|
|
目录
|
|
SV-10b系统状态转换说明 |
|
作者:俎涛,张贵显(火龙果科技) |
1768 次浏览 |
 65次
65次 |
|
|
|
动机: 更好的了解系统功能状态和转换,识别引起系统功能状态改变的各种事件 。
内容: 描述了 系统功能的状态随事件发生的变化。 定义 系统功能 必须提供的可能状态,以及这些状态之间可能的转换 。
SV-10b 的用途包括:
• 定义状态,事件和状态转换(行为建模)。
• 识别约束。
SV-10b 将事件与资源状态相关联,并描述了从一种状态到另一种状态的转换。
SV-10b 基于状态图。状态机被定义为“描述某些动态视图元素的所有可能行为的规范。行为被视为特定状态图的遍历,这些状态图由一个或多个连接的过渡弧连接,这些过渡弧由一系列事件实例的调度触发。在遍历期间,状态机执行一系列与状态机的各种元素相关联的操作。”状态图可以明确地转换为结构化的文本规则,这些规则指定事件的时序方面以及对这些事件的响应。然而,状态图的图形形式通常可以对规则集的完整性进行快速分析,并检测死角或缺失条件。如果在解决方案分析阶段未及早发现这些错误,通常会导致现场能力出现严重的行为错误,并导致昂贵的纠正工作。
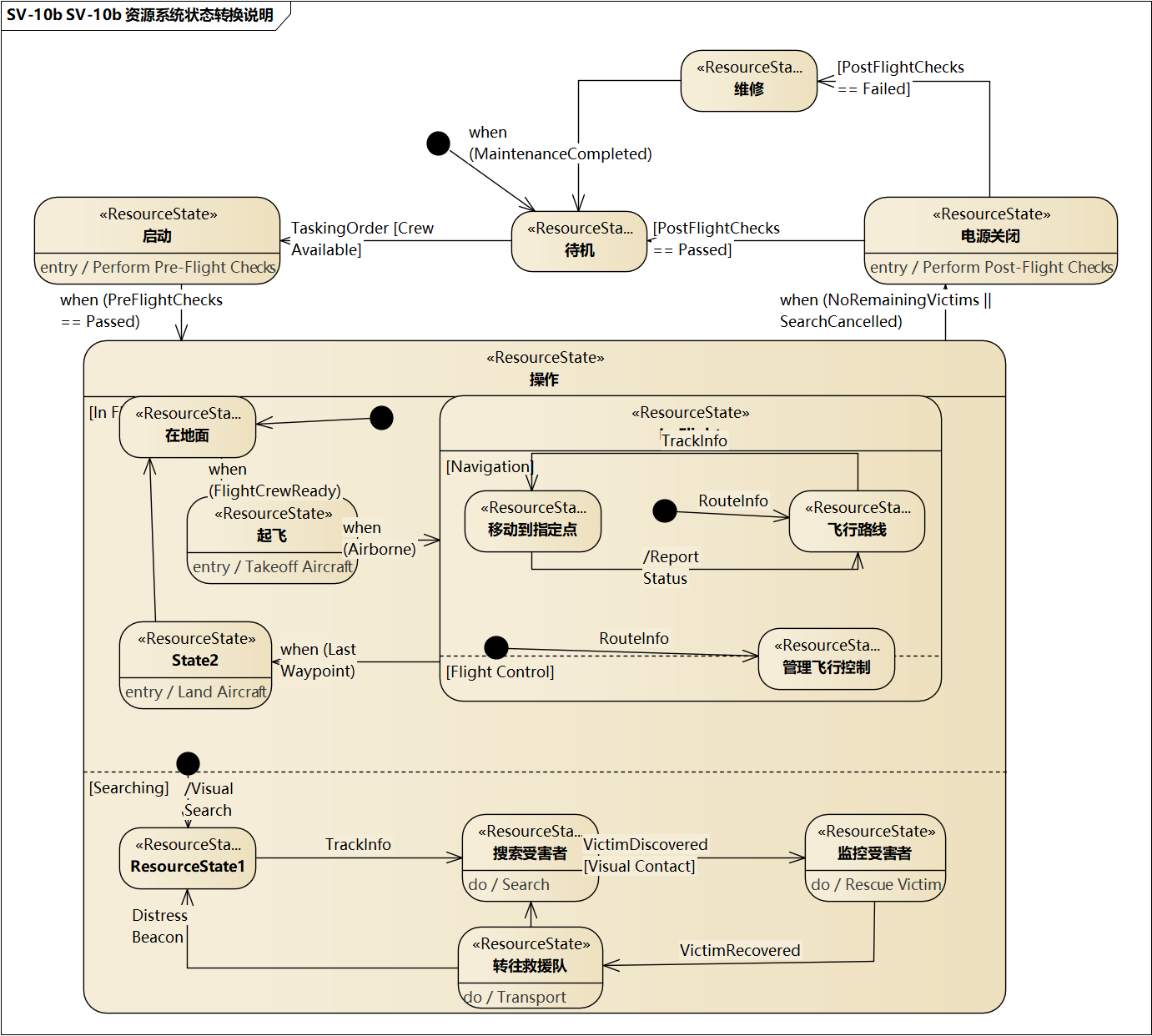
SV-10b 从资源的角度对状态转换进行建模,重点是资源如何响应刺激(例如,触发器和事件)。与 OV-6b 操作状态转换说明中,这些响应会根据所应用的规则集或条件以及接收刺激时资源的状态而有所不同。状态的变化称为过渡。每个转换都根据特定的事件和当前状态指定响应。动作可能与给定的状态或状态之间的转换相关联。状态及其关联的动作指定资源或服务功能对事件的响应。当事件发生时,下一个状态可能会根据当前状态 ( 及其关联的操作 ) 、事件以及规则集或保护条件而变化。
SV-10b 可用于描述 SV-4 系统功能描述中描述的功能的详细顺序。但是, SV-10b 中包含的动作与 SV-4 系统功能描述中的功能之间的关系取决于架构的目的和模型中使用的抽象级别。 SV-4 系统功能描述中未完全表达响应外部和内部事件的功能的显式排序。 SV-10b 可用于反映功能的显式顺序,单个功能内部的动作的顺序或相对于特定资源的功能的顺序。
SV-10b 模型中的状态可以嵌套。这样就可以创建非常复杂的模型来表示系统行为。根据架构项目的需求, SV-10b 可以单独使用,也可以与 SV-10c 系统事件跟踪描述结合使用。
SV -10b 示例:下图 SAR 示例模型的飞机 (SV-4 运输功能 ) 的行为。
SV-10b建模说明(建模工具EA):
| Toolbox |
说明 |
|
Resource State:资源状态
Resource State Machine:资源状态机
Service Access:服务访问
|
|
1768 次浏览 |
65次 |
|
|
|
|
|
| |
|
|







