жіїеК®еЫЊ
жіїеК®еЫЊжШѓиГље§ЯзФ®жЭ•дЉ†иЊЊз≥їзїЯеК®жАБи°МдЄЇдњ°жБѓзЪДдЄЙзІНSysMLеЫЊдєЛдЄАгАВжіїеК®еЫЊеПѓдї•и°® з§ЇеРДзІНеРДж†ЈзЪДжіїеК®пЉМзФЪиЗ≥еПѓдї•жППињ∞е§НжЭВзЪДи°МдЄЇгАВеѓєи±°иКВзВєеПѓдї•йАЪињЗжіїеК®еѓєдЇЛдїґгАБиГљ еКЫеТМжХ∞жНЃзЪДжµБеїЇж®°пЉМдљњзФ®жОІеИґиКВзВєеПѓдї•жОМжОІжіїеК®зЪДжЙІи°МгАВжіїеК®еИЖеМЇеПѓдї•дЄЇз≥їзїЯзїУжЮДеИЖ йЕНз≥їзїЯи°МдЄЇгАВ
1гАБзЫЃзЪД
жіїеК®еЫЊжШѓдЄАзІНи°МдЄЇеЫЊ;еЃГжШѓз≥їзїЯзЪДдЄАзІНеК®жАБиІЖеЫЊпЉМиѓіжШОйЪПзЭАжЧґйЧізЪДжО®зІїи°МдЄЇеТМдЇЛ дїґзЪДеПСзФЯеЇПеИЧгАВињЩдЄОзїУжЮДеЫЊ(BDDгАБ[BDеТМеПВжХ∞еЫЊ)зЫЄеѓєпЉМзїУжЮДеЫЊйГљжШѓйЭЩжАБиІЖеЫЊпЉМдЄН дЉЪи°®иЊЊдїїдљХеК®жАБзЪДжЧґйЧіпЉМжИЦиАЕз≥їзїЯеПКеЕґзОѓеҐГзЪДеПШеМЦгАВ
жіїеК®еЫЊгАБеЇПеИЧеЫЊеТМзКґжАБжЬЇеЫЊжШѓSysMLжПРдЊЫзЪДжМЗеЃЪз≥їзїЯи°МдЄЇзЪДдЄЙзІНйАЙжЛ©гАВжЙАжЬЙдЄЙ зІНеЫЊйГљеПѓдї•и°®иЊЊињЮзї≠еТМеєґеПСзЪДи°МдЄЇпЉМдї•еПКйЪПзЭАжЧґйЧізЪДжО®зІїеПСзФЯзЪДдЇЛдїґгАВзДґиАМпЉМжѓПзІНеЫЊ йГљжЬЙеЕґдЉШзВєеТМзЉЇзВєпЉМдљ†йЬАи¶Бж†єжНЃзЬЛеЫЊиАЕзЪДйЬАж±ВињЫи°МйАЙжЛ©гАВ
жіїеК®еЫЊзЙєеИЂжУЕйХњйАЪињЗи°МдЄЇи°®з§Їеѓєи±°вАФвАФдЇЛдїґгАБиГљйЗПжИЦиАЕжХ∞жНЃвАФвАФзЪДжµБеК®пЉМеЕ≥ж≥®з≥ї зїЯжУНдљЬжЧґпЉМеѓєи±°жШѓе¶ВдљХеЬ®и°МдЄЇзЪДжЙІи°МињЗз®ЛдЄ≠襀聜йЧЃеТМдњЃжФєзЪДгАВеЃГзЪДеЕ≥йФЃдЉШеКњеЬ®дЇОеПѓиѓї жАІ;жіїеК®еЫЊеПѓдї•и°®иЊЊе§НжЭВзЪДжОІеИґйАїиЊСпЉМињЩи¶БжѓФеЇПеИЧеЫЊеТМзКґжАБжЬЇеЫЊжЫіеЉЇгАВеП¶е§ЦпЉМжіїеК®еЫЊ жШѓеФѓдЄАиГље§ЯиѓіжШОињЮзї≠з≥їзїЯи°МдЄЇзЪДеЫЊгАВ
жіїеК®еЫЊз°ЃеЃЮдєЯе≠ШеЬ®зЉЇзВєпЉМеЃГзХ•жШЊж®°з≥КгАВжіїеК®еЫЊиѓіжШОжЙІи°МеК®дљЬзЪДй°ЇеЇПпЉМеЃГдїђеПѓдї•жЬЙ йАЙжЛ©еЬ∞иѓіжШОеУ™зІНзїУжЮДжЙІи°МдЇЖеУ™дЄ™еК®дљЬгАВзДґиАМеЃГдїђеєґж≤°жЬЙжПРдЊЫдїїдљХжЬЇеИґжЭ•иѓіжШОеУ™дЄ™зїУжЮД иІ¶еПСеУ™дЄ™еК®дљЬ(зЫЄеѓєиАМи®АпЉМеЇПеИЧеЫЊеПѓдї•иѓіжШОжЙАжЬЙдЄЙзІНдњ°жБѓ)гАВ
зФ±дЇОдЄКињ∞еОЯеЫ†пЉМељУдЄОеИ©зЫКзЫЄеЕ≥иАЕеНПдљЬеЃЪдєЙйЧЃйҐШз©ЇйЧіпЉМеєґжМЗеЃЪз≥їзїЯжЙАйЬАи¶БзЪДи°МдЄЇ жЧґпЉМеїЇж®°иАЕдЉЪдљњзФ®жіїеК®еЫЊдљЬдЄЇеИЖжЮРеЈ•еЕЈгАВжіїеК®еЫЊеѓєдЇОиѓ¶зїЖиЃЊиЃ°вАФвАФеН≥йАВзФ®дЇОз≥їзїЯеЃЮзО∞зЪДгАБжШОз°ЃзЪДи°МдЄЇиѓіжШОвАФвАФеєґдЄНжШѓдЄАзІНзЙєеИЂжЬЙзФ®зЪДеЈ•еЕЈгАВ
2гАБдљХжЧґеИЫеїЇжіїеК®еЫЊ
еЫ†дЄЇжіїеК®еЫЊдљЬдЄЇдЄАзІНеИЖжЮРеЈ•еЕЈдЄЇжЬЙжХИпЉМжЙАдї•еЬ®дљ†йЬАи¶БеТМеИ©зЫКзЫЄеЕ≥иАЕж≤ЯйАЪпЉМжГ≥и¶Б жНХиОЈз≥їзїЯеПКеЕґжЙІи°МиАЕжЬЯжЬЫзЪДи°МдЄЇжЧґпЉМеЃГжШѓй¶ЦеЕИи¶БеИЫеїЇзЪДи°МдЄЇеЫЊгАВдљ†ињШдЉЪдљњзФ®жіїеК®еЫЊдЄО еЫҐйШЯдЄ≠зЪДеЕґдїЦжИРеСШж≤ЯйАЪпЉМдї•жНХиОЈз≥їзїЯеЖЕйГ®зїДжИРйГ®еИЖжЬЯжЬЫзЪДи°МдЄЇгАВзЃАиАМи®АдєЛпЉМеИЫеїЇжіїеК® еЫЊеєґдЄНдЉЪдЄОз≥їзїЯзФЯеСљеС®жЬЯзЪДзЙєеЃЪйШґжЃµзїСеЃЪгАВ
жЯРдЇЫеїЇж®°жЦєж≥ХдЉЪи¶Бж±Вдљ†еИЫеїЇжіїеК®еЫЊдљЬдЄЇеی嚥еМЦзФ®дЊЛиѓіжШОдє¶(еѓєдЇОзђђ5зЂ†дЄ≠иЃ®иЃЇзЪД жЦЗе≠ЧиѓіжШОдє¶пЉМжИЦиАЕжШѓеПЦиАМдї£дєЛпЉМжИЦиАЕжШѓдљЬдЄЇи°•еЕЕ)гАВе¶ВжЮЬињЩж†ЈеЃЮиЈµпЉМйВ£дєИдљ†е∞±дЉЪеЬ®дЄЇ з≥їзїЯж®°еЮЛжЈїеК†жЦ∞зЪДзФ®дЊЛжЧґеИЫеїЇжіїеК®еЫЊгАВ
3гАБжіїеК®еЫЊе§Цж°Ж
жіїеК®еЫЊзЪДз±їеЮЛзЉ©еЖЩжШѓactгАВеЕґдЄ≠еФѓдЄАеЕБиЃЄдљњзФ®зЪДж®°еЮЛеЕГзі†з±їеЮЛжШѓжіїеК®гАВжіїеК®еЫЊзЪД е§Цж°Жи°®з§Їдљ†еЬ®з≥їзїЯж®°еЮЛжЯРе§ДеЃЪдєЙзЪДеНХдЄ™жіїеК®гАВ
жіїеК®жЬђиЇЂжШѓдЄАзІНж®°еЮЛеЕГзі†гАВеЃГжШѓдЄАзІНи°МдЄЇгАВеЃГдєЯжШѓдЄАзІНеСљеРНз©ЇйЧіпЉМеТМж®°еЭЧдї•еПКеМЕ з±їдЉЉгАВеЫ†ж≠§еЃГеПѓдї•еМЕеРЂдЄАз≥їеИЧз≥їзїЯе±ВзЇІеЕ≥з≥їдЄ≠еЈ≤зїПеСљеРНзЪДеЕГзі†вАФвАФиКВзВєеТМиЊєзЉШгАВдљ†еПѓ дї•еЬ®зЫЄеЕ≥иБФзЪДжіїеК®еЫЊзЪДе§Цж°ЖеЖЕжШЊз§ЇйВ£дЇЫеМЕеРЂзЪДеЕГзі†гАВ
дљ†и¶БзЯ•йБУпЉМжіїеК®еТМжіїеК®еЫЊеєґдЄНдЄАж†ЈгАВељУдљњзФ®жіїеК®ињЩдЄ™жЬѓиѓ≠зЪДжЧґеАЩпЉМжИСжМЗзЪДжШѓдЄА дЄ™ж®°еЮЛеЕГзі†пЉМиАМдЄНжШѓзЫЄеЕ≥зЪДеЫЊгАВиѓЈеЫЮй°ЊдЄАдЄЛзђђ2зЂ†еЯЇдЇОж®°еЮЛеЈ•з®ЛзЪДеЯЇжЬђж¶ВењµпЉЪж®° еЮЛзЪДеЫЊж∞ЄињЬйГљдЄНжШѓж®°еЮЛжЬђиЇЂ;еЃГеП™жШѓж®°еЮЛзЪДдЄАзІНиІЖеЫЊгАВеЬ®дљ†зЪДз≥їзїЯдЄ≠еЃЪдєЙдЄАдЄ™жії еК®пЉМиАМдЄНжККеЃГжШЊз§ЇеЬ®жіїеК®еЫЊдЄ≠пЉМжШѓеЃМеЕ®ж≤°жЬЙйЧЃйҐШзЪДгАВдљЖе§Іе§ЪжХ∞жГЕеЖµдЄЛпЉМдљ†йГљдЉЪжШЊ з§ЇеЃГгАВ
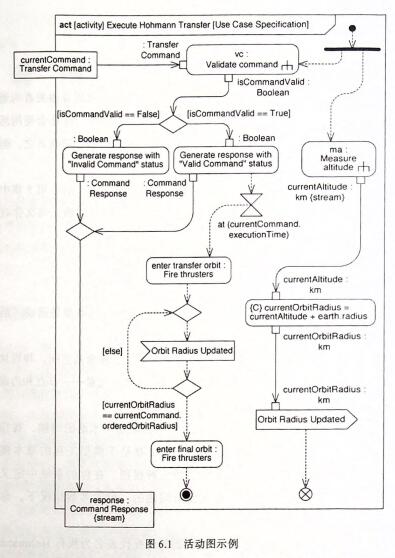
еЫЊ6.1дЄ≠зЪДеЫЊе§ійГ®еСКиѓЙжИСдїђпЉМињЩдЄ™жіїеК®еЫЊзЪДе§Цж°Ждї£и°®еРНдЄЇжЙІи°МHohmannиљђжНҐзЪД жіїеК®пЉМеЃГе≠ШеЬ®дЇОж®°еЮЛе±ВзЇІеЕ≥з≥їдЄ≠зЪДжЯРе§ДгАВињЩдЄ™еЫЊзЪДеРНзІ∞жШѓвАЬзФ®дЊЛиѓіжШОдє¶вАЭгАВињЩдЄ™еРНзІ∞ дЉ†иЊЊдЇЖеЫЊзЪДзЫЃзЪДпЉЪдљЬдЄЇеРМж†ЈеРНзІ∞зЪДзФ®дЊЛзЪДеی嚥еМЦиѓіжШОгАВ
4гАБеЕ≥дЇОдї§зЙМжµБзЪДдЄАдЄ™иѓН
иіѓз©њжЬђзЂ†пЉМжИСйГљдЉЪдљњзФ®дї§зЙМињЩдЄ™жЬѓиѓ≠пЉМеЫ†дЄЇжіїеК®жШѓеїЇзЂЛеЬ®дї§зЙМжµБзЪДж¶ВењµдєЛдЄКзЪДгАВ еєґдЄФпЉМйТИеѓєжіїеК®дЄ≠еРДзІНз±їеЮЛзЪДиКВзВєеТМиЊєзЉШзЪДиІДеИЩдєЯжШѓзФ®дї§зЙМжµБињЩдЄ™жЬѓиѓ≠иѓіжШОзЪДгАВ дї§зЙМжµБжШѓдЄАзІНжКљи±°зЪДж¶ВењµгАВдї§зЙМдЄНжШѓж®°еЮЛеЕГзі†пЉМдљ†дЄНдЉЪеЬ®з≥їзїЯж®°еЮЛдЄ≠еИЫеїЇеЃГдїђпЉМдљ†дєЯдЄНдЉЪеЬ®жіїеК®еЫЊдЄ≠жШЊз§ЇеЃГдїђгАВдї§зЙМзЪДжГ≥ж≥ХеТМSysMLеЕ≥дЇОжіїеК®гАБиКВзВєеТМиЊєзЉШзЪДеЃЪдєЙ зіІеѓЖзЫЄеЕ≥гАВдљ†ењЕй°їдЊЭиµЦдЇОдљ†зЪДжГ≥и±°жЭ•зРЖиІ£жіїеК®дЄ≠зЪДдї§зЙМжµБпЉМиАМйВ£дЄ™жіїеК®дЉЪзїЩдЇИеРДзІНз±ї еЮЛиКВзВєеТМиЊєзЉШзЪДиІДеИЩгАВ
жИСеПСзО∞дЄАзІНжЬЙеК©дЇОзРЖиІ£дї§зЙМж¶ВењµзЪДжЦєж≥ХпЉМе∞±жШѓжККдї§зЙМељУдљЬеЮДжЦ≠жЄЄжИПеН°пЉМеЃГдЉЪеЬ®жії еК®еЫЊдєЛйЧізІїеК®пЉМиЈ®иґКиЊєзЉШпЉМдїОдЄАдЄ™иКВзВєеИ∞еП¶дЄАдЄ™иКВзВєгАВеПѓдї•жЬЙе§ЪдЄ™дї§зЙМжµБеК®йАЪињЗжіїеК® зЪДдЄАжђ°жЙІи°МгАВжѓПдЄ™дї§зЙМйГљеЯЇдЇОеЕґжЬђиЇЂзЪДз±їеЮЛеТМзКґжАБпЉМеЃЪдєЙжіїеК®зЪДеК®дљЬеТМжОІеИґйАїиЊСдї•еПК еЬ®жіїеК®жЙІи°МињЗз®ЛдЄ≠еПСзФЯзЪДдЇЛдїґпЉМдЄНдЊЭиµЦеЕґдїЦдї§зЙМињЫи°МзІїеК®гАВ(иѓЈзЫЄдњ°жИСпЉМжЙАжЬЙињЩдЇЫеЖЕ еЃєйГљдЉЪеЬ®еРОзї≠зЪДзЂ†иКВдЄ≠еПШеЊЧжЫіжЄЕжЩ∞гАВ)
дї§зЙМдї£и°®зЪДжШѓдїАдєИеСҐ?з≠Фж°ИеМЕжЛђдЄ§дЄ™йГ®еИЖгАВй¶ЦеЕИпЉМжЬЙдЄ§зІНз±їеЮЛзЪДдї§зЙМпЉЪеѓєи±°дї§зЙМ еТМжОІеИґдї§зЙМгАВжИСдїОзЃАеНХзЪДеЉАеІЛдїЛзїНгАВ
еѓєи±°дї§зЙМдї£и°®зЪДжШѓеЬ®жіїеК®дЄ≠жµБеК®зЪДдЇЛдїґгАБиГљйЗПжИЦиАЕжХ∞жНЃзЪДеЃЮдЊЛгАВеЃГеПѓдї•дїОжАїдљУдЄК дї£и°®дЄАдЄ™жіїеК®зЪДиЊУдЇЇжИЦиАЕиЊУеЗЇпЉМеєґдЄФеПѓдї•дї£и°®жіїеК®дЄ≠дЄАдЄ™еК®дљЬзЪДиЊУдЇЇжИЦиЊУеЗЇгАВж≠£еЉПзЪД иѓіж≥ХжШѓпЉМдЄАдЄ™еѓєи±°дї§зЙМдї£и°®дљ†еЬ®ж®°еЮЛе±ВзЇІеЕ≥з≥їдЄ≠жЯРе§ДеИЫеїЇзЪДж®°еЭЧгАБеАЉз±їеЮЛжИЦиАЕдњ°еПЈзЪД еЃЮдЊЛ(дї•еЃЪдєЙдЇЛдїґгАБиГљMжИЦиАЕжХ∞жНЃзЪДз±їеЮЛ)гАВж≠£е¶Вдљ†еПѓиГљжЬЯжЬЫзЪДпЉМдЉЪжЬЙе§ЪдЄ™еѓєи±°дї§зЙМ жµБеК®йАЪињЗжіїеК®зЪДеНХжђ°жЙІи°МгАВ
жОІеИґдї§зЙМвА¶вА¶дїАдєИйГљдЄНдї£и°®гАВжИСжШѓиѓідЄНдї£и°®дїїдљХзЙ©зРЖзЪДдЄЬи•њгАВеЃГж≤°жЬЙз±їеЮЛ(ж®° еЭЧгАБеАЉз±їеЮЛжИЦиАЕдњ°еПЈ)гАВжОІеИґдї§зЙМеП™и°®з§ЇжіїеК®зЪДеУ™дЄ™еК®дљЬеЬ®жіїеК®жЙІи°МзЪДзЙєеЃЪжЧґеИїе§ДдЇО еРѓзФ®зКґжАБгАВеПѓиГљдЉЪжЬЙе§ЪдЄ™жОІеИґдї§зЙМжµБињЗжіїеК®зЪДеНХжђ°жЙІи°МгАВйВ£ж†ЈжДПеС≥зЭАжіїеК®дЄ≠зЪДе§ЪдЄ™еК® дљЬеРМжЧґе§ДдЇОеРѓзФ®зКґжАБгАВ
жИСзЯ•йБУзО∞еЬ®ињЩињШйЭЮеЄЄжКљи±°пЉМдљЖеЬ®еЉАеІЛзЪДжЧґеАЩжЬЙдЇЖињЩдЇЫеЯЇз°АпЉМдљ†дЉЪжЫіе•љеЬ∞зРЖиІ£жЬђ зЂ†з®НеРОзЪДдЊЛе≠РгАВеЬ®жИСиЃ®иЃЇиГље§ЯеЗЇзО∞еЬ®жіїеК®еЫЊдЄ≠еРДзІНеЕГзі†зЪДжЧґеАЩпЉМе∞±дЉЪж†єжНЃдї§зЙМжµБиѓі жШОйВ£дЄ™еЕГзі†зЪДиІДеИЩгАВиІДеИЩжЬЙеЊИе§Ъ;еЉАеІЛзЬЛиµЈжЭ•дЉЪиЃ©дЇЇдЄНзЯ•жЙАжО™гАВдљЖйЪПзЭАдљ†дЄНжЦ≠йШЕиѓї еТМеИЫеїЇжіїеК®еЫЊпЉМе∞±дЉЪжЕҐжЕҐдїОжХідљУдЄКзРЖиІ£иІДеИЩзЪДжДПдєЙпЉМдљ†зїИеПѓдї•иІ£йЗКеТМиѓіжШОе§НжЭВзЪД з≥їзїЯи°МдЄЇгАВ
5гАБеЯЇжЬђеК®дљЬ
еК®дљЬжШѓдЄАзІНеПѓдї•е≠ШеЬ®дЇОжіїеК®дєЛдЄ≠зЪДиКВзВєпЉМеЃГжШѓдЄЇжіїеК®еЯЇжЬђзЪДеКЯиГљеНХеЕГеїЇж®°зЪДиКВ зВєгАВдЄАдЄ™еК®дљЬдї£и°®жЯРзІНз±їеЮЛзЪДе§ДзРЖжИЦиАЕиљђжНҐпЉМеЃГдЉЪеЬ®з≥їзїЯжУНдљЬињЗз®ЛдЄ≠жіїеʮ襀жЙІи°МзЪДжЧґеАЩеПСзФЯгАВ
еЯЇжЬђеК®дљЬзЪДж†ЗиѓЖж≥ХжШѓеЬЖиІТзߩ嚥гАВжИСиѓівАЬеЯЇжЬђвАЭпЉМжШѓеЫ†дЄЇжЬЙе§ЪзІНзЙєжЃКз±їеЮЛзЪДеК®дљЬпЉМ жѓПдЄ™йГљжЬЙеЕґиЗ™иЇЂзЪДж†ЗиѓЖж≥Х(жЫіе§ЪеЖЕеЃєиѓЈиІБ6.8иКВ)гАВ
дљ†еПѓдї•еЬ®жіїеК®дЄ≠иЊУдЇЇдїїдљХжГ≥и¶БзЪДи°МдЄЇжППињ∞гАВдљ†зЪДжППињ∞дЉЪжШЊз§ЇдЄЇжіїеК®еЫЊдЄКеЬЖиІТзߩ嚥 дЄ≠зЪДе≠Чзђ¶дЄ≤гАВеЄЄиІБзЪДжШѓпЉМз≥їзїЯеїЇж®°иАЕдЉЪжККеК®дљЬеЖЩжИРзФ®иЗ™зДґиѓ≠и®А(еГПиЛ±иѓ≠)и°®ињ∞зЪДеК® иѓНзЯ≠иѓ≠гАВеЫЊ6.2жШЊз§ЇдЇЖдЄАдЄ™з§ЇдЊЛгАВ
е∞љзЃ°SysMLдЄНи¶Бж±ВпЉМдљЖжИСињШжШѓеїЇиЃЃпЉМе•љжККеК®дљЬеЖЩжИРдЄАдЄ™зЯ≠иѓ≠пЉМзФ±жЬЙеКЫгАБжЧ†ж≠ІдєЙзЪДеК®иѓНеЉАеІЛгАВеП¶е§ЦпЉМдљ†еЇФиѓ•йБњеЕНжККе§ЪдЄ™еК®иѓНжФЊеЬ®дЄАдЄ™еК®дљЬдЄ≠.иАМеЇФиѓ•жККеЃГеИЖиІ£жИРе§ЪдЄ™еК®дљЬгАВдЊЛе¶ВпЉМдЄНи¶БеЖЩвАЬй™МиѓБеєґдњЭе≠ШеСљдї§вАЭпЉМиАМеЇФиѓ•еИЫеїЇдЄ§дЄ™ињЮзї≠зЪДеК®дљЬпЉЪвАЬй™МиѓБеСљдї§вАЭеТМвАЬдњЭе≠ШеСљдї§вАЭгАВ
е¶ВжЮЬдЄНдљњзФ®иЗ™зДґиѓ≠и®АпЉМдљ†ињШеПѓдї•дљњзФ®ж≠£еЉПзЪДзЉЦз®Лиѓ≠и®А(еГПCгАБJavaгАБVerilogжИЦиАЕModelica)жЭ•жППињ∞жіїеК®еЫЊдЄ≠зЪДеК®дљЬгАВSysMLжККињЩж†ЈзЪДе£∞жШОеПЂеБЪдЄНйАПжШОи°®иЊЊеЉПгАВињЩдЄ™зІ∞еСЉеєґдЄНйЗНи¶БпЉМдљЖжШѓдљ†еЇФиѓ•зЯ•йБУдЄНйАПжШОи°®иЊЊеЉПжЬЙдЄ§дЄ™йГ®еИЖпЉЪиѓ≠и®АеТМдЄїдљУгАВдљ†дЉЪдљњзФ®иК±жЛђеПЈжЭ•жМЗеЃЪиѓ≠и®АпЉМеЃГдљНдЇОдЄїдљУдєЛеЙНгАВеЫЊ6.3жШЊз§ЇдЇЖеЄ¶жЬЙдЄНйАПжШОи°®иЊЊеЉПзЪДеК®дљЬзЪДдЊЛе≠РпЉМеЃГзФ±cиѓ≠и®АзЉЦеЖЩгАВ(дљЖж≥®жДПпЉМдЄНйАПжШОи°®иЊЊеЉПеєґдЄНжШѓеП™иГљдљњзФ®зЉЦз®Лиѓ≠и®АгАВ)
з≥їзїЯеїЇж®°иАЕеЊИе∞СдЉЪжККеК®дљЬеЖЩжИРдЄНйАПжШОи°®иЊЊеЉПгАВеЉАеПСеЫҐйШЯдЉЪзїПеЄЄеЬ®жіїеК®еЫЊдЄ≠ињЩдєИеБЪпЉМеИЫеїЇйВ£дЇЫеЫЊзФ®дЇОж≤ЯйАЪдїЦдїђзЪДиЃЊиЃ°гАВдљЖжШѓпЉМйВ£дЇЫеЉАеПСеЫҐйШЯзЪДеИ©зЫКзЫЄеЕ≥иАЕйЬАи¶БзЯ•йБУе¶ВдљХиІ£йЗКеМЕеРЂдЄНйАПжШОи°®иЊЊеЉПзЪДжіїеК®еЫЊгАВ
дЄАдЄ™жЬЙзФ®дЄФжЬЙжДПдєЙзЪДжіїеК®жАїжШѓдЉЪеМЕеРЂдЄАдЄ™дї•дЄКеК®дљЬ(е¶ВеЫЊ6.1жЙАз§Ї)гАВдљ†дЉЪдљњзФ®иЊєзЉШжЭ•ињЮжО•жіїеК®дЄ≠зЪДеК®дљЬпЉМиЊєзЉШдЉЪеЃЪдєЙжОТе•љеЇПзЪД(жЬЙжЧґжШѓеєґеПСзЪД)еЇПеИЧгАВйВ£дЇЫеЇПеИЧдЉЪдїОжХідљУдЄКжППињ∞жіїеК®гАВеТМзђђ5зЂ†дЄ≠зЪДиѓіжШОжЦЗе≠ЧжППињ∞дЄАж†ЈпЉМе•љзЪДжіїеК®еЫЊи°®ињ∞жЄЕжЩ∞гАВ
дљ†дљњзФ®жіїеК®еЫЊи°®ињ∞зЪДдЄНдїЕдїЕжШѓеК®дљЬзЪДеЇПеИЧ;еЃГињШеПѓдї•и°®иЊЊеѓєи±°жµБвАФвАФжАїдљУдЄКжЭ•иѓіе∞±жШѓйВ£дЇЫеК®дљЬеТМжіїеК®зЪДиЊУдЇЇеТМиЊУеЗЇгАВ(дљ†еПѓдї•еЬ®дЄЛдЄАиКВдЄ≠зЬЛеИ∞жЫіе§ЪеЕ≥дЇОињЩдЄ™йЧЃйҐШзЪДдњ°жБѓгАВ)
6гАБеѓєи±°иКВзВє
еѓєи±°иКВзВєжШѓеП¶дЄАзІНиГље§Яе≠ШеЬ®дЇОжіїеК®дєЛдЄ≠зЪДиКВзВєпЉМеЃГдЉЪеѓєеѓєи±°дї§зЙМйАЪињЗжіїеК®зЪДжµБеїЇ ж®°(еЕґдЄ≠еѓєи±°дї§зЙМдї£и°®зЪДжШѓдЇЛдїґгАБиГљйЗПжИЦиАЕжХ∞жНЃзЪДеЃЮдЊЛ)гАВеѓєи±°иКВзВєеЄЄеЗЇзО∞еЬ®дЄ§дЄ™ еК®дљЬдєЛйЧіпЉМдї•и°®з§ЇзђђдЄАдЄ™еК®дљЬдЉЪдЇІеЗЇеѓєи±°дї§зЙМдљЬдЄЇиЊУеЗЇпЉМзђђдЇМдЄ™еК®дљЬдЉЪе∞ЖињЩдЇЫеѓєи±°дї§ зЙМдљЬдЄЇиЊУдЇЇгАВ
еѓєи±°иКВзВєзЪДж†ЗиѓЖж≥ХжШѓдЄАдЄ™зߩ嚥гАВжШЊз§ЇеЬ®еѓєи±°иКВзВєдЄ≠зЪДеРНзІ∞е≠Чзђ¶дЄ≤дЉЪжЛ•жЬЙдЄЛйЭҐзЪДж†ЉеЕ•пЉЪ
еѓєи±°иКВзВєеРНзІ∞жШѓеїЇж®°иАЕеЃЪдєЙзЪДпЉМз±їеЮЛењЕй°їдЄОдљ†еЬ®ж®°еЮЛе±ВзЇІеЕ≥з≥їдЄ≠жЯРе§ДеЃЪдєЙзЪДж®° еЭЧпЉМеАЉз±ї?жИЦиАЕдњ°еПЈзЪДеРНзІ∞еМєйЕНпЉМеЃГдЉЪжМЗеЃЪеѓєи±°иКВзВєиГље§ЯжМБжЬЙзЪДеѓєи±°дї§зЙМз±їеЮЛгАВе§ЪйЗН жАІдЉЪжМЗеЃЪпЉМеЬ®жіїеК®зЪДжЙІи°МињЗз®ЛдЄ≠зЪДзЙєеЃЪжЧґеИїпЉМеѓєи±°иКВзВєиГље§ЯжМБжЬЙе§Ъе∞СдЄ™еѓєи±°дї§зЙМгАВе¶В жЮЬеЬ®еРНзІ∞е≠Чзђ¶дЄ≤дЄ≠ж≤°жЬЙжШЊз§ЇпЉМйВ£дєИеѓєи±°иКВзВєйїШиЃ§е§ЪйЗНжАІдЄЇ1..1гАВ
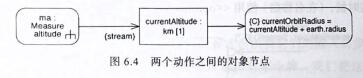
еЫЊ6.4дЄ≠зЪДжіїеК®зЙЗжЃµжШЊз§ЇдЇЖеРНдЄЇcurrentAltitudeзЪДеѓєи±°иКВзВєгАВеЃГжМБжЬЙдї£и°®еАЉз±їеЮЛ kmзЪДеЃЮдЊЛзЪДеѓєи±°дї§зЙМгАВе≠Чзђ¶дЄ≤жЬЂе∞ЊзЪДе§ЪйЗНжАІи°®з§ЇпЉМзђђдЄАдЄ™жіїеК®еП™дЉЪдЇІеЗЇдЄАдЄ™еѓєи±°дї§ зЙМдљЬдЄЇиЊУеЗЇпЉМиАМзђђдЇМдЄ™еК®дљЬеП™йЬАи¶БдЄАдЄ™еѓєи±°дї§зЙМдљЬдЄЇиЊУдЇЇ(дї•дЊњеРѓеК®)гАВ
еѓєи±°иКВзВєеП¶дЄАдЄ™жЬЙзФ®зЪДзЙєжАІжШѓпЉМеЃГеПѓдї•йАЙжЛ©жШЊз§ЇеИЖйЪФж°ЖдЄАе∞±еГПж®°еЭЧжИЦиАЕзїДжИРйГ® еИЖе±ЮжАІдЄАж†ЈвАФвАФжЭ•и°®з§ЇеЃГжМБжЬЙзЪДеѓєи±°дї§зЙМзЪДеЖЕйГ®е±ЮжАІгАВељУзДґпЉМеП™жЬЙеЬ®жМЗеЃЪзЪДз±їеЮЛ(ж®° еЭЧгАБеАЉз±їеЮЛжИЦиАЕдњ°еПЈ)зЬЯж≠£жЛ•жЬЙеЖЕйГ®еО≤жАІзЪДжЧґеАЩпЉМињЩжЙНзЬЯж≠£жЬЙзФ®гАВеОЯеІЛеАЉз±їеЮЛпЉМеГП km,ж†єжЬђе∞±дЄНйЬАи¶БгАВ
6.1 ж†У
ж†У(pin)жШѓдЄАзІНзЙєжЃКз±їеЮЛзЪДеѓєи±°иКВзВєгАВдљ†дЉЪжККж†УйЩДеК†еИ∞еК®дљЬдЄКпЉМи°®з§ЇеК®дљЬзЪДиЊУеЕ• жИЦиЊУеЗЇгАВж†УзЪДж†ЗиѓЖж≥ХжШѓйЩДзЭАеЬ®еК®дљЬе§ЦиЊєзХМдЄКзЪДе∞ПжЦєеЭЧпЉМе¶ВеЫЊ6.5жЙАз§ЇгАВ
дљ†еПѓдї•йАЙжЛ©еЬ®жЦєеЭЧеЖЕйГ®жШЊз§ЇдЄАдЄ™зЃ≠е§іпЉМдї•жМЗеЃЪж†Удї£и°®зЪДжШѓиЊУдЇЇињШжШѓиЊУеЗЇгАВдљЖе¶ВжЮЬ дљ†зФ®иЊєзЉШжККдЄ§дЄ™ж†УињЮжО•еЬ®дЄАиµЈпЉМйВ£дєИињЩе∞±жШѓе§ЪдљЩзЪДпЉМиАМе§Іе§ЪжХ∞жЧґеАЩдљ†йГљдЉЪињЩдєИеБЪгАВж†У зЪДеРНзІ∞е≠Чзђ¶дЄ≤ж†ЉеЉПеТМеѓєи±°иКВзВєдЄАж†ЈпЉМдљЖеЃГдЉЪжШЊз§ЇеЬ®ж†УзЪДйЩДињСпЉМиАМдЄНжШѓжШЊз§ЇеЬ®ж†УдЄ≠(еОЯ еЫ†жШЊиАМжШУиІБ)гАВ
еЫЊ6.5дЄ≠зЪДжіїеК®зЙЗжЃµжШѓеЫЊ6.4дЄ≠жЙАжШЊз§ЇзЪДеРМдЄАдЄ™ж®°еЮЛзЪДеП¶дЄАзІНиІЖеЫЊгАВж†УзЪДжДПдєЙеТМ еѓєи±°иКВзВєдЄАж†Ј;ж†УеП™жШѓдљ†еПѓдї•ж†єжНЃеЕЈдљУжГЕеЖµйАЙжЛ©зЪДеП¶дЄАзІНж†ЗиѓЖж≥ХпЉМдї•жї°иґ≥зЬЛеЫЊиАЕзЪДзЙєжЃКйЬАж±ВгАВжѓПзІНжЦєеЉПйГљжЬЙдЉШзВєеТМзЉЇзВєгАВ
еѓєи±°иКВзВєж†ЗиѓЖж≥ХеПѓдї•жШЊз§ЇеИЖйЪФж°ЖпЉМдї•и°®з§ЇеЃГжЙАжМБжЬЙзЪДеѓєи±°дї§зЙМзЪДеЖЕйГ®е±ЮжАІгАВзДґ иАМпЉМеЃГи¶БжѓФж†Уж†ЗиѓЖж≥ХеН†жНЃжіїеК®еЫЊдЄ≠жЫіе§Ъз©ЇйЧігАВж†Уж†ЗиѓЖж≥ХжЧ†ж≥ХжШЊз§ЇеИЖйЪФж°ЖпЉМдљЖињЩзІНж†ЗиѓЖ ж≥ХжЫіиКВзЬБз©ЇйЧігАВдљЬдЄЇиІДеИЩпЉМжИСеїЇиЃЃйАЙжЛ©ж†Уж†ЗиѓЖж≥ХдљЬдЄЇйїШиЃ§зЪДйАЙй°єпЉМеП™жЬЙеЬ®дЄАдЇЫдЄНеЄЄиІБ зЪДеЬЇеРИпЉМељУдљ†йЬАи¶БжШЊз§Їеѓєи±°дї§зЙМзЪДеЖЕйГ®е±ЮжАІзЪДжЧґеАЩпЉМжЙНдљњзФ®еѓєи±°иКВзВєж†ЗиѓЖж≥ХгАВ
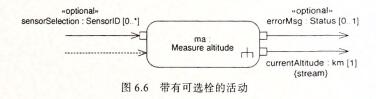
еЫЊ6.6жШЊз§ЇдЇЖиЊУдЇЇж†УеТМиЊУеЗЇж†УзЪДдЊЛе≠РпЉМжѓПдЄ™ж†УйГљжЛ•жЬЙдЄЛйЩРдЄЇйЫґзЪДе§ЪйЗНжАІгАВињЩжШѓдљ† еѓєжЛ•жЬЙеПѓйАЙиЊУдЇЇжИЦиЊУеЗЇзЪДеК®дљЬеїЇж®°зЪДжЦєеЉПгАВеЄ¶жЬЙеПѓйАЙиЊУдЇЇж†УзЪДеК®дљЬзФЪиЗ≥еПѓдї•еЬ®ж≤°жЬЙдїї дљХеѓєи±°дї§зЙМдљНдЇОйВ£дЄ™ж†УдЄ≠зЪДжЧґеАЩеРѓеК®гАВеЄ¶жЬЙеПѓйАЙиЊУеЗЇж†УзЪДеК®дљЬеПѓдї•жЙІи°МпЉМеєґдЄФеЬ®йВ£дЄ™ ж†УдЄ≠еПѓиГљдЄНдЇІеЗЇдїїдљХеѓєи±°дї§зЙМгАВе∞љзЃ°йВ£жШѓеЖЧдљЩзЪДпЉМдљЖSysMLи¶Бж±Вдљ†пЉМељУж†УзЪДе§ЪйЗНжАІ дЄЛйЩРжШѓйЫґзЪДжЧґеАЩпЉМ(еЬ®еРНзІ∞еЙН)дљњзФ® <optional>еЕГз±їеЮЛгАВ
6.2жіїеК®еПВжХ∞
жіїеК®еПВжХ∞жШѓеП¶дЄАзІНзЙєжЃКз±їеЮЛзЪДеѓєи±°иКВзВєгАВдљ†дЉЪжККеЃГйЩДеК†еИ∞жіїеК®еЫЊзЪДе§Цж°ЖдЄКпЉМдїОжАї дљУдЄКи°®з§ЇжіїеК®зЪДдЄАзІНиЊУдЇЇжИЦиАЕиЊУеЗЇгАВжіїеК®еПВжХ∞зЪДж†ЗиѓЖж≥ХжШѓж®™иЈ®еЬ®жіїеК®еЫЊе§Цж°ЖдЄКзЪДзЯ© 嚥пЉМе¶ВеЫЊ6.7жЙАз§ЇгАВжіїеК®еПВжХ∞зЪДеРНзІ∞е≠Чзђ¶дЄ≤зЪДж†ЉеЉПеТМеѓєи±°иКВзВє(дї•еПКж†У)зЫЄеРМгАВ
SysMLдЄНдЉЪжМЗеЃЪдљ†ењЕй°їеЬ®еЫЊе§Цж°ЖзЪДдїАдєИеЬ∞жЦєжФЊзљЃжіїеК®еПВжХ∞гАВзДґиАМпЉМдЄАзІНзЇ¶еЃЪдњЧжИР зЪДеїЇж®°жЦєж≥ХжШѓжККиЊУдЇЇжіїеК®еПВжХ∞жФЊеЬ®е§Цж°ЖзЪДй°ґйГ®жИЦиАЕеЈ¶иЊєпЉМиЊУеЗЇжіїеК®еПВжХ∞жФЊеЬ®еЇХйГ®жИЦиАЕ еП≥иЊєгАВдЇЛеЃЮдЄКпЉМеФѓдЄАиГље§ЯеСКиѓЙжИСдїђеМЇеИЂзЪДеЖ≥еЃЪжАІжЦєеЉПпЉМе∞±жШѓињЮжО•еЬ®жіїеК®еПВжХ∞дЄКзЪДиЊєзЉШ зЪДжЦєеРСгАВ
еТМж†Уз±їдЉЉпЉМжіїеК®еПВжХ∞иГље§ЯжЛ•жЬЙзЪДдљОе§ЪйЗНжАІжШѓ0гАВжАїзЪДжЭ•иѓіпЉМињЩжШѓдљ†е¶ВдљХдЄЇжіїеК®еїЇзЂЛдЄАзІНеПѓйАЙеПВжХ∞зЪДж®°еЮЛзЪДжЦєеЉПгАВеѓєдЇОеЄ¶жЬЙеПѓйАЙиЊУдЇЇжіїеК®еПВжХ∞зЪДжіїеК®(дЊЛе¶ВпЉЪ sensorSelection),еН≥дЊњеЬ®йВ£дЄ™еПВжХ∞дЄ≠ж≤°жЬЙдїїдљХеѓєи±°дї§зЙМпЉМеЃГдєЯеПѓдї•еРѓеК®гАВеЄ¶жЬЙеПѓйАЙиЊУ еЗЇжіїеК®еПВжХ∞зЪДжіїеК®(дЊЛе¶ВпЉЪerrorMsg)еПѓдї•жЙІи°МпЉМеєґеПѓиГљдЄНдЉЪйАЪињЗйВ£дЄ™еПВжХ∞еРСиІ¶еПСжії еК®зЪДеЃҐжИЈзЂѓињФеЗЇдЄ®дїїдљХеѓєи±°гАВеТМж†УдЄАж†ЈпЉМељУжіїеК®еПВжХ∞зЪДдљОе§ЪйЗНжАІжШѓйЫґзЪДжЧґеАЩпЉМSysML и¶Бж±Вдљ†еЬ®еЕґдєЛеЙН(еРНзІ∞еЙНйЭҐ)еЉХзФ® <optional>еЕГз±їеЮЛгАВ
йАЪињЗеЫЊ6.6еТМеЫЊ6.7дЄ≠зЪДдЊЛе≠РпЉМдљ†еПѓиГљдЉЪжО®жЦ≠еЗЇпЉМеЬ®ж†УеТМжіїеК®дєЛйЧіеПѓиГљдЉЪжЬЙеЕ≥иБФгАВ 6.8иКВдЉЪиЃ®иЃЇйВ£зІНеЕ≥иБФзЪДзїЖиКВгАВ
6.3жµБдЄОйЭЮжµБ
йїШиЃ§жГЕеЖµдЄЛпЉМеК®дљЬеТМжіїеК®еП™жЬЙеЬ®жЙІи°МзЪДжЧґеАЩжЙНдЉЪжґИиієеЃГдїђзЪДиЊУеЕ•еѓєи±°дї§зЙМгАВз±ї дЉЉеЬ∞пЉМеП™жЬЙеЬ®еЃМжИРжЙІи°МзЪДжЧґеАЩпЉМеЃГдїђжЙНдЉЪдЇ§дїШиЊУеЗЇеѓєи±°дї§зЙМгАВжИСдїђжККињЩеПЂеБЪйЭЮжµБ (nonstreaming)зЪДи°МдЄЇгАВ
зДґиАМпЉМдљ†жЙАиЃЊиЃ°еЗЇжЭ•зЪДз≥їзїЯи°МдЄЇдЄНдЉЪжАїжШѓе¶Вж≠§пЉМжЬЙжЧґеЃГдїђзФЪиЗ≥дЉЪеЬ®и°МдЄЇжМБзї≠жЙІи°М зЪДжЧґеАЩжО•еПЧиЊУдЇЇеТМдЇІзФЯиЊУеЗЇгАВжИСдїђжККињЩеПЂеБЪжµБ(streaming)и°МдЄЇгАВдљ†еПѓдї•еЬ®ж†УжИЦиАЕжії еК®еПВжХ∞зЪДеРНзІ∞е≠Чзђ¶дЄ≤еРОйЭҐжМЗеЃЪ[stream],дїОиАМдЄЇжµБи°МдЄЇеїЇж®°гАВ
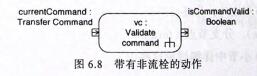
иЃ©жИСдїђй¶ЦеЕИзЬЛдЄАдЄЛйЭЮжµБзЪДжГЕеЖµгАВеЫЊ6.8жШЊз§ЇдЇЖдЄАдЄ™еК®дљЬпЉМеЃГеЄ¶жЬЙдЄАдЄ™йЭЮжµБ зЪДиЊУдЇЇж†Удї•еПКдЄАдЄ™йЭЮжµБзЪДиЊУеЗЇж†УгАВељУз±їеЮЛдЄЇдЉ†иЊУеСљдї§зЪДеѓєи±°дї§зЙМеИ∞иЊЊиЊУдЇЇж†У currentCommandзЪДжЧґеАЩпЉМеК®дљЬvcе∞±дЉЪеЉАеІЛжЙІи°МпЉМеєґжґИиієйВ£дЄ™еѓєи±°дї§зЙМгАВе¶ВжЮЬеЬ®vc ињШеЬ®жЙІи°МзЪДжЧґеАЩпЉМеПИжЬЙдЄАдЄ™дЉ†иЊУеСљдї§зЪДеЃЮдЊЛеИ∞иЊЊиЊУдЇЇж†УпЉМйВ£дєИзЫіеИ∞vcеЃМжИРзДґеРОеЖНжђ° еРѓеК®зЪДжЧґеАЩпЉМзђђдЇМдЄ™еЃЮдЊЛжЙНдЉЪ襀жґИиієгАВ
ељУvcжЙІи°МзЪДжЧґеАЩпЉМеЃГдЉЪеЬ®еЖЕйГ®зФЯжИРз±їеЮЛдЄЇBooleanзЪДеѓєи±°дї§зЙМпЉМдљЖжШѓеЬ®vcеЃМжИРжЙІи°МдєЛеЙНпЉМйВ£дЄ™еѓєи±°дї§зЙМйГљдЄНдЉЪ襀еПСйАБеИ∞иЊУеЗЇж†УisCommandValidдЄКгАВйВ£ж†ЈпЉМеЬ®vcеЃМжИРдєЛеЙНпЉМдїїдљХиЈЯйЪПvc (еєґдї•йВ£дЄ™BooleanеАЉдљЬдЄЇиЊУдЇЇ)зЪДеК®дљЬйГљдЄНдЉЪеЉАеІЛжЙІи°МгАВ
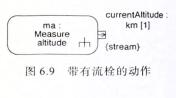
йВ£жШѓйЭЮжµБзЪДжГЕеЖµгАВзО∞еЬ®иЃ©жИСдїђзЬЛдЄАдЄЛжµБзЪДжГЕеЖµгАВеЫЊ6.9жШЊз§ЇдЇЖдЄАдЄ™еК®дљЬma,еЃГжЛ•жЬЙжµБиЊУеЗЇж†УcurrentAltitudeгАВељУmaжЙІи°МзЪДжЧґеАЩпЉМеЃГдЉЪеЬ®еЖЕйГ®зФЯжИРдЄАдЄ™з±їеЮЛдЄЇkmзЪДеѓєи±°дї§зЙМгАВйВ£дЄ™еѓєи±°дї§зЙМдЉЪеПСйАБеИ∞иЊУеЗЇж†УдЄКпЉМеН≥дЊњmaж≠£еЬ®жЙІи°МгАВињЩж†ЈпЉМиЈЯйЪПma (еєґи¶Бж±ВkmеАЉдљЬдЄЇиЊУдЇЇ)зЪДеК®дљЬйГљеПѓдї•еЉАеІЛжЙІи°МпЉМеН≥дЊњmaдїНзДґеЬ®жМБзї≠жЙІи°М(еєґеПѓиГљдЇІзФЯеЕґдїЦеѓє и±°дї§зЙМ)гАВињЩжШѓдЄЇдЄ§дЄ™жИЦе§ЪдЄ™еєґи°МеК®дљЬеїЇж®°зЪДдЄАзІНжЦєеЉПгАВжµБеЬ®еК®дљЬзЪДиЊУдЇЇзЂѓжЬЙзЭАз±їдЉЉзЪДжДПдєЙгАВеИ∞иЊЊжµБиЊУдЇЇж†УзЪДеѓєи±°дї§зЙМдЉЪй©ђдЄКдЄЇеК®дљЬжЙА зФ®пЉМеН≥дЊњеЃГзФ±дЇОдєЛеЙНеИ∞иЊЊзЪДеѓєи±°дї§зЙМеЈ≤зїПеЉАеІЛжЙІи°М
жµБеТМйЭЮжµБеЬ®жіїеК®еПВжХ∞зЪДжГЕеҐГдЄЛеТМеЬ®ж†УзЪДжГЕеЖµдЄЛжЬЙзЭАеРМж†ЈзЪДжДПдєЙпЉМеП™жШѓеЇФзФ®зїЩжіїеК® зЪДиІДеИЩжЬЙжЙАдЄНеРМгАВжµБж†УеТМжіїеК®еПВжХ∞иЃ©дљ†еПѓдї•еѓєжМБзї≠зЪДз≥їзїЯи°МдЄЇеїЇж®°гАВ
7гАБиЊє
жіїеК®еПѓдї•еМЕеРЂдЄ§зІНдЄАиИђз±їеЮЛзЪДеЕГзі†пЉЪиКВзВєеТМиЊєгАВдЄКдЄАиКВдїЛзїНдЇЖдЄ§зІНиКВзВєпЉЪеК®дљЬеТМ еѓєи±°иКВзВєгАВжЬђиКВдЉЪдїЛзїНдЄ§зІНиЊєпЉМдљ†еПѓдї•дљњзФ®еЃГдїђжЭ•ињЮжО•иКВзВєпЉМдїОиАМеЬ®жіїеК®дЄ≠嚥жИРжЬЙеЇП зЪДеЇПеИЧпЉЪеѓєи±°жµБеТМжОІеИґжµБгАВ
7.1еѓєи±°жµБ
еѓєи±°жµБжШѓдЄАзІНиЊєпЉМеЃГдЉЪдЉ†иЊУеѓєи±°дї§зЙМгАВдљњзФ®еѓєи±°жµБпЉМеПѓдї•и°®з§ЇдЇЛдїґгАБиГљйЗПжИЦиАЕ жХ∞жНЃзЪДеЃЮдЊЛйАЪињЗжіїеК®пЉМеЬ®з≥їзїЯжУНдљЬињЗз®ЛдЄ≠жіїеК®жЙІи°МзЪДжЧґеАЩпЉМдїОдЄАдЄ™иКВзВєеРСеП¶дЄАдЄ™иКВ зВєжµБеК®гАВ
еѓєи±°жµБзЪДж†ЗиѓЖж≥ХжШѓеЄ¶жЬЙзЃ≠е§ізЪДеЃЮзЇњгАВеѓєи±°жµБдЄАиИђдЉЪжККдЄ§дЄ™еѓєи±°иКВзВєињЮжО•еЬ®дЄАиµЈгАВ
дљЖжШѓпЉМйЩ§дЇЖеѓєи±°иКВзВєдєЛе§ЦпЉМдљ†ињШеПѓдї•еЬ®еѓєи±°жµБзЪДдЄАзЂѓжЛ•жЬЙеЖ≥еЃЪиКВзВє(decision node)гАБ еРИеєґиКВзВє(merge node)гАБеИЖжФѓиКВзВє(fork node)еТМжХіеРИиКВзВє(join node),жЭ•жМЗз§Їеѓєи±° дї§зЙМзЪДжµБгАВжИСдЉЪеЬ®6.9е∞ПиКВдЄ≠иѓ¶зїЖиЃ®иЃЇињЩдЇЫеЖЕеЃєгАВ
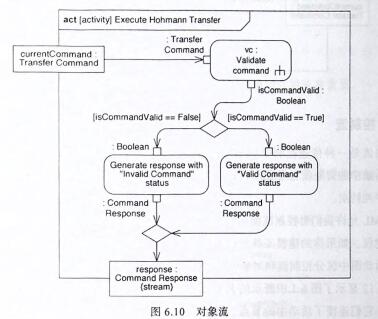
еЫЊ6.10жШЊз§ЇдЇЖдєЛеЙНеЬ®еЫЊ6.1дЄ≠жШЊз§ЇзЪДе§ІеЮЛжіїеК®еЫЊзЪДиКВйАЙйГ®еИЖгАВињЩдЄ™йГ®еИЖжШЊз§ЇдЇЖдЄГ дЄ™еѓєи±°жµБзЪДз§ЇдЊЛгАВеЃГдїђи°®з§ЇињЩдЄ™жіїеК®йГ®еИЖдЄ≠зЪДеК®дљЬйЬАи¶Беѓєи±°дљЬдЄЇиЊУдЇЇпЉМеєґдЄФдЉЪдЇІеЗЇеѓє и±°дљЬдЄЇиЊУеЗЇгАВ
дљ†ењЕй°їз°ЃдњЭеѓєи±°жµБдЄ§зЂѓзЪДеѓєи±°иКВзВєжЛ•жЬЙеЕЉеЃєзЪДз±їеЮЛпЉМеЬ®е∞ЊзЂѓдљЬдЄЇиЊУеЗЇдЇІзФЯзЪДеѓєи±° дї§зЙМењЕй°їеПѓдї•дљЬдЄЇзЃ≠е§ізЂѓзЪДиЊУ䯯襀жО•еПЧгАВдљ†еПѓдї•дї•дЄЛйЭҐдЄ§зІНжЦєеЉПдєЛдЄАжЭ•жї°иґ≥ињЩзІНзЇ¶жЭЯпЉЪ
вЦ°з±їеЮЛеПѓдї•жШѓзЫЄеРМзЪД(е¶ВеЫЊ6.10жЙАз§Ї)
вЦ°дЄКжЄЄзЪДз±їеЮЛеПѓдї•жШѓдЄЛжЄЄз±їеЮЛзЪДе≠Рз±їеЮЛ(е¶ВеЫЊ6.11жЙАз§Ї)
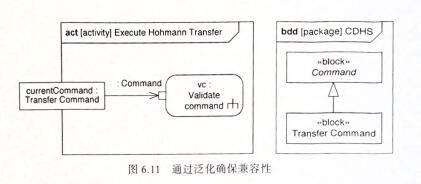
еЫЊ6.11дЄ≠зЪДжіїеК®еЫЊзЙЗжЃµжШЊз§ЇдЇЖеЫЊ6.10дЄ≠жШЊз§ЇзЪДи°МдЄЇзЪДеПШзІНгАВTransfer Command жШѓCommandзЪДе≠Рз±їеЮЛ(ж≠£е¶ВеЃГдїђдєЛйЧізЪДж≥ЫеМЦеЕ≥з≥їжЙАдЉ†иЊЊзЪДпЉМйВ£зІНеЕ≥з≥їжШЊз§ЇеЬ®BDD дЄ≠)гАВиАМж≥ЫеМЦеЕ≥з≥їи°®з§ЇжЬЙеПѓзљЃжНҐжАІ(жДПеС≥зЭАеЬ®йЬАи¶БиґЕз±їзЪДеЬ∞жЦєпЉМе≠Рз±їйГљдЉЪ襀жО•еПЧ)гАВ еК®дљЬvcйЬАи¶БCommandз±їеЮЛзЪДиЊУеЕ•гАВеЫ†ж≠§еЃГдЉЪжО•еПЧеЃГжЙАжЬЙзЪДе≠Рз±їеЮЛпЉМеМЕжЛђTransfer CommandзЪДеЃЮдЊЛгАВ
ињЩжШѓйТИеѓєжКљи±°иЃЊиЃ°зЪДдЊЛе≠Р(дЊЛе¶ВпЉЪCommand)гАВдљ†еЇФиѓ•еѓєињЩзІНеЃЮиЈµжДЯиІЙиЙѓе•љпЉМеЃГ еЬ®дљ†зЪДз≥їзїЯиЃЊиЃ°дЄ≠еИЫеїЇдЇЖеПѓжЙ©е±ХжАІпЉМеѓєдЇОзФЯеСљеС®жЬЯдЄ≠з®НеРОдЄНеПѓйБњеЕНзЪДеПШжЫіжЭ•иѓіпЉМйВ£дЉЪ е∞ПеМЦжИРжЬђгАВ
7.2жОІеИґжµБ
жОІеИґжµБжШѓдЄАзІНдЉ†йАТжОІеИґдї§зЙМзЪДиЊєгАВжОІеИґдї§зЙМзЪДеИ∞иЊЊеПѓдї•)пЉМвАШдЄ®еК®з≠ЙеЊЕеЃГзЪДеК®дљЬгАВеЫ† ж≠§пЉМељУжіїеК®дЄ≠зЪДеѓєи±°жµБиЗ™иЇЂжЧ†ж≥ХдЉ†иЊЊеЇПеИЧзЪДжЧґеАЩ.дљ†дЉЪдљњзФ®жОІеИґжµБжЭ•и°®з§ЇдЄАз≥їеИЧеК®дљЬ дєЛйЧізЪДеЇПеИЧзЇ¶жЭЯгАВ
SysMLеЕБиЃЄжИСдїђеѓєжОІеИґжµБдљњзФ®дЄ§зІНж†ЗиѓЖж≥ХпЉЪеЄ¶жЬЙзЃ≠е§ізЪДиЩЪзЇњ.жИЦиАЕеЄ¶жЬЙзЃ≠е§ізЪДеЃЮ зЇњгАВжИСеїЇиЃЃпЉМе¶ВжЮЬдљ†зЪДеїЇж®°еЈ•еЕЈжФѓжМБиЩЪзЇњзЪДж†ЗиѓЖж≥ХпЉМйВ£дєИе∞±дљњзФ®еЃГпЉЪйВ£ж†ЈпЉМзЬЛеЫЊиАЕеЊИ еЃєжШУеЬ®жіїеК®еЫЊдЄ≠еМЇеИЖжОІеИґжµБеТМеѓєи±°жµБгАВ
еЫЊ6.12жШЊз§ЇдЇЖеЫЊ6.1дЄ≠жЙАз§ЇзЪДе§ІеЮЛжіїеК®еЫЊзЪДдЄАйГ®еИЖгАВињЩдЄ™йГ®еИЖжШЊз§ЇдЇЖ 7дЄ™жОІеИґжµБ зЪДз§ЇдЊЛпЉМеЃГдїђињЮжО•дЇЖжіїеК®дЄ≠зЪДиКВзВєпЉМдї•еЃЪдєЙеЃГдїђдєЛйЧіжОТеЇПзЪДеЇПеИЧпЉЪйВ£дЇЫиКВзВєдЄ≠пЉМжЬЙеЫЫ дЄ™жШѓеК®дљЬпЉЪдЄ§дЄ™и∞ГзФ®и°МдЄЇеК®дљЬгАБдЄАдЄ™з≠ЙеЊЕжЧґйЧіеК®дљЬдї•еПКдЄАдЄ™жО•еПЧдЇЛдїґеК®дљЬ(6.8иКВдЉЪ иѓ¶зїЖиЃ®иЃЇзЙєеЃЪзЪДеК®дљЬз±їеЮЛ)гАВељУдЄАдЄ™еК®дљЬеЃМжИРжЧґпЉМеЃГе∞±дЉЪеЬ®иЊУеЗЇзЪДжОІеИґжµБдЄ≠жПРдЊЫжОІеИґ дї§зЙМпЉМйВ£дЉЪеРѓеК®еЇПеИЧдЄ≠зЪДдЄЛдЄАдЄ™еК®дљЬгАВ
8гАБеЖНжђ°йШРињ∞еК®дљЬ
жЧҐзДґдљ†еЈ≤зїПдЄЂиІ£дЇЖеѓєи±°иКВзВєеТМиЊєпЉМиЃ©жИСдїђзЬЛдЄЛпЉМеЕ≥дЇОеК®дљЬдљ†ињШйЬАи¶БзЯ•йБУеУ™дЇЫеЖЕ еЃєгАВиЃ©жИСдїђзЬЛдЄЛеК®дљЬдїАдєИжЧґеАЩеЉАеІЛпЉМеєґиЃ®иЃЇеЫЫзІНзЙєеИЂз±їеЮЛзЪДеК®дљЬпЉЪи∞ГзФ®и°МдЄЇеК®дљЬгАБеПС йАБдњ°еПЈеК®дљЬгАБжО•еПЧдїґеК®дљЬдї•еПКз≠ЙеЊЕжЧґйЧіеК®дљЬгАВ
8.1еК®дљЬдљХжЧґеЉАеІЛ
дЄЇдЇЖж≠£з°ЃеЬ∞иІ£йЗКеєґеИЫеїЇжіїеК®еЫЊпЉМзЯ•йБУеК®дљЬдїАдєИжЧґеАЩдЉЪеЉАеІЛйЭЮеЄЄйЗНи¶БгАВдЄАдЄ™еК®дљЬжГ≥ и¶БеРѓеК®.йЬАи¶Бжї°иґ≥дЄАдЄ™жЭ°дїґгАВ
вЦ°жЛ•иЛїеК®дљЬзЪДжіїеК®ж≠£еЬ®жЙІи°МгАВ
вЦ°еЬ®жЙАеЖЗиЊУдЇЇзЪДжОІеИґжµБдЄКйГљжЬЙжОІеИґдї§зЙМеИ∞иЊЊгАВ
вЦ°еЬ®жЙАжЬЙиЊУеЕ•зЪДеѓєи±°жµБдЄКйГљжЬЙиґ≥е§ЯжХ∞йЗПзЪДеѓєи±°дї§зЙМеИ∞иЊЊпЉМдї•жї°иґ≥зЫЄеЇФиЊУдЇЇж†УзЪД дљОе§ЪйЗНжАІгАВ
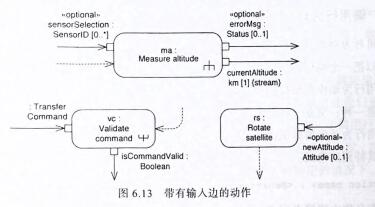
иЃ©жИСдїђеЬ®еЗ†дЄ™з§ЇдЊЛеК®дљЬзЪДжГЕеҐГдЄ≠зЬЛзЬЛињЩдЇЫиІДеИЩпЉМе¶ВеЫЊ6.13жЙАз§ЇгАВ
еК®дљЬm aжЛ•жЬЙдЄАдЄ™иЊУдЇЇзЪДжОІеИґжµБеТМдЄАдЄ™иЊУдЇЇзЪДеѓєи±°жµБгАВеѓєи±°жµБйЩДзЭАеЬ®иЊУдЇЇж†У sensorSelectionдЄКпЉМеЃГзЪДдљОе§ЪйЗНжАІжШѓйЫґгАВеЫ†ж≠§ињЩдЄ™еК®дљЬеЬ®иЊУдЇЇзЪДжОІеИґжµБдЄКжЬЙжОІеИґдї§ зЙМзЪДжЧґеАЩе∞±еРѓеК®пЉМдЄНзЃ°еЬ®ж†УsensorSelectionдЄКжШѓеР¶жЬЙеѓєи±°дї§зЙМгАВ
еК®дљЬvcжЛ•жЬЙдЄАдЄ™иЊУдЇЇзЪДжОІеИґжµБеТМдЄАдЄ™иЊУдЇЇзЪДеѓєи±°жµБгАВеѓєи±°жµБйЩДзЭАеЬ®дЄАдЄ™иЊУеЕ•ж†У дЄКпЉМиАМеЃГйЬАи¶БTransfer Commandз±їеЮЛзЪДеѓєи±°дї§зЙМгАВеЬ®ињЩдЄ™ж†УдЄКж≤°жЬЙжШЊдЄНдїїдљХе§ЪйЗНжАІгАВ еЫ†ж≠§еЃГзЪДе§ЪйЗНжАІжШѓйїШиЃ§зЪД1..1гАВињЩжДПеС≥зЭАпЉМељУдЄАдЄ™жОІеИґдї§зЙМеТМдЄАдЄ™еѓєи±°дї§зЙМеИЖеИЂеИ∞иЊЊ зЫЄеЇФзЪДиЊУдЇЇиЊєжЧґпЉМињЩдЄ™еК®дљЬе∞±дЉЪеРѓеК®гАВињЩдЇЫдї§зЙМдЄНйЬАи¶Б(дєЯдЄН姙еПѓиГљ)еРМжЧґеИ∞иЊЊгАВзДґиАМпЉМжГ≥и¶БиЃ©еК®дљЬеРѓеК®пЉМдЄ§дЄ™дї§зЙМйГљењЕй°їеЗЇзО∞еЬ®иЊУдЇЇиЊєдЄКгАВ
еК®дљЬrsжЛ•жЬЙдЄАдЄ™иЊУдЇЇзЪДеѓєи±°жµБпЉМеЃГйЩДзЭАеЬ®иЊУдЇЇж†УnewAttitudeдЄКгАВињЩдЄ™иЊУеЕ•ж†УжШѓ еПѓйАЙзЪДпЉМеЃГзЪДе∞Пе§ЪйЗНжАІжШѓйЫґгАВињЩдЄ™еК®дљЬдЄНйЬАи¶БдїїдљХдї§зЙМ(дїїдљХз±їеЮЛ)е∞±иГљеРѓеК®гАВеЬ® ињЩзІНжГЕеЖµдЄЛпЉМеП™и¶Бжї°иґ≥дЄЙзІНжЭ°дїґдЄ≠зЪДзђђдЄАдЄ™;еП™и¶БжЛ•жЬЙеЃГзЪДжіїеК®еЉАеІЛжЙІи°МпЉМињЩдЄ™еК®дљЬ е∞±дЉЪеРѓеК®гАВ
еїЇж®°иАЕеЬ®зїШеИґжіїеК®еЫЊзЪДжЧґеАЩпЉМеЄЄиІБзЪДйФЩиѓѓжШѓеРСдЄАдЄ™еК®дљЬзїШеИґе§ЪдЄ™иЊУдЇЇиЊєпЉМдї•и°® иЊЊйАЪеРСйВ£дЄ™еК®дљЬзЪДдЄНеРМиЈѓеЊДгАВдїЦдїђйФЩиѓѓеЬ∞зЫЄдњ°е§ЪжЭ°иЊУдЇЇиЊєдєЛйЧідЄЇвАЬжИЦвАЭињРзЃЧгАВж≠£е¶Вдљ† 'зО∞еЬ®жЙАзЯ•йБУзЪДпЉМињЩеЕґеЃЮжШѓвАЬдЄОвАЭињРзЃЧгАВжЙАдї•иѓЈж≥®жДПеЬ®дљ†еРСеЈ±зЪДжіїеК®еЫЊдЄ≠жЯ•жЙЊињЩж†ЈзЪДйФЩ иѓѓ;ињЩжШѓеЊИеЃєжШУзКѓзЪДйФЩиѓѓгАВе¶ВжЮЬдљ†йЬАи¶БеѓєйАЪеРСзЙєеЃЪеК®дљЬзЪДеПѓйАЙиЈѓеЊДеїЇж®°пЉМе∞±ењЕй°їеЬ®жії еК®дєЛеЙНжПТдЇЇдЄАдЄ™еРИеєґиКВзВє(жЫіе§ЪеЖЕеЃєдЉЪеЬ®6.9.4иКВдЄ≠иЃ®иЃЇ)гАВ
дљ†ињШи¶БзЯ•йБУпЉМеК®дљЬеПѓдї•дЄНйЬАи¶БдїїдљХиЊУдЇЇиЊєгАВеЬ®йВ£зІНжГЕеЖµдЄЛпЉМдљ†и°®иЊЊзЪДжШѓеК®дљЬдЄНдЉЪ з≠ЙеЊЕдїїдљХиЊУдЇЇдї§зЙМ;еЃГдЉЪеЬ®жіїеК®еРѓеК®зЪДжЧґеАЩеРѓеК®гАВе¶ВжЮЬеЬ®жіїеК®дЄ≠жЬЙе§ЪдЄ™ж≤°жЬЙдїїдљХиЊУеЕ• иЊєзЪДеК®дљЬпЉМйВ£дєИе∞±дЉЪеРМжЧґеРѓеК®гАВ
8.2и∞ГзФ®и°МдЄЇеК®дљЬ
и∞ГзФ®и°МдЄЇеК®дљЬжШѓдЄАзІНзЙєеЃЪзЪДеК®дљЬпЉМеЃГдЉЪеЬ®еРѓзФ®зЪДжЧґеАЩиІ¶еПСеП¶дЄАзІНи°МдЄЇгАВи∞ГзФ®и°МдЄЇ еК®дљЬеПѓдї•жККдЄАдЄ™йЂШе±Вжђ°зЪДи°МдЄЇеИЖиІ£жИРдЄАз≥їеИЧдљОе±Вжђ°зЪДи°МдЄЇгАВ
и∞ГзФ®и°МдЄЇеК®дљЬдЉЪж†єжНЃеИЪеИЪиЃ®иЃЇзЪДзЫЄеРМиІДеИЩеРѓеК®гАВеЃГжЙАи∞ГзФ®зЪДи°МдЄЇеПѓдї•жШѓдї•дЄЛдЄЙзІН дЄ≠зЪДдїїжДПдЄАзІНпЉЪдЇ§дЇТгАБзКґжАБжЬЇжИЦиАЕеЕґдїЦжіїеК®гАВ
и∞ГзФ®и°МдЄЇеК®дљЬзЪДж†ЗиѓЖж≥ХеТМеК®дљЬзЪДж†ЗиѓЖж≥ХзЫЄеРМвАФвАФеЬЖиІТзߩ嚥вАФвАФеП™жШѓеЕґдЄ≠зЪДеРНзІ∞е≠Ч зђ¶дЄ≤жЬЙеЕґзЙєеИЂзЪДж†ЉеЉПпЉЪ
еК®дљЬеРНзІ∞зФ±еїЇж®°иАЕеЃЪдєЙгАВи°МдЄЇеРНзІ∞ењЕй°їеТМдљ†еЬ®ж®°еЮЛе±ВзЇІеЕ≥з≥їдЄ≠жЯРе§ДеЃЪдєЙзЪДдЇ§дЇТгАБ зКґжАБжЬЇжИЦиАЕжіїеК®зЪДеРНзІ∞еМєйЕНгАВ
еЫЊ6.13дЄ≠жЙАз§ЇзЪДдЄЙзІНеК®дљЬйГљжШѓи∞ГзФ®и°МдЄЇеК®дљЬгАВдљ†дЉЪеПСзО∞Measure altitudeгАБ Validate Commandдї•еПКRotate satelliteжШѓеЬ®з≥їзїЯж®°еЮЛдЄ≠еЃЪдєЙзЪДдЄЙзІНи°МдЄЇзЪДеРНзІ∞пЉМжЙАдї• дљ†еПѓдї•еБЪеЗЇдЄКињ∞зїУиЃЇгАВи∞ГзФ®и°МдЄЇеК®дљЬ(еГПmaеТМvc)зЪДеП≥дЄЛиІТеЗЇзО∞еИЖжФѓзђ¶еПЈпЉМ谮积襀 и∞ГзФ®зЪДи°МдЄЇ(Measure altitudeгАБValidate Command)жШѓдЄАзІНжіїеК®гАВж≤°жЬЙйВ£зІНзђ¶еПЈзЪДи∞Г зФ®и°МдЄЇеК®дљЬ(еГПrs)жШѓж®°з≥КзЪД;襀и∞ГзФ®зЪДи°МдЄЇ(Rotate satellite)еПѓиГљжШѓдЄАзІНдЇ§дЇТпЉМдєЯ еПѓиГљжШѓдЄАзІНзКґжАБжЬЇгАВе∞љзЃ°ињЩдєИиѓіпЉМдљЖжШѓеїЇж®°иАЕеЊИе∞СдљњзФ®и∞ГзФ®и°МдЄЇеК®дљЬжЭ•иІ¶еПСзКґжАБжЬЇгАВ
еЫЊ6.14жШЊз§ЇдЇЖеРНдЄЇopen telemetry streamзЪДи∞ГзФ®и°МдЄЇеК®дљЬдЊЛе≠РпЉМеЃГдЉЪиІ¶еПСи°МдЄЇ Stream telemetry dataгАВеИЖжФѓзђ¶еПЈи°®з§ЇStream telemetry dataжШѓдЄАзІНжіїеК®гАВињЩзІНи∞ГзФ®и°М дЄЇеК®дљЬжЬЙдЄАдЄ™еРНдЄЇframeзЪДиЊУеЗЇж†УпЉМжМБжЬЙз±їеЮЛдЄЇTransfer FrameзЪДеѓєи±°дї§зЙМгАВеЫ†дЄЇињЩ дЄ™ж†УжШѓдЄАзІНжµБж†У(streaming pin)пЉМеЫ†ж≠§еѓєи±°дї§зЙМеПѓдї•дїОи∞ГзФ®зЪДжіїеК®дЄ≠еЗЇзО∞пЉМеєґдЄЇињЩдЄ™ж†УжЙАзФ® зїЩ1гАБжЄЄеК®дљЬжґИиіє еН≥дЊњжШѓеЬ®Stream telemetry dataж≠£еЬ®жЙІи°МзЪДжЧґеАЩгАВеЫ†ж≠§пЉМињЩдЄ™еК®дљЬеПѓдї•еЬ®дЄАжђ°жЙІи°МзЪДињЗз®ЛдЄ≠дЇІзФЯе§ЪдЄ™з±їеЮЛдЄЇTransfer FrameзЪДеѓєи±°дї§зЙМгАВ
ељУи∞ГзФ®и°МдЄЇеК®дљЬиІ¶еПСеП¶дЄАдЄ™жіїеК®зЪДжЧґеАЩпЉМи∞ГзФ®и°МдЄЇеК®дљЬзЪДж†УењЕй°їдЄОжЙАи∞ГзФ®жіїеК®зЪДжіїеК®еПВжХ∞еМєйЕНгАВеЫЊ6.15жШЊз§ЇдЇЖ Stream telemetry dataжіїеК®зЪДеЃЪдєЙпЉМеЃГжЛ•жЬЙдЄАдЄ™иЊУеЗЇзЪДжіїеК®еПВжХ∞пЉМдЄОеЫЊ6.14дЄ≠жШЊз§ЇзЪДиЊУеЗЇж†УзЫЄеМєйЕНгАВдЄАжЧ¶ињЩдЄ™жіїеʮ襀貶еПСпЉМеЃГе∞±дЉЪжМБзї≠еЬ∞жККз±їеЮЛдЄЇSource PacketзЪДеѓєи±°дї§зЙМдїОе§ЪдЄ™жХ∞жНЃжЇРиљђжНҐеИ∞з±їеЮЛдЄЇTransfer FrameзЪДеНХдЄ™еѓєи±°дї§зЙМжµБдЄ≠гАВељУжѓПдЄ™еѓєи±°дї§зЙМеИ∞иЊЊиЊУеЗЇжіїеК®еПВжХ∞frameзЪДжЧґеАЩпЉМе∞±дЉЪй©ђдЄК襀䊆йАТеИ∞и∞ГзФ®и°МдЄЇеК®дљЬopen telemetry streamзЫЄеЇФзЪДиЊУеЗЇж†УдЄКгАВ
дљ†еПѓдї•дљњзФ®и∞ГзФ®и°МдЄЇеК®дљЬињЫи°МйЗНжЮДпЉМжККеЗЇзО∞еЬ®е§ЪдЄ™еЬ∞жЦєзЪДйАЪзФ®еКЯиГљеЭЧжКљеПЦеЗЇжЭ•пЉМеЬ®еНХзЛђзЪДи°МдЄЇдЄ≠еЃЪдєЙеЃГпЉМзДґеРОдљ†еП™йЬАи¶Бе§Ъжђ°и∞ГзФ®еЃГгАВињЩзІНиЃЊиЃ°еЃЮиЈµдЉЪиЃ©жИСдїђжЫіжШУдЇОйЗНзФ®йВ£дЇЫйАЪзФ®зЪДдљОе±Вжђ°и°МдЄЇгАВдЊЛе¶ВпЉМStream telemetry dataжіїеК®еМЕеРЂдЄЙдЄ™и∞ГзФ®и°МдЄЇеК®дљЬпЉМеЃГдїђйГљдЉЪиІ¶еПСCreate virtual channel frameи°МдЄЇгАВйВ£дЄ™и°МдЄЇеП™еЃЪдєЙдЇЖдЄАжђ°(еЬ®ж®°еЮЛе±ВзЇІеЕ≥з≥їдЄ≠зЪДжЯРе§ДеЃЪдєЙдЄЇжіїеК®)пЉМиАМеЬ®ињЩйЗМжЙІи°МдЇЖе§Ъжђ°гАВ(еЬ®ињЩзІНзЙєеЃЪзЪДжГЕеЖµдЄЛпЉМйВ£дЄЙжђ°еНХзЛђзЪДжЙІи°Меєґи°МеПСзФЯгАВ)
8.3еПСйАБдњ°еПЈеК®дљЬ
дЄЇдЇЖжї°иґ≥еПѓдЉЄзЉ©жАІеТМжАІиГљзЪДи¶Бж±ВпЉМз≥їзїЯеЈ•з®ЛеЄИзїПеЄЄдЉЪиЃЊиЃ°еИЖеЄГеЉПеТМеєґеПСзЪДз≥їзїЯгАВ
ињЩж†ЈзЪДз≥їзїЯдЉЪдљњзФ®еєґеПСжЬЇеИґжЭ•дЉ†йАТдЇЛдїґгАБиГљйЗПеТМжХ∞жНЃпЉМеєґеРМж≠•йВ£дЇЫдї•еєґи°МзЪДжЦєеЉПжУНдљЬзЪДеРДзІНеК®дљЬгАВдљ†еПѓдї•дљњзФ®еПСйАБдњ°еПЈеК®дљЬеТМжО•еПЧдЇЛдїґеК®дљЬпЉМеЬ®жіїеК®еЫЊдЄКдЄЇињЩзІНз±їеЮЛзЪДз≥їзїЯи°МдЄЇеїЇж®°гАВ
еПСйАБдњ°еПЈжіїеК®жШѓдЄАзІНзЙєеЃЪз±їеЮЛзЪДеК®дљЬпЉМеРѓзФ®зЪДжЧґеАЩдЉЪеЉВж≠•еЬ∞зФЯжИРдњ°еПЈеЃЮдЊЛпЉМеєґжККеЃГеПСйАБеИ∞зЫЃзЪДеЬ∞гАВеПСйАБдњ°еПЈеК®дљЬдЉЪж†єжНЃ6.8.1иКВдЄ≠иЃ®иЃЇзЪДеРМж†ЈиІДеИЩеРѓеК®гАВ
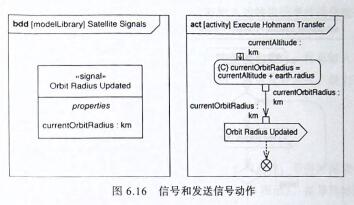
еПСйАБдњ°еПЈеК®дљЬзЪДж†ЗиѓЖж≥Хж؃嚥зКґз±їдЉЉдЇОиЈѓж†ЗзЪДдЇФ茺嚥(е¶ВеЫЊ6.16жіїеК®еЫЊдЄ≠дЄЛеНКйГ®еИЖ жЙАз§ЇеЬ®еПСйАБдњ°еПЈеК®дљЬ(дЊЛе¶ВпЉЪ Orbit Radius Updated)еЖЕйГ®жШЊз§ЇзЪДе≠Чзђ¶дЄ≤ењЕй°їдЄОеЬ® ж®°еЮЛе±ВзЇІеЕ≥з≥їжЯРе§ДеЃЪдєЙзЪДдњ°еПЈзЪДеРНзІ∞зЫЄеМєйЕНгАВ
иЃ©жИСдїђеЫЮй°ЊдЄАдЄЛзђђ3зЂ†дЄ≠зЪДеЖЕеЃєпЉМеЕґдЄ≠жПРеИ∞дњ°еПЈжШѓдЄАзІНж®°еЮЛеЕГзі†гАВеТМж®°еЭЧдЄА ж†ЈпЉМдњ°еПЈеПѓдї•жЛ•жЬЙе±ЮжАІгАВйВ£дЇЫе±ЮжАІдЄАиИђдЉЪдї£и°®дњ°еПЈеЃЮдЊЛдїОеПСйАБжЦєеИ∞зЫЃж†ЗжЦєдЉ†йАТзЪДжХ∞ жНЃгАВеЫЊ6.16дЄ≠зЪДBDDжШЊз§ЇдЇЖ Orbit Radius Updatedдњ°еПЈгАВињЩдЄ™дњ°еПЈжЛ•жЬЙдЄАдЄ™е±ЮжАІпЉЪ currentOrbitRadius,еЃГзЪДз±їеЮЛжШѓkmгАВеЫ†ж≠§ињЩдЄ™дњ°еПЈзЪДеЃЮдЊЛеПѓдї•жРЇеЄ¶дїОеПСйАБжЦєеИ∞зЫЃж†З жЦєзЪДдЄАдЄ™kmеАЉгАВ
еЫЊ6.16дЄ≠зЪДжіїеК®еЫЊжШЊз§ЇдЇЖеЫЊ6.1дЄ≠жЙАз§ЇзЪДExecute Hohmann TransferжіїеК® зЪДдЄАйГ®еИЖпЉМињЩйГ®еИЖйЗНзВєеЬ®дЇОеПСйАБдњ°еПЈеК®дљЬгАВељУињЩдЄ™еПСйАБдњ°еПЈеК®дљЬеРѓеК®зЪДжЧґеАЩдЄА дєЯе∞±жШѓеЬ®иЊУдЇЇж†УдЄ≠жЬЙиЊУдЇЇзЪДеѓєи±°дї§зЙМеИ∞иЊЊжЧґвАФвАФеЃГе∞±дЉЪеЉВж≠•еЬ∞зФЯжИРOrbit Radius Updatedдњ°еПЈзЪДеЃЮдЊЛпЉМжККcurrentOrbitRadiusеАЉдЉ†йАБзїЩз≠ЙеЊЕеЃГзЪДзЫЃж†ЗжЦєгАВеЫ†дЄЇеПСйАБ дњ°еПЈеК®дљЬжШѓеЉВж≠•зЪДпЉМжЙАдї•дЄНдЉЪз≠ЙеЊЕжЭ•иЗ™зЫЃж†ЗжЦєзЪДеЫЮеЇФ;еЃГдЉЪзЂЛеН≥еЃМжИРпЉМеєґеЬ®иЊУеЗЇ иЊєжПРдЊЫдЄАдЄ™жОІеИґдї§зЙМгАВжѓПељУжЦ∞зЪДеѓєи±°дї§зЙМеИ∞иЊЊеЕґиЊУеЕ•ж†УзЪДжЧґеАЩпЉМеПСйАБдњ°еПЈеК®дљЬйГљ дЉЪеРѓеК®гАВ
8.4жО•еПЧдЇЛдїґеК®дљЬ
жО•еПЧдЇЛдїґеК®дљЬеЬ®еЉВж≠•и°МдЄЇдЄ≠жШѓеПСйАБдњ°еПЈеК®дљЬзЪДе•љжР≠ж°£;жО•еПЧдЇЛдїґеК®дљЬжШѓеЬ®жіїеК®дЄ≠ дљњзФ®зЪДеЕГзі†пЉМеЃГи°®з§ЇжіїеК®еЬ®зїІзї≠жЙІи°МдєЛеЙНпЉМењЕй°їз≠ЙеЊЕеПСзФЯдЄАдЄ™еЉВж≠•зЪДдЇЛдїґгАВдЄАиИђжГЕеЖµ дЄЛпЉМињЩдЄ™еЉВж≠•дЇЛдїґжШѓжО•жФґдњ°еПЈеЃЮдЊЛгАВ
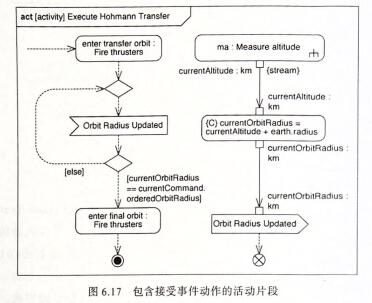
жО•еПЧдЇЛдїґеК®дљЬзЪДж†ЗиѓЖж≥ХжШѓдЄАдЄ™дЇФ茺嚥пЉМзЬЛиµЈжЭ•еГПжШѓдЄАдЄ™зߩ嚥зЪДдЄАиЊєжЬЙдЄАдЄ™дЄЙиІТ嚥 зЪДжІљ(е¶ВеЫЊ6.17дЄ≠жіїеК®еЫЊзЪДеЈ¶дЄ≠йГ®жЙАз§Ї)гАВжШЊз§ЇеЬ®жО•еПЧдЇЛдїґеК®дљЬдЄ≠зЪДе≠Чзђ¶дЄ≤(дЊЛе¶ВпЉЪ Orbit Radius Updated)йАЪеЄЄдЉЪдЄОдљ†еЬ®ж®°еЮЛе±ВзЇІеЕ≥з≥їжЯРе§ДеЃЪдєЙзЪДдњ°еПЈеРНзІ∞зЫЄеМєйЕНпЉМи°®з§Ї жО•еПЧдЇЛдїґеК®дљЬдЉЪз≠ЙеЊЕйВ£дЄ™дњ°еПЈзЪДеЃЮдЊЛпЉМиАМиѓ•еЃЮдЊЛдЉЪеЉВж≠•еИ∞иЊЊгАВеЃГеИ∞иЊЊпЉМжО•еПЧдЇЛдїґеК®дљЬ е∞±дЉЪеЃМжИРпЉМжОІеИґжµБдЉЪеЙНињЫеИ∞жіїеК®дЄ≠зЪДдЄЛдЄАдЄ™иКВзВєгАВ
еЫЊ6.17жШЊз§ЇдЇЖеЫЊ6.1дЄ≠жЙАз§ЇзЪДExecute Hohmann TransferжіїеК®зЪДдЄАйГ®еИЖгАВињЩдЄ™йГ® еИЖеЕ≥ж≥®еПСзФЯеЬ®дЄ§дЄ™еєґи°МжОІеИґжµБдєЛйЧіпЉМиіѓз©њиѓ•жіїеК®зЪДеЉВж≠•йАЪдњ°гАВеєґеПСзЪДжµБдЉЪеИЖеИЂзЛђиЗ™ињЫ и°МпЉМдљЖжЬЙжЧґеЃГдїђеЬ®и°МдЄЇзЪДзЙєеЃЪжЧґйЧізВєењЕй°їжШѓеЉВж≠•зЪДгАВ
еЬ®ињЩдЄ™дЊЛе≠РдЄ≠пЉМељУжОІеИґдї§зЙМеИ∞иЊЊжО•еПЧдЇЛдїґеК®дљЬзЪДиЊУдЇЇжОІеИґжµБжЧґпЉМеЃГе∞±дЉЪеРѓеК®пЉМиАМ йВ£жШѓеЬ®enter transfer orbitеК®дљЬеЃМжИРдєЛеРОжЙНдЉЪеПСзФЯзЪДдЇЛжГЕгАВе¶ВжЮЬеП≥дЊІзЪДеПСйАБдњ°еПЈеК®дљЬ еЈ≤зїПзФЯжИРдЇЖдЄАдЄ™Orbit Radius Updatedдњ°еПЈеЃЮдЊЛпЉМйВ£дєИжО•еПЧдЇЛдїґеК®дљЬдЉЪзЂЛеН≥еЃМжИРпЉМеєґ еЬ®еЃГзЪДиЊУеЗЇжОІеИґжµБдЄ≠жПРдЊЫжОІеИґдї§зЙМпЉМзДґеРОжЙІи°МдЉЪињЫи°МеИ∞дЄЛдЄАдЄ™иКВзВєгАВ
еП¶дЄАжЦєйЭҐпЉМе¶ВжЮЬеП≥дЊІзЪДеПСйАБдњ°еПЈеК®дљЬеєґж≤°жЬЙзФЯжИРOrbit Radius Updatedдњ°еПЈеЃЮ дЊЛпЉМйВ£дєИжО•еПЧдЇЛдїґеК®дљЬе∞±дЉЪз≠ЙеЊЕOrbit Radius Updatedдњ°еПЈеЃЮдЊЛ;Execute Hohmann TransferеК®дљЬеЬ®иѓ•дњ°еПЈеЃЮдЊЛзФЯжИРдєЛеЙНйГљжЧ†ж≥ХињЫи°МеИ∞enter final orbitеК®дљЬгАВ
еТМеЕґдїЦз±їеЮЛзЪДеК®дљЬдЄАж†ЈпЉМжО•еПЧдЇЛдїґеК®дљЬеєґдЄНйЬАи¶БдїїдљХиЊУеЕ•иЊєгАВиАМ6.8.1иКВдЄ≠зЪДиІД еИЩе£∞жШОпЉМеѓєдЇОж≤°жЬЙиЊУдЇЇиЊєзЪДеК®дљЬжЭ•иѓіпЉМеП™и¶БжіїеК®еЉАеІЛжЙІи°МпЉМеЃГе∞±дЉЪеРѓеК®гАВеЬ®ињЩжЦєйЭҐжО•
еПЧдЇЛдїґеК®дљЬдєЯдЄНдЊЛе§ЦпЉМеП™и¶БжіїеК®еЉАеІЛжЙІи°МпЉМж≤°жЬЙиЊУдЇЇиЊєзЪДжО•еПЧдЇЛдїґеК®дљЬе∞±дЉЪеРѓеК®пЉМеєґ еЉАеІЛзЫСеРђдњ°еПЈеЃЮдЊЛгАВ
зДґиАМпЉМињЩйЗМжЬЙдЄАзВєеМЇеИЂпЉЪеН≥дЊњеЬ®зђђдЄАдЄ™дњ°еПЈеЃЮдЊЛеИ∞иЊЊдєЛеРОпЉМж≤°жЬЙиЊУдЇЇиЊєзЪДжО•еПЧдЇЛ дїґеК®дљЬдєЯдЉЪдњЭжМБжЬЙжХИпЉМеЃГдЉЪзїІзї≠зЫСеРђеЕґдїЦдњ°еПЈеЃЮдЊЛгАВйАЪињЗињЩзІНжЦєеЉПпЉМжИСдїђеПѓдї•дЄЇжМБзї≠ еУНеЇФеЉВж≠•дЇЛдїґзЪДз≥їзїЯи°МдЄЇеїЇж®°гАВ
8.5з≠ЙеЊЕжЧґйЧіеК®дљЬ
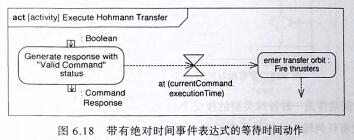
з≠ЙеЊЕжЧґйЧідЇЛдїґеПСзФЯзЪДжО•еПЧдЇЛдїґеК®дљЬдєЯеПЂеБЪз≠ЙеЊЕжЧґйЧіеК®дљЬгАВз≠ЙеЊЕжЧґйЧіеК®дљЬзЪДж†ЗиѓЖж≥Х жШѓдЄАдЄ™ж≤ЩжЉП嚥зКґзЪДзђ¶еПЈпЉМдЄЛйЭҐжЬЙжЧґйЧіи°®иЊЊеЉП(е¶ВеЫЊ6.18жЙАз§Ї)гАВеЬ®з≠ЙеЊЕжЧґйЧіеК®дљЬеТМеЕґ дїЦжО•еПЧдЇЛдїґеК®дљЬдєЛйЧіпЉМеМЇеИЂдїЕеЬ®дЇОж†ЗиѓЖж≥ХеТМдЇЛдїґзЪДз±їеЮЛдЄНеРМ;еЬ®дЄКдЄАиКВдЄ≠еПЩињ∞зЪДеЕґдїЦ дЄАеИЗйГљеѓєз≠ЙеЊЕжЧґйЧіеК®дљЬйАВзФ®гАВ
ж≤ЩжЉПдЄЛйЭҐзЪДжЧґйЧіи°®иЊЊеЉПеПѓдї•жМЗеЃЪзїЭеѓєжЧґйЧідЇЛдїґпЉМдєЯеПѓдї•жМЗеЃЪзЫЄеѓєжЧґйЧідЇЛдїґгАВзїЭ еѓєжЧґйЧідЇЛдїґи°®иЊЊеЉПдї•еЕ≥йФЃе≠ЧatеЉАеІЛвАФвАФдЊЛе¶ВпЉЪat ( 1430 GMT)жИЦat ( 14 NOV 2106, 1200 CST)жИЦat ( transferStartTime)гАВзЫЄеѓєжЧґйЧідЇЛдїґи°®иЊЊеЉПдї•еЕ≥йФЃе≠ЧafterеЉАеІЛпЉМ дЊЛе¶ВпЉЪafter ( 30 days)жИЦ aftw ( 50ms)жИЦ after (timerCount)гАВ
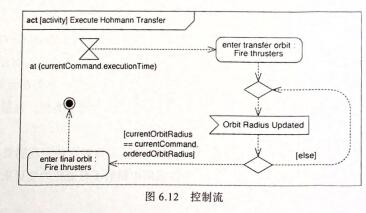
еЫЊ6.18дЄ≠жШЊз§ЇзЪДжіїеК®зЙЗжЃµжШѓеЫЊ6.1дЄ≠жШЊз§ЇзЪДExecute Hohmann TransferжіїеК®зЪД дЄАйГ®еИЖгАВињЩдЄ™йГ®еИЖдЄУж≥®дЇОжіїеК®дЄ≠зЪДз≠ЙеЊЕжЧґйЧіеК®дљЬпЉМеЃГдЉЪз≠ЙеЊЕдЄАдЄ™зїЭеѓєжЧґйЧідЇЛдїґеЉВж≠•еПС зФЯгАВжЧґйЧідЇЛдїґзЪДзЙєеЃЪеАЉдЉЪжФЊзљЃеЬ®executionTimeеАЉе±ЮжАІдЄ≠гАВеЬ®жЧґйЧіи°®иЊЊеЉПдЄ≠дљњзФ®зВєж†З иѓЖж≥Хи°®з§ЇexecutionTimeеАЉе±ЮжАІеµМдЇЇеЬ®currentCommandеѓєи±°дЄ≠гАВ
ељУжОІеИґдї§зЙМеИ∞иЊЊињЩдЄ™з≠ЙеЊЕжЧґйЧіеК®дљЬзЪДиЊУдЇЇжОІеИґжµБ(дЄКжЄЄеК®дљЬеЃМжИРпЉМзФЯжИРдЇЖжЬЙжХИзЪД еСљдї§еУНеЇФ)пЉМеЃГе∞±дЉЪеРѓеК®гАВе¶ВжЮЬзїЭеѓєжЧґйЧідЇЛдїґ(зФ±executionTimeжМЗеЃЪ)еЈ≤зїПеПСзФЯпЉМйВ£ дєИз≠ЙеЊЕжЧґйЧіеК®дљЬе∞±дЉЪзЂЛеИїеЃМжИРпЉМеєґеЬ®еЕґиЊУеЗЇжОІеИґжµБдЄ≠жПРдЊЫжОІеИґдї§зЙМгАВињЩж†ЈжЙІи°МињЗз®Ле∞± дЉЪеЙНињЫеИ∞дЄЛдЄАдЄ™иКВзВєгАВе¶ВжЮЬexecutionTimeињШж≤°жЬЙеЗЇзО∞пЉМйВ£дєИз≠ЙеЊЕжЧґйЧіеК®дљЬе∞±дЉЪз≠ЙеЊЕжЧґйЧідЇЛдїґзЪДеПСзФЯгАВExecute Hohmann TransferжіїеК®еЬ®йВ£дЄ™жЧґеИїеПСзФЯдєЛеЙНпЉМйГљжЧ†ж≥ХеЙНињЫ еИ∞ enter transfer orbit еК®дљЬгАВ
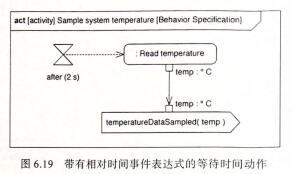
е¶ВжЮЬз≠ЙеЊЕжЧґйЧіеК®дљЬжЛ•жЬЙзЫЄеѓєжЧґйЧідЇЛдїґи°®иЊЊеЉП(е¶ВеЫЊ6.19жЙАз§Ї)йВ£дєИдЄАжЧ¶з≠ЙеЊЕжЧґйЧі еК®дљЬеРѓеК®пЉМжЧґйЧідЇЛдїґзЪДжЧґйТЯе∞±дЉЪеЉАеІЛиЃ°жЧґгАВеЫ†дЄЇињЩйЗМжШЊз§ЇзЪДз≠ЙеЊЕжЧґйЧіеК®дљЬж≤°жЬЙдїїдљХиЊУ дЇЇиЊєпЉМжЙАдї•еЬ®Sample system temperatureеЉАеІЛжЙІи°МзЪДжЧґеАЩпЉМеЃГе∞±дЉЪеРѓеК®гАВдЄ§зІТдєЛеРОпЉМ зЫЄеѓєжЧґйЧідЇЛдїґеПСзФЯпЉМз≠ЙеЊЕжЧґйЧіеК®дљЬдЉЪеЬ®еЕґиЊУеЗЇжОІеИґжµБдЄ≠жПРдЊЫжОІеИґдї§зЙМпЉМеРѓеК®дЄЛжЄЄзЪДи∞Г зФ®и°МдЄЇеК®дљЬпЉМиАМеЃГдЉЪи∞ГзФ®Read temperatureи°МдЄЇгАВ
з≠ЙеЊЕжЧґйЧіеК®дљЬжШѓдЄАзІНзЙєжЃКз±їеЮЛзЪДжО•еПЧдЇЛдїґеК®дљЬгАВеН≥дЊњеЬ®жЙАйЬАи¶БзЪДдЇЛдїґзђђдЄАжђ°еПСзФЯ дєЛеРОпЉМдєЯж≤°жЬЙдїїдљХиЊУдЇЇиЊєзЪДжО•еПЧдЇЛдїґеК®дљЬињШдЉЪдњЭжМБжЬЙжХИгАВеЫ†ж≠§пЉМеЬ®еЫЊ6.19дЄ≠жШЊз§ЇзЪД з≠ЙеЊЕжЧґйЧіеК®дљЬдЉЪзїІзї≠жѓПдЄ§зІТиЊУеЗЇдЄАдЄ™жОІеИґдї§зЙМ(еєґиІ¶еПСRead temperatureи°МдЄЇ)пЉМзЫіеИ∞ Sample system temperatureжіїеК®зїИж≠ҐгАВињЩдЄ™дЊЛе≠РиѓіжШОдЇЖе¶ВдљХдЄЇжМБзї≠зЪДеС®жЬЯжАІи°МдЄЇеїЇж®°гАВ
9гАБжОІеИґиКВзВє
жЬђзЂ†еЈ≤зїПиЃ®иЃЇдЇЖиГље§ЯеЬ®жіїеК®дЄ≠е≠ШеЬ®зЪДдЄ§зІНз±їеЮЛиКВзВєпЉЪеК®дљЬиКВзВєеТМеѓєи±°иКВзВєгАВзО∞еЬ® иЃ©жИСдїђзЬЛдЄЛеРОдЄАзІНиКВзВєпЉЪжОІеИґиКВзВєгАВдљњзФ®жОІеИґиКВзВєпЉМеПѓдї•еЉХеѓЉжіїеК®ж≤њзЭАиЈѓеЊДжЙІи°М, иАМдЄНеП™жШѓзЃАеНХзЪДеЇПеИЧеК®дљЬгАВжОІеИґиКВзВєжЧҐеПѓдї•жМЗеЉХжіїеК®дЄ≠жОІеИґдї§зЙМзЪДжµБпЉМдєЯеПѓдї•жМЗеЉХжії еК®дЄ≠еѓєи±°дї§зЙМзЪДжµБгАВ
жОІеИґиКВзВєжЬЙ7зІНз±їеЮЛпЉЪеИЭеІЛиКВзВєгАБжіїеК®зїИиКВзВєгАБжµБзїИиКВзВєгАБеЖ≥еЃЪиКВзВєгАБеРИеєґ иКВзВєгАБеИЖжФѓиКВзВєеТМйЫЖеРИиКВзВєгАВељУзДґпЉМеПѓдї•дљњзФ®ињЩдЇЫиКВзВєзЪДзїДеРИпЉМеЬ®жіїеК®дЄ≠еЃЪдєЙдїїжДПе§Н жЭВзЪДжОІеИґйАїиЊСпЉМдї•жї°иґ≥з≥їзїЯеКЯиГљйЬАж±ВгАВ
иЃ©жИСдїђжЭ•зЬЛдЄЛжѓПзІНиКВзВєжШѓе¶ВдљХеЈ•дљЬзЪДгАВ
9.1еИЭеІЛиКВзВє
еИЭеІЛиКВзВєж†ЗиЃ∞жіїеК®зЪДиµЈзВєгАВж≠£еЉПзЪДиѓіж≥ХжШѓпЉМеЃГж†ЗиЃ∞дЇЖжіїеК®дЄ≠зЪДдЄАдЄ™дљНзљЃпЉМжОІеИґдї§зЙМ зЪДжµБдЉЪдїОйВ£йЗМеЉАеІЛгАВеИЭеІЛиКВзВєзЪДж†ЗиѓЖж≥ХжШѓjе∞ПзЪДеЃЮењГеЬЖ嚥пЉМеЃГдЄАиИђеП™жЬЙдЄАдЄ™иЊУеЗЇжОІеИґжµБгАВ
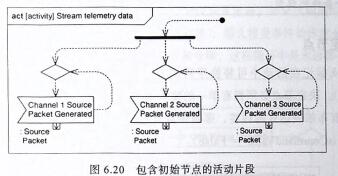
еЫЊ6.20дЄ≠жШЊз§ЇзЪДжіїеК®зЙЗжЃµжШѓдєЛеЙНеЬ®еЫЊ6.15дЄ≠жШЊз§ЇзЪДжіїеК®Stream telemetry data зЪДдЄАйГ®еИЖгАВињЩдЄ™зЙЗжЃµеЕ≥ж≥®дЄЙдЄ™еєґеПСзЪДжіїеК®еЇПеИЧзЪДеРѓеК®пЉМеЃГдїђйГљдїОеЫЊй°ґйГ®зЪДеИЭеІЛиКВзВєеЉА еІЛгАВељУStream telemetry dataжіїеК®еЉАеІЛзЪДжЧґеАЩпЉМдЉЪеЬ®ињЩдЄ™еИЭеІЛиКВзВєдЄКжФЊзљЃдЄАдЄ™жОІеИґдї§ зЙМгАВеЃГдЉЪй©ђдЄКжККиЊУеЗЇжОІеИґжµБиљђжНҐдЄЇеИЖжФѓиКВзВєпЉМзДґеРОжіїеК®дЉЪзїІзї≠жЙІи°МгАВ(6.9.5иКВдЉЪиѓ¶зїЖ иЃ®иЃЇеИЖжФѓиКВзВєгАВ)
дєЯеПѓиГљеѓєи±°дї§зЙМжµБжЬђиЇЂе∞±иґ≥дї•еЬ®жіїеК®дЄ≠еЃЪдєЙж≠£з°ЃзЪДеК®дљЬеЇПеИЧгАВеѓєи±°дї§зЙМдЄАиИђдЉЪдїОиЊУдЇЇ зЪДжіїеК®еПВжХ∞(еЬ®жіїеК®еЫЊзЪДе§Цж°ЖдЄК)еЉАеІЛгАВеЬ®ињЩж†ЈзЪДжГЕеЖµдЄЛпЉМдљ†дЄНйЬАи¶БеЬ®жіїеК®дЄ≠жЬЙеИЭеІЛиКВзВєгАВ
9.2жµБзїИиКВзВєеТМжіїеК®зїИиКВзВє
жµБзїИиКВзВєеТМжіїеК®зїИиКВзВєжШѓж†ЗиЃ∞жОІеИґдї§зЙМжµБзїУжЭЯзЪДжОІеИґиКВзВєгАВзДґиАМпЉМдЇМиАЕдєЛйЧі жЬЙжШОжШЊзЪДеМЇеИЂпЉЪељУжОІеИґдї§зЙМеИ∞иЊЊжµБзїИиКВзВєзЪДжЧґеАЩпЉМйВ£дЄ™дї§зЙМдЉЪ襀йФАжѓБпЉМдї•ж≠§ж†ЗиЃ∞еНХ зЛђдЄАдЄ™жОІеИґжµБзЪДзїУжЭЯгАВиАМељУжОІеИґдї§зЙМеИ∞иЊЊжіїеК®зїИиКВзВєзЪДжЧґеАЩпЉМжХідЄ™жіїеК®йГљдЉЪзїУжЭЯпЉМ дї•ж≠§ж†ЗиЃ∞жЙАжЬЙжОІеИґжµБзЪДзїУжЭЯ(дЄНзЃ°еЃГдїђељУеЙНжШѓеР¶ињШеЬ®жЙІи°МдЄ≠)гАВ
жµБзїИиКВзВєзЪДж†ЗиѓЖж≥ХжШѓеМЕеРЂXзЪДеЬЖ嚥гАВжіїеК®зїИиКВзВєзЪДж†ЗиѓЖж≥ХжШѓеМЕеРЂе∞ПзЪДеЃЮењГеЬЖ ељҐзЪДеЬЖ嚥гАВ(дєЛеЙНе±ХзО∞зЪД)еЫЊ6.17жШЊз§ЇдЇЖињЩдЄ§зІНиКВзВєзЪДдЊЛе≠РгАВ
еЫЊ6.17дЄ≠жШЊз§ЇзЪДдЄ§дЄ™еК®дљЬеЇПеИЧдЉЪеєґи°МжЙІи°МгАВи∞ГзФ®и°МдЄЇеК®дљЬmaдЉЪеЬ®еЕґиЊУеЗЇж†УдЄКдї•жµБзЪД嚥еЉПжМБзї≠иЊУеЗЇеѓєи±°дї§зЙМпЉМmaдЄЛжЄЄзЪДдЄ§дЄ™еК®дљЬеПѓиГљдЉЪеЫ†ж≠§жЙІи°Ме§Ъжђ°гАВжѓПжђ°еПСйАБдњ° еПЈеК®дљЬеЃМжИРзЪДжЧґеАЩпЉМе∞±дЉЪеЗЇзО∞дЄАдЄ™жОІеИґдї§зЙМпЉМеИ∞иЊЊжµБзїИиКВзВєпЉМ庴襀йФАжѓБгАВжіїеК®дЄ≠ еЕґдїЦдї§зЙМйГљдЄНдЉЪеПЧеИ∞ељ±еУНгАВExecute Hohmann TransferжіїеК®дЉЪзїІзї≠пЉМзЫіеИ∞enter final orbitеК®дљЬеЃМжИРпЉМеєґиЊУеЗЇдЄАдЄ™жОІеИґдї§зЙМпЉМеЃГдЉЪеИ∞иЊЊжіїеК®зїИиКВзВєгАВйВ£жЧґпЉМжХідЄ™жіїеК®йГљ дЉЪзїИж≠Ґ(еН≥дЊњжіїеК®maињШеЬ®иЊУеЗЇеѓєи±°дї§зЙМ)гАВ
9.3еЖ≥еЃЪиКВзВє
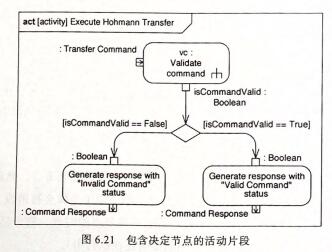
еЖ≥еЃЪиКВзВєж†ЗиЃ∞еЬ®жіїеК®дЄ≠еПѓжЫњжНҐеЇПеИЧзЪДеЉАеІЛгАВеЕґж†ЗиѓЖж≥ХжШѓдЄАдЄ™з©ЇењГзЪДиϱ嚥(е¶В еЫЊ6.21жЙАз§Ї)гАВеЖ≥еЃЪиКВзВєењЕй°їжЛ•жЬЙеНХдЄАзЪДиЊУеЕ•иЊєпЉМдЄАиИђжЛ•жЬЙдЄ§дЄ™жИЦе§ЪдЄ™иЊУеЗЇиЊєгАВжѓПдЄ™ иЊУеЗЇиЊєдЉЪеЄ¶жЬЙеЄГе∞Фи°®иЊЊеЉПзЪДж†Зз≠ЊпЉМйВ£еПЂеБЪзЫСеРђпЉМжШЊз§ЇдЄЇжЦєжЛђеПЈдЄ≠йЧізЪДе≠Чзђ¶дЄ≤(дЊЛе¶ВпЉМ еЫЊ6.21 дЄ≠зЪД isCommandValid == False)гАВ
ељУдЄАдЄ™дї§зЙМвАФвАФеПѓиГљжШѓеѓєи±°дї§зЙМпЉМдєЯеПѓиГљжШѓжОІеИґдї§зЙМвАФвАФеИ∞иЊЊеЖ≥еЃЪиКВзВєзЪДжЧґеАЩ, иЊУеЗЇиЊєзЪДзЫСеРђдЉЪ襀дЉ∞еАЉгАВдї§зЙМдЉЪжПРдЊЫзїЩйВ£жЧґзЫСеРђдЉ∞еАЉдЄЇзЬЯзЪДиЊУеЗЇиЊєгАВ
дљ†жЬЙиі£дїїз°ЃдњЭиЊУеЗЇиЊєдЄКзЪДз≥їеИЧзЫСеРђеЃМжХідЄФзЛђзЂЛпЉМдїОиАМз°ЃдњЭжѓПжђ°дї§зЙМеИ∞иЊЊзЪДжЧґеАЩ,еП™жЬЙдЄАдЄ™зЫСеРђзЪДеАЉдЉЪжШѓзЬЯгАВSysMLеЕБиЃЄдљ†дљњзФ®elseдљЬдЄЇ(е§Ъ)дЄАдЄ™иЊУеЗЇиЊєзЪДзЫСеРђпЉМдї• з°ЃдњЭжї°иґ≥вАЬеЃМжХівАЭзЪДж†ЗеЗЖгАВ(е¶ВжЮЬжЙАжЬЙеЕґдїЦзЫСеРђзЪДдЉ∞еАЉйГљжШѓеБЗпЉМйВ£дєИelseзЪДдЉ∞еАЉе∞±жШѓзЬЯгАВ)
9.4еРИеєґиКВзВє
еРИеєґиКВзВєж†ЗиЃ∞жіїеК®дЄ≠еПѓйАЙеЇПеИЧзЪДзїУе∞ЊгАВеЕґж†ЗиѓЖж≥ХеТМеЖ≥еЃЪиКВзВєзЫЄеРМпЉЪз©ЇењГиϱ嚥гАВдљ† еПѓдї•йАЪињЗиЊУдЇЇиЊєеТМиЊУеЗЇиЊєзЪДжХ∞йЗПжЭ•еМЇеИЖеЃГдїђ;еРИеєґиКВзВєжЛ•жЬЙдЄ§жЭ°жИЦе§ЪжЭ°иЊУдЇЇиЊєпЉМиАМеП™ жЛ•жЬЙдЄАдЄ™иЊУеЗЇиЊєгАВељУдЄАдЄ™дї§зЙМвАФвАФеПѓиГљжШѓеѓєи±°дї§зЙМпЉМдєЯеПѓиГљжШѓжОІеИґдї§зЙМвАФвАФйАЪињЗдїїжДП дЄАжЭ°иЊУеЕ•иЊєеИ∞иЊЊеРИеєґиКВзВєпЉМдї§зЙМй©ђдЄКе∞±дЉЪжПРдЊЫзїЩиЊУеЗЇиЊєгАВ
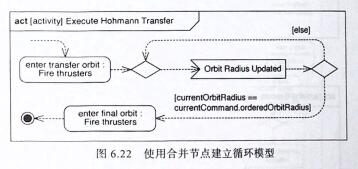
еЄЄиІБзЪДжГЕеЖµжШѓпЉМеРИеєґиКВзВєеТМеЖ≥еЃЪиКВзВєзїДеРИдљњзФ®пЉМеЬ®жіїеК®дЄ≠еѓєеЊ™зОѓеїЇж®°(е¶ВеЫЊ6.22 жЙАз§Ї)гАВдЇЛеЃЮдЄКпЉМеРИеєґиКВзВєеѓєдЇОеїЇзЂЛеЊ™зОѓж®°еЮЛжЭ•иѓійЭЮеЄЄйЗНи¶БгАВе¶ВжЮЬињЩеєЕеЫЊдЄ≠зЪДеРИеєґиКВзВє 襀еИ†йЩ§(еЃГзЪДдЄ§жЭ°иЊУеЕ•иЊєзЫіжО•дЄОжО•еПЧдЇЛдїґеК®дљЬињЮжО•)пЉМйВ£дєИжО•еПЧдЇЛдїґеК®дљЬе∞±ж∞ЄињЬйГљдЄНдЉЪеРѓ еК®гАВдЄЇдЇЖеЉАеІЛпЉМеЃГйЬАи¶БеЬ®жѓПжЭ°иЊУдЇЇиЊєдЄКйГљжЬЙжОІеИґдї§зЙМпЉМињЩеЬ®еЊ™зОѓдЄ≠жШѓж∞ЄињЬйГљдЄНдЉЪеПСзФЯзЪДгАВ
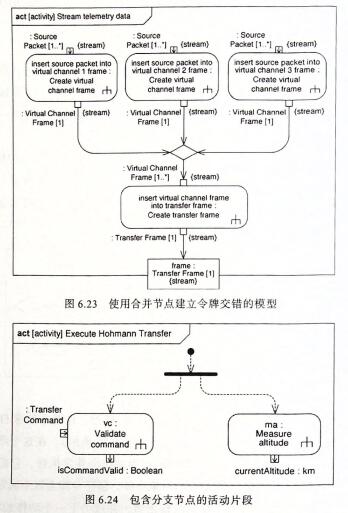
дљ†ињШеПѓдї•дљњзФ®еРИеєґиКВзВєжЭ•еїЇзЂЛдї§зЙМдЇ§йФЩжГЕеЖµзЪДж®°еЮЛпЉМињЩдЇЫдї§зЙМжЭ•иЗ™е§ЪдЄ™еєґеПСзЪД жЭ•жЇРпЉМдљ†йЬАи¶БжККеЃГдїђеРИеєґеИ∞еНХдЄАзЪДиЊУеЗЇжµБдЄ≠(е¶ВеЫЊ6.23жЙАз§Ї)гАВеЬ®ињЩдЄ™жіїеК®дЄ≠?иІ¶еПС Create virtual channel frameжіїеК®зЪДдЄЙдЄ™и∞ГзФ®и°МдЄЇеК®дљЬдЉЪеєґеПСжЙІи°МгАВеЃГдїђдЉЪдї•ељЉж≠§зЛђ зЂЛеЬ∞иЊУеЗЇз±їеЮЛдЄЇVirtual Channel FrameзЪДеѓєи±°дї§зЙМпЉМйВ£дЇЫдї§зЙМдЉЪдї•дЄНз°ЃеЃЪзЪДй°ЇеЇПеИ∞иЊЊ еРИеєґиКВзВєгАВжѓПдЄ™дї§зЙМеИ∞иЊЊеРОдЉЪй©ђдЄКжПРдЊЫзїЩиЊУеЗЇиЊєпЉМеєґжИРдЄЇдЄЛдЄАдЄ™еК®дљЬзЪДиЊУеЕ•гАВзДґеРОпЉМ йВ£дЄ™еК®дљЬдЉЪиЊУеЗЇз±їеЮЛдЄЇTransfer FrameзЪДеНХдЄ™еѓєи±°дї§зЙМжµБгАВ
9.5 еИЖжФѓиКВзВє
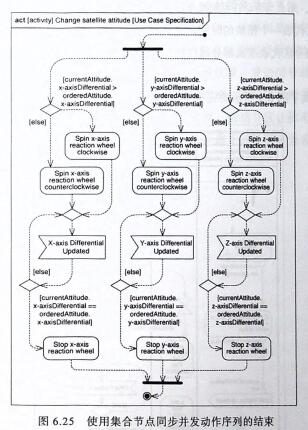
еИЖжФѓиКВзВєж†ЗиЃ∞жіїеК®дЄ≠еєґеПСеЇПеИЧзЪДиµЈзВєгАВеИЖжФѓиКВзВєзЪДж†ЗиѓЖж≥ХжШѓдЄАжЭ°зЇњжЃµ(жЦєеРС йЪПжДП)пЉМеЃГењЕй°їжЛ•жЬЙдЄАжЭ°иЊУдЇЇиЊєеТМдЄ§жЭ°жИЦе§ЪжЭ°иЊУеЗЇиЊє(е¶ВеЫЊ6.24жЙАз§Ї)гАВељУдЄАдЄ™дї§ зЙМвАФвАФеПѓиГљжШѓеѓєи±°дї§зЙМпЉМдєЯеПѓиГљжШѓжОІеИґдї§зЙМвАФвАФеИ∞иЊЊеИЖжФѓиКВзВєзЪДжЧґеАЩпЉМеЃГдЉЪ襀е§НеИґеИ∞жЙАжЬЙиЊУеЗЇиЊєдЄКгАВеОЯеІЛдї§зЙМзЪДжѓПдЄ™еЙѓжЬђйГљдї£и°®зЛђзЂЛгАБеєґеПСгАБж≤њзЭАеРДиЗ™иЈѓеЊДеЙНињЫзЪДжОІеИґжµБгАВ
еЫЊ6.24дЄ≠жШЊдЄНзЪДжіїеК®зЙЗжЃµжШѓдєЛеЙНеЫЊ6.1дЄ≠жЙАз