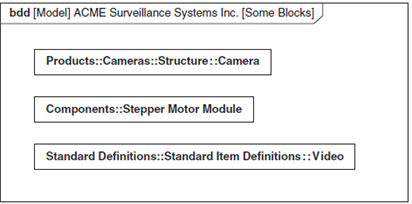
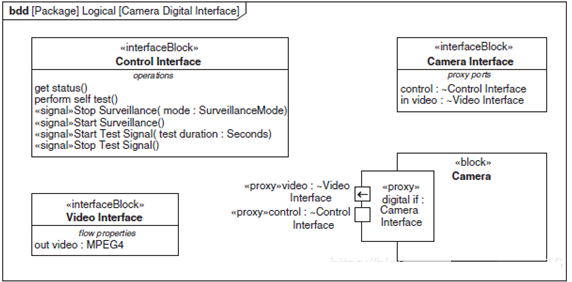
еЫЊ7.3жШЊз§ЇдЄАдЄ™ж®°еЭЧеЃЪдєЙеЫЊпЉМеЕґдЄ≠жЬЙдЄЙдЄ™ж®°еЭЧеЬ®еЕђеПЄдЉБдЄЪж®°еЮЛдЄ≠,зІ∞дЄЇACME Surveillance Systems IncгАВж®°еЭЧзЪДеРНзІ∞дљњзФ®еМЕеРЂиЈѓеЊДзЪДйЩРеЃЪеРНзІ∞пЉМжШЊз§ЇеЃГдїђеЬ®ж®°еЮЛзЪДеМЕе±Вжђ°еЖЕйГ®зЪДеЃЪдљН,жШЊз§ЇеЬ®еЫЊ6.4гАВж®°еЭЧжШЊз§ЇеМЕеРЂдЇЖдљњзФ®иМГеЫі:CameraжШѓдЄАдЄ™ACMEдЇІеУБзЪДдЄАдЄ™жППињ∞пЉЫStepper Motorж®°еЭЧжШѓдЄАдЄ™зО∞жИРзЪДзїДдїґдљњзФ®еЬ®ACMEзЪДжСДеГПе§ідЄ≠пЉЫеТМVideo襀䚜зФ®жЭ•жППињ∞жСДеГПе§ізФЯжИРзЪДиІЖйҐСеЫЊеГПпЉМгАВ
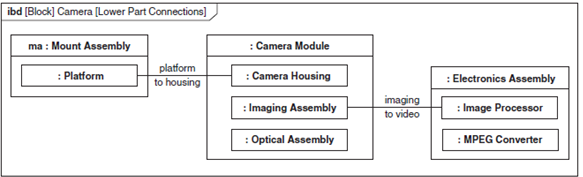
ељУдЄАдЄ™ињЮжО•еЩ®еЬ®зїУжЮДзЪДдЄАдЄ™е±В篲襀䚜зФ®жЭ•жЈїеК†жЫіе§ЪеЕ≥дЇОдЄАдЄ™ињЮжО•еЩ®зЪДзїЖиКВеЬ®дЄАдЇЫжЫійЂШе±Вжђ°,жЬЙжљЬеЬ®зЪДйЧЃйҐШдљњзФ®зїіжК§зїУжЮЬж®°еЮЛгАВдЊЛе¶В,е¶ВжЮЬжЭ•иЗ™еЫЊ7.7зЪДm1ињЮжО•еٮ襀еИ†йЩ§дїОж®°еЮЛдЄ≠,platform to housingеЇФиѓ•дєЯ襀襀еИ†йЩ§? е¶ВжЮЬињЩзІНз±їеЮЛзЪДеЕ≥з≥їжШѓйЗНи¶БзЪД,йЪПеРОдЄАдЄ™еЕ≥иБФзЪДж®°еЭЧеσ俕襀зФ®жЭ•жШЊз§ЇињЮжО•еЩ®зЪДеИЖиІ£дї•ж®°еЭЧжШЊз§ЇзїДжИРйГ®еИЖзЪДеИЖиІ£зЫЄдЉЉзЪДжЦєеЉПгАВеЕ≥иБФзЪДж®°еЭЧ襀жППињ∞еЬ®зђђ7.3.3иКВгАВзЂѓеП£зЪДдљњзФ®дєЯжШѓйЗНи¶БзЪДеѓєеЇФиІ£еЖ≥ињЩзІНз±їеЮЛзЪДйЧЃйҐШпЉМж≠£е¶ВжППињ∞еЬ®зђђ7.6иКВгАВ
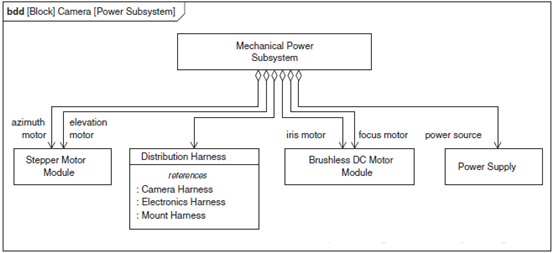
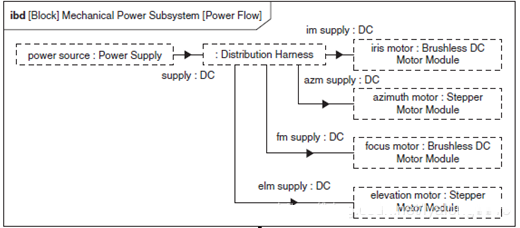
еЫЊ7.10жШЊз§ЇдЄАдЄ™ж®°еЭЧеРНзІ∞дЄЇMechanical Power subsystemпЉМеЕґдљњзФ®еЉХзФ®еЕ≥иБФжЭ•еЉХзФ®жСДеГПе§ізЪДPower Supply,еЃГзЪДеК®еКЫжЬЇжҐ∞зїДдїґ,еМЕеРЂеЬ®е§ЪдЄ™и£ЕйЕНдљУдЄ≠зЪДзФµжЬЇеТМDistribution HarnessгАВDistribution HarnessеМЕеРЂеЉХзФ®е±ЮжАІеЉХзФ®еЕґеЃГharnessesпЉМеЃГдїђжШѓжСДеГПе§ідЄ≠зЪДдЄНеРМи£ЕйЕНзЪДйГ®еИЖгАВеЬ®жСДеГПе§ізЪДзїДеРИе±Вжђ°дЄ≠пЉМ зїДдїґжШѓиЃЄе§ЪдЄНеРМи£ЕйЕНзЪДйГ®еИЖ,еЕґдЄ≠зЪДдЄАдЇЫ襀жШЊз§ЇеЬ®еЫЊ7.5гАВMechanical Power subsystemи°®з§ЇињЩдЇЫзїДдїґзЪДдЄАдЄ™йАїиЊСзїДеРИпЉМдЇ§дЇТдЄЇжСДеГПе§іжПРдЊЫеК®еКЫгАВзЩљиЙ≤йТїзЯ≥дњЃй•∞襀䚜зФ®еЬ®ињЩдЄ™дЊЛе≠РдЄ≠жЭ•еЉЇи∞ГMechanical Power subsystemзЪДжЬђиі®жШѓеЉХзФ®еЕ≥иБФ,дљЖињЩзІНеЉЇи∞ГжШѓдЄ•ж†ЉзЪДзђ¶еПЈеТМж≤°жЬЙиѓ≠дєЙйЪРиЧПгАВ
дЄНеРМзЪДеЯЇдЇОж®°еЮЛзЪДжЦєж≥ХеПѓдї•еМЕеРЂдЄАдЄ™ж®°еЭЧпЉМиѓЄе¶ВпЉМMechanical Power SubsystemеЬ®ж®°еЮЛзїУжЮДзЪДдЄНеРМйГ®еИЖгАВињЩйЗМеЃГ襀еМЕеРЂеЬ®жСДеГПе§іж®°еЭЧиЗ™иЇЂ,дљЖеЃГеПѓдї•дїЕдљЬдЄЇзЃАеНХзЪДеЈ≤зїП襀жФЊзљЃињЫзЫЄдЉЉзЪДе≠Рз≥їзїЯзЪДдЄАдЄ™зЙєеЃЪзЪДеМЕгАВMechanical Power SubsystemзЪДдЄАдЄ™еЃЮдЊЛдЄНжШЊз§ЇеЬ®жСДеГПе§ізЪДи£Ее§Зж†С,дљЖжШѓжЫіеГПдЄАдЄ™и£Ее§Зж†СзЪДйГ®еИЖзЪДдЄАдЄ™дЇ§еПЙиІЖеЫЊгАВ
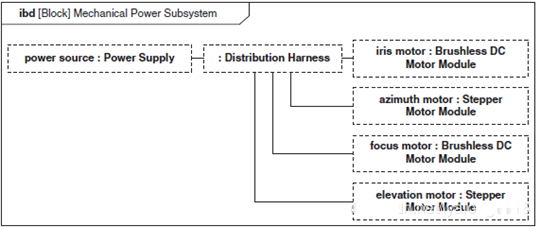
еЫЊ7.11жШЊз§ЇињЮжО•еЬ®Mechanical Power SubsystemзЪДеЉХзФ®е±ЮжАІдљњзФ®жЭ•жФѓжМБеК®еКЫдЉ†иЊУеЬ®е≠Рз≥їзїЯеЖЕйГ®гАВеЬ®ињЩзІНжГЕеЖµдЄЛ,дЄАдЄ™еНХдЄАзЪДpower sourceдЄЇжЙАжЬЙжСДеГПе§іжПРдЊЫжЬЇжҐ∞йГ®еИЖйЬАи¶БзЪДеК®еКЫйАЪињЗDistribution HarnessгАВ
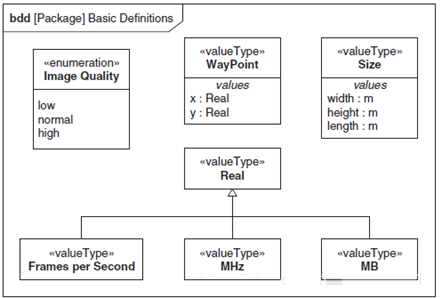
еЫЊ7.17жШЊз§ЇдЄАдЇЫжХ∞еАЉз±їеЮЛеЬ®Basic DefinitionsеМЕдЄ≠гАВSizeжШѓдЄАдЄ™зїУжЮДеМЦзЪДз±їеЮЛ,еЄ¶жЬЙдЄЙдЄ™е≠РеЕГзі†:widthгАБheightеТМlengthпЉЫеЃГдїђзЪДжХ∞еАЉз±їеЮЛжШѓжХ∞еАЉз±їеЮЛm(еѓєеЇФз±≥)гАВmзЪДеЃЪдєЙеМЕеРЂеЃГзЪДеНХдљНеИґеТМжХ∞йЗПз±їеЮЛеТМ襀йЪПеРОжШЊз§ЇеЬ®еЫЊ7.19гАВImage QualityжШѓдЄАдЄ™жЮЪ䪌襀䚜зФ®жЭ•жМЗеЃЪйАЪињЗжСДеГПе§іжНХжНЙеИ∞зЪДеЫЊеГПзЪДиі®йЗП,еЕґеσ俕襀зФ®жЭ•жОІеИґпЉМе§Ъе∞СжХ∞ж́襀йЬАи¶БжНХжНЙеИ∞жѓПдЄ™иІЖйҐСеЄІгАВеЕґеЃГжХ∞еАЉз±їеЮЛйГљжШѓеЃЮжХ∞з±їеЮЛ,жЙАдї•жМЗеЃЪSysMLжХ∞еАЉз±їеЮЛдЄЇRealгАВеЬ®ињЩзІНжГЕеЖµдЄЛжМЗеЃЪ襀зЃАеНХеЉАеІЛпЉМжХ∞еАЉз±їеЮЛеѓєеЇФMHzгАБMBеТМFrames per SecondжШѓеЃЮжХ∞з±їеЮЛгАВеПВиАГзђђ7.7иКВиОЈеПЦжЫідЄУдЄЪзЪДиЃ®иЃЇеЕ≥дЇОзђ¶еПЈеТМжДПдєЙгАВ
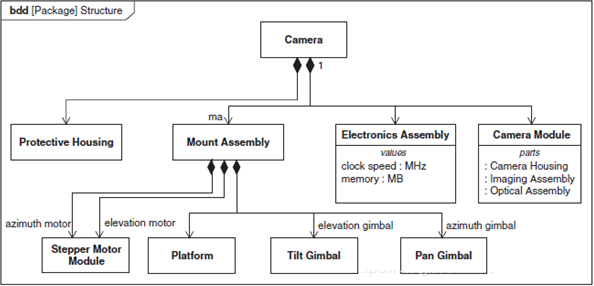
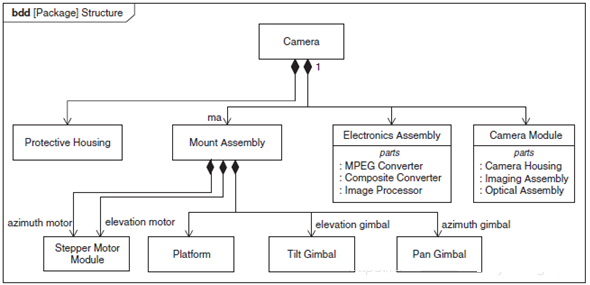
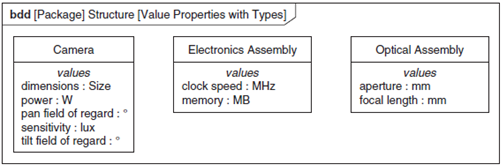
