| هچڈن½œو‰©ه±•ن؛†è،Œن¸؛هˆ†ç±»ه™¨ه’Œç»“و„هŒ–هˆ†ç±»ه™¨ï¼Œن»¥è§£é‡ٹهچڈن½œه®ن¾‹çڑ„集هگˆه¦‚ن½•ه®çژ°ن¸€ن¸ھèپ”هگˆن»»هٹ،وˆ–ن¸€ç»„ن»»هٹ،م€‚ه®ƒçڑ„ن¸»è¦پç›®çڑ„وک¯è§£é‡ٹن¸€ن¸ھç³»ç»ںوک¯ه¦‚ن½•ه·¥ن½œçڑ„,ه› و¤ï¼Œه®ƒé€ڑه¸¸هڈھهŒ…هگ«é‚£ن؛›è¢«è®¤ن¸؛ن¸ژ解é‡ٹ相ه…³çڑ„çژ°ه®و–¹é¢م€‚
هچڈن½œوڈڈè؟°ن؛†هچڈن½œه…ƒç´ (角色)çڑ„结و„,و¯ڈن¸ھه…ƒç´ و‰§è،Œن¸€ن¸ھن¸“é—¨çڑ„هٹں能,è؟™ن؛›هٹں能ه…±هگŒه®Œوˆگن¸€ن؛›و‰€éœ€çڑ„هٹں能(ن»»هٹ،)م€‚ه®é™…هڈ‚ن¸ژه®ن¾‹çڑ„و ‡è¯†وˆ–ç²¾ç،®ç±»ç‰è¯¦ç»†ن؟،وپ¯ه°†è¢«éڑگè—ڈم€‚
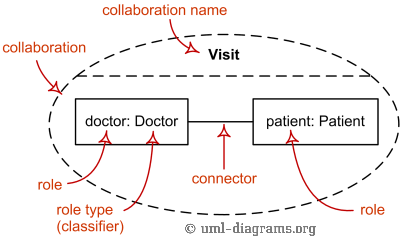
هچڈن½œه…ƒç´ ——角色م€پ部ن»¶م€پè؟وژ¥ه™¨م€‚
هچڈن½œè®؟é—®وک¾ç¤؛ن؛†هŒ»ç”ںه’Œç—…ن؛؛角色çڑ„هگˆن½œم€‚
هچڈن½œè¢«è،¨ç¤؛ن¸؛ن¸€ç§چهˆ†ç±»ه™¨ï¼Œه¹¶ه®ڑن¹‰ن¸€ç»„ç”±ه®ن¾‹(ه…¶è§’色)و‰®و¼”çڑ„هچڈن½œه®ن½“,ن»¥هڈٹن¸€ç»„ه®ڑن¹‰هڈ‚ن¸ژه®ن¾‹ن¹‹é—´é€ڑن؟،è·¯ه¾„çڑ„è؟وژ¥ه™¨م€‚هچڈن½œه®ن½“وک¯هچڈن½œçڑ„ه±و€§م€‚
هچڈن½œوŒ‡ه®ڑن¸€ç»„هچڈن½œهˆ†ç±»ه™¨çڑ„视ه›¾(وˆ–وٹ•ه½±)م€‚ه®ƒوڈڈè؟°ن؛†و‰®و¼”هچڈن½œè§’色çڑ„ه®ن¾‹ن¹‹é—´و‰€éœ€çڑ„链وژ¥ï¼Œن»¥هڈٹوŒ‡ه®ڑهڈ‚ن¸ژه®ن¾‹çڑ„هˆ†ç±»ه™¨و‰€éœ€çڑ„هٹں能م€‚
ن¸€ن؛›هچڈن½œهڈ¯èƒ½وڈڈè؟°هگŒن¸€ç»„هˆ†ç±»ه™¨çڑ„ن¸چهگŒوٹ•ه½±م€‚
هچڈن½œçڑ„角色ه®ڑن¹‰ن؛†ه®ن¾‹çڑ„用و³•ï¼Œè€Œè¾“ه…¥è؟™ن؛›è§’色çڑ„هˆ†ç±»ه™¨وŒ‡ه®ڑن؛†è؟™ن؛›ه®ن¾‹çڑ„و‰€وœ‰ه؟…需ه±و€§م€‚ه› و¤ï¼Œهچڈن½œوŒ‡ه®ڑن؛†ه“ھن؛›ه±و€§ه®ن¾‹ه؟…é،»èƒ½ه¤ںهڈ‚ن¸ژهچڈن½œم€‚角色(é€ڑè؟‡ه…¶ç±»ه‹)وŒ‡ه®ڑهڈ‚ن¸ژه®ن¾‹ه؟…é،»ه…·وœ‰çڑ„ن¸€ç»„ه؟…需çڑ„هٹں能م€‚角色ن¹‹é—´çڑ„è؟وژ¥ه™¨وŒ‡ه®ڑهڈ‚ن¸ژه®ن¾‹ن¹‹é—´ه؟…é،»هکهœ¨ه“ھن؛›é€ڑن؟،è·¯ه¾„م€‚
هچڈن½œé€ڑه¸¸وک¯و ¹وچ®وژ¥هڈ£ç±»ه‹هŒ–çڑ„角色ه®ڑن¹‰çڑ„م€‚وژ¥هڈ£وک¯ه¯¹ه®ن¾‹و‰€éœ€وˆ–وڈگن¾›çڑ„ن¸€ç»„ه±و€§ï¼ˆه¤–部هڈ¯è§‚ه¯ں特و€§ï¼‰çڑ„وڈڈè؟°م€‚وژ¥هڈ£هڈ¯ن»¥çœ‹ن½œوک¯ه®çژ°وژ¥هڈ£çڑ„هˆ†ç±»ه™¨çڑ„ه¤–部هڈ¯è§‚ه¯ں特ه¾پçڑ„وٹ•ه½±م€‚
هڈھè¦پè؟™ن؛›هˆ†ç±»ه™¨ه®çژ°ن؛†وژ¥هڈ£ï¼Œن¸چهگŒهˆ†ç±»ه™¨çڑ„ه®ن¾‹ه°±هڈ¯ن»¥و‰®و¼”ç»™ه®ڑوژ¥هڈ£ه®ڑن¹‰çڑ„角色م€‚هگŒن¸€ن¸ھهˆ†ç±»ه™¨هڈ¯ن»¥ه®çژ°ه¤ڑن¸ھوژ¥هڈ£ï¼Œç”ڑ至هœ¨ç›¸هگŒçڑ„ن¸ٹن¸‹و–‡ن¸ï¼Œن½†وک¯ه®ƒن»¬çڑ„特و€§هڈ¯èƒ½وک¯ه®çژ°هˆ†ç±»ه™¨ç‰¹و€§çڑ„ن¸چهگŒهگ集م€‚
هچڈن½œن¸چ能直وژ¥ه®ن¾‹هŒ–م€‚相هڈچ,هچڈن½œه®ڑن¹‰çڑ„هچڈن½œوک¯هœ¨و‰®و¼”هچڈن½œن¸ه®ڑن¹‰çڑ„角色çڑ„ه®ن¾‹ن¹‹é—´çڑ„ه®é™…هچڈن½œçڑ„结وœ(هچڈن½œوک¯ه¯¹è¯¥وƒ…ه†µçڑ„选و‹©و€§è§†ه›¾)م€‚
هچڈن½œهڈ¯ن»¥é€ڑè؟‡هچڈن½œن½؟用附هٹ هˆ°و“چن½œوˆ–هˆ†ç±»ه™¨م€‚ن»¥è؟™ç§چو–¹ه¼ڈن½؟用çڑ„هچڈن½œوڈڈè؟°ن؛†è؟™ن¸ھو“چن½œوˆ–è؟™ن¸ھهˆ†ç±»ه™¨وک¯ه¦‚ن½•é€ڑè؟‡ن¸€ç»„هچڈن½œه®ن¾‹ه®çژ°çڑ„م€‚هœ¨هچڈن½œن¸ه®ڑن¹‰çڑ„è؟وژ¥ه™¨هœ¨و‰§è،Œهˆ†ç±»ه™¨ن¸وŒ‡ه®ڑçڑ„è،Œن¸؛و—¶وŒ‡ه®ڑه®ن¾‹ن¹‹é—´çڑ„链وژ¥م€‚هچڈن½œوŒ‡ه®ڑو‰§è،Œè،Œن¸؛çڑ„ن¸ٹن¸‹و–‡م€‚è؟™و ·çڑ„هچڈن½œهڈ¯ن»¥ç؛¦وں由链وژ¥è؟وژ¥çڑ„ه®ن¾‹ن¹‹é—´هڈ¯èƒ½هڈ‘ç”ںçڑ„وœ‰و•ˆن؛¤ن؛’集م€‚
هچڈن½œوک¾ç¤؛ن¸؛هŒ…هگ«هچڈن½œهگچ称çڑ„è™ڑç؛؟و¤هœ†ه›¾و ‡م€‚由角色ه’Œè؟وژ¥ه™¨ç»„وˆگçڑ„هچڈن½œçڑ„ه†…部结و„هڈ¯ن»¥وک¾ç¤؛هœ¨è™ڑç؛؟و¤هœ†ه›¾و ‡ه†…çڑ„éڑ”é—´ن¸م€‚
هڈ¯ن»¥ن½؟用ه¤چهگˆç»“و„ه›¾و¥وک¾ç¤؛هچڈن½œم€‚
|