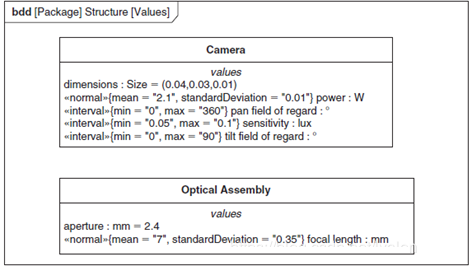
еЫЊ7.20жШЊз§ЇдЄАдЄ™ж®°еЭЧеЃЪдєЙеЫЊеМЕеРЂдЄЙдЄ™еЄ¶жЬЙжХ∞еАЉе±ЮжАІзЪДж®°еЭЧ:CameraгАБElectronics AssemblyеТМOptical AssemblyгАВжХ∞еАЉе±ЮжАІдЄ≠зЪДдЄАдЇЫпЉМиѓЄе¶ВпЉМElectronics Assemblyж®°еЭЧзЪДclock speedеТМmemoryз±їеЮЛеМЦдљњзФ®жХ∞еАЉз±їеЮЛеЃЪдєЙеЬ®еЫЊ7.17гАВеЕґеЃГз±їеЮЛеМЦдљњзФ®жШЊз§ЇеЬ®еЫЊ7.19гАВдЊЛе¶В,Cameraж®°еЭЧзЪДsensitivityжХ∞еАЉе±ЮжАІйФЃеЕ•lux,еЕґжµЛйЗПзЕІеЇ¶гАВжХ∞еАЉз±їеЮЛзЪДеРНзІ∞еєґдЄНйЩРдЇОе≠ЧжѓНжХ∞е≠Че≠Чзђ¶гАВдЊЛе¶В, Cameraж®°еЭЧдЄ≠зЪДpan field of regardйФЃеЕ•е≠Чзђ¶вАЬ0вАЭ,еЕґжШѓдЄАдЄ™иІТеЇ¶зЪДж†ЗењЧгАВ
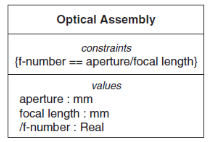
еЫЊ7.22жШЊз§Їе§ЪдЄ™еИЖеЄГе±ЮжАІ,еЕґдЄ≠зЪДpan field of regardеТМfocal lengthгАВpan field of regardжШѓеЉІзЪДе∞ЇеѓЄпЉМCameraеПѓдї•еЬ®ињЩдЄ™иМГеЫіеЖЕжЧЛиљђпЉМ襀еЃЪдєЙдљЬдЄЇдЄАдЄ™еЖЕйГ®еИЖеЄГеЄ¶жЬЙдЄАдЄ™жЬАе∞ПеАЉ00еТМдЄАдЄ™жЬАе§ІеАЉ3600пЉМзФ±дЇОеЃЮйЩЕзЪДpan field of regardеАЉдЊЭиµЦдЇОжСДеГПе§ізЪДеЃЙи£ЕгАВOptical AssemblyзЪДfocal length襀еЃЪдєЙдљЬдЄЇдЄАдЄ™ж≠£жАБеИЖеЄГеЄ¶жЬЙдЄАдЄ™7mmзЪДеє≥еЭЗеАЉеТМеТМдЄАдЄ™0.35mmзЪДж†ЗеЗЖеБПз¶їпЉИstandardDeviationпЉЙгАВињЩеѓєеЇФдљњзФ®еИґйА†ињЗз®ЛйА†жИРзЪДзЪДиґЕеЈЃпЉМеЊЃе∞ПеБПеЈЃзЪДе∞Жељ±еУНзїДеРИйАПйХЬеТМеПНе∞ДйХЬзЪДдљНзљЃгАВ
pan field of regardеТМfocal lengthзЪДеИЖеЄГеЬ®жХідЄ™зЫЄжЬЇзЪДеЕ•еП£еТМеЕЙе≠¶зїДдїґдЄКгАВCameraзЪДdimensionsеТМOptical AssemblyзЪДapertureжЬЙйїШиЃ§еАЉ,дЄАдЄ™зЃАеНХзЪДж†ЗйЗПеѓєеЇФaperture,еТМdimensionsзЪДжѓПдЄ™жЦєеРСпЉИ3зїіпЉЙйГљжЬЙеѓєеЇФзЪДеАЉгАВ
й°єдєЯеПѓдї•жµБеК®еЬ®ињЮжО•зЪДеЉХзФ®е±ЮжАІдєЛйЧігАВеЫЊ7.28жШЊз§ЇзФµжµБ(襀谮积йАЪињЗж®°еЭЧDC)йАЪињЗMechanical Power Subsystemж®°еЭЧпЉМеѓєеЇФеЙНйЭҐзЪДеЫЊ7.11гАВжЭ•иЗ™power sourceзЪДжХідЄ™жµБйАЪињЗDistribution HarnessеИ∞е§ЪдЄ™зФµжЬЇгАВеЬ®ињЩзІНжГЕеЖµдЄЛ,жѓП䪙鰺襀谮积йАЪињЗдЄАдЄ™зЫЄеЇФзЪДй°єе±ЮжАІеН†жЬЙйАЪињЗMechanical Power SubsystemгАВ
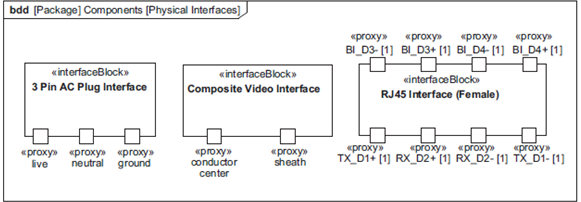
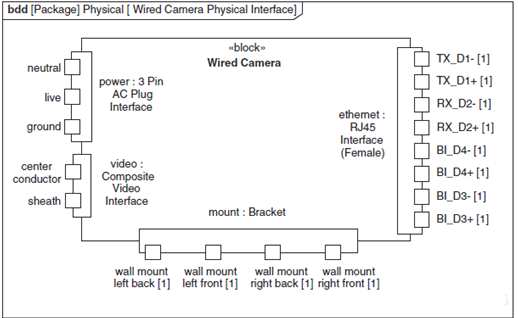
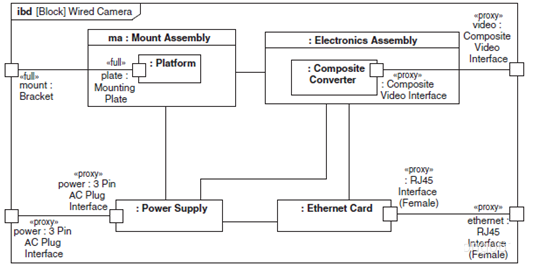
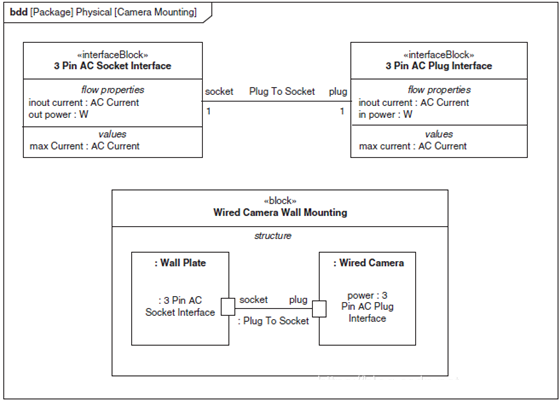
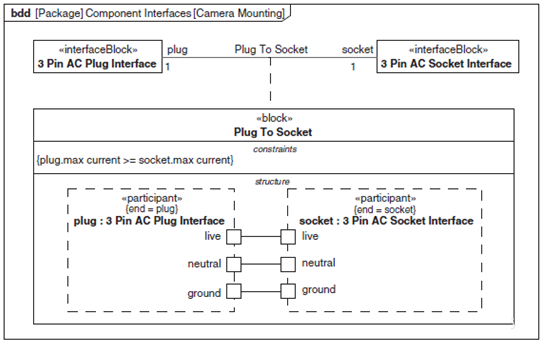
еЬ®еЫЊ7.35,Wired CameraзЪДpowerзЂѓеП£дЄОPower SupplyзЪДpowerзЂѓеП£ињЮжО•йАЪињЗдЄАдЄ™йЪРеЉПзЪДеЖЕйГ®ињЮжО•еЩ®гАВ2дЄ™зЂѓеП£з±їеЮЛйГљжШѓ3 Pin AC Plug Interface,еЃЪдєЙеЬ®еЫЊ7.37гАВињЮжО•еЩ®зЪДзїИзВєжШѓзЙєеЊБеЕЉеЃєзЪДпЉМзФ±дЇО2дЄ™йГљжЬЙдЄАдЄ™currentзЪДжµБе±ЮжАІ,еЕЉеЃєзЪДз±їеЮЛеТМinoutжµБжЦєеРС,еєґдЄФеЃГдїђйГљжЬЙдЄАдЄ™powerжµБе±ЮжАІдљњзФ®еЕЉеЃєзЪДз±їеЮЛеТМзЫЄеРМзЪДжЦєеРСгАВ
ж®°еЭЧеЃЪдєЙеЫЊеЬ®еЫЊ7.37дЄ≠пЉМжШЊз§Ї3 Pin AC Plug InterfaceеТМ3 Pin AC Socket InterfaceзЪДеЃЪдєЙпЉМеЬ®еЃГдїђдєЛйЧідљњзФ®дЄАдЄ™еЕ≥иБФ, Plug to SocketгАВеЃГдєЯжШЊз§ЇдЄАдЄ™ж®°еЭЧзІ∞дЄЇWired Camera Wall MountingдљњзФ®зїУжЮДиИ±жЃµжШЊз§ЇзФµжЇРе¶ВдљХ襀дЊЫеЇФеИ∞жСДеГПе§ігАВеҐЩйЭҐеТМжСДеГПе§ідєЛйЧізЪДзЪДе§ЦйГ®ињЮжО•еЩ®з±їеЮЛдЄЇPlug To SocketгАВж≠£е¶ВиЃ®иЃЇеЬ®зђђ7.3.3иКВпЉМињЮжО•еЩ®зЪДзїИзВєжШѓеЕЉеЃєзЪДдЄОињЮжО•еЩ®зїИзВєзЪДз±їеЮЛгАВињЮжО•еЩ®зЪДзїИзВєдєЯжЬЙеЕЉеЃєзЪДжµБе±ЮжАІ,еМЕеРЂдЄАдЄ™currentжµБе±ЮжАІпЉМеЃГзЪДз±їеЮЛжШѓзЫЄеРМзЪДеТМжЦєеРСжШѓinout,еТМдЄАдЄ™powerе±ЮжАІпЉМеЃГзЪДз±їеЮЛжШѓзЫЄеРМзЪДеТМеЃГзЪДжЦєеРСзЫЄдЇТдєЛйЧіжШѓзЫЄеПНзЪДгАВеЃГдїђдєЯйГљжЬЙmax currentзЪДжХ∞еАЉе±ЮжАІпЉМеЃГзЪДз±їеЮЛжШѓAC CurrentпЉЫзФ±дЇОеЃГдЄНжШѓдЄАдЄ™жЬЙеРСзЪДзЙєеЊБ,жЦєеРСеЕЉеЃєжАІиІДеИЩдЄНйАВзФ®гАВ
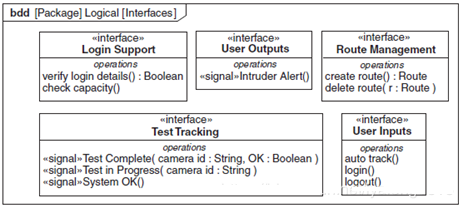
еЫЊ7.45жШЊз§Ї5дЄ™жО•еП£пЉМжППињ∞дЄНеРМзЪДжЬНеК°зЪДйАїиЊСеИЖзїДеѓєеЇФзЫСжОІз≥їзїЯзЪДжЦєйЭҐгАВдЊЛе¶В, Test TrackingеМЕеРЂдЄАзїДжО•жФґйЫЖпЉМеЕґеЕБиЃЄеЬ®жСДеГПе§іжµЛиѓХињЗз®ЛдЄ≠пЉМжК•еСКињЫеЇ¶гАВеЕґеЃГжО•еП£жФѓжМБеЕґеЃГжЬНеК°(дЊЛпЉМзФ®жИЈеТМиЈѓзФ±зЃ°зРЖ)гАВ
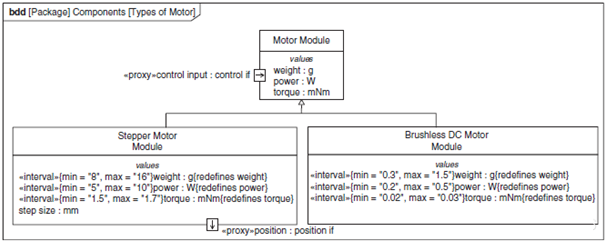
ж≠§е§ЦеѓєдЇОжХ∞еАЉе±ЮжАІ,Motor ModuleеЃЪдєЙдЄАдЄ™control inputзЪДйАЪзФ®ж¶ВењµдљњзФ®дЄАдЄ™дї£зРЖзЂѓеП£гАВBrushless DC Motor ModuleеТМStepper Motor Module襀谮积дљЬдЄЇињЩдЄ™йАЪзФ®ж¶ВењµзЪДе≠Рз±їеЄ¶жЬЙеЃГдїђиЗ™еЈ±зЪДзЙєеЃЪзЙєеЊБ,иѓЄе¶ВпЉМStepper Motor ModuleзЪДstep sizeеТМpositionиЊУеЗЇзЂѓеП£гАВж≠§е§Ц, жЭ•иЗ™Motor ModuleзЪДйАЪзФ®зЪДе±ЮжАІеЈ≤зїП襀йЗНеЃЪдєЙеЬ®е≠Рз±їдЄ≠дЄЇдЇЖжФЊзљЃзїСеЃЪеЬ®еЃГдїђзЪДеАЉдЄКпЉМжШѓйАВеРИзЪДеИ∞зФµжЬЇзЪДз±їеЮЛгАВжХ∞еАЉе±ЮжАІиҐЂжППињ∞йАЪињЗдЄАдЄ™?interval?ж¶ВзОЗеИЖеЄГи°®з§ЇжХ∞еАЉе±ЮжАІзЪДиМГеЫіеПѓдї•жЬЙеЬ®еЃГдїђзїЩеЃЪзЪДе≠Рз±їдЄ≠гАВ
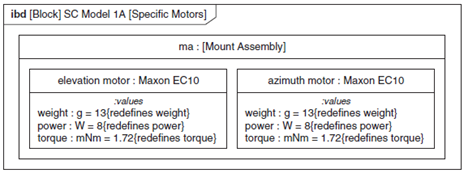
еЫЊ7.52жШЊз§ЇзЫСжОІжСДеГПжЬЇзЪДдЄАдЄ™зЙєеЃЪж®°еЮЛзЪДе∞ПзЙЗжЃµSC Model 1 A,дЄУдЄЪзЫЄжЬЇгАВеЬ®SC Model 1 AдЄ≠,йАЪзФ®зЪДStepper Motor ModuleдљњзФ®еЬ®жСДеГПжЬЇзЪДMount Assembly(ma)еЈ≤зїП襀жЫњжНҐйАЪињЗдЄАдЄ™зЙєеЃЪзЪДзФµжЬЇж®°еЭЧеМЕеРЂMaxon EC10гАВдЄЇдЇЖињЫи°МињЩдЄ™жЫњжНҐ,иАМдЄНжШѓдЄУйЧ®зФЯжИРдЄАдЄ™ж®°еЭЧи°®з§ЇињЩдЄ™Mount AssemblyзЪДеПШдљУ,дЄАдЄ™е±ЮжАІзЙєеЃЪз±їеЮЛзЪД襀䚜зФ®гАВMaxon EC10жШОжШЊзЪДе±ЮжАІиҐЂжШЊз§ЇеЬ®зїДжИРйГ®еИЖзЪД:valuesиИ±жЃµдЄ≠гАВ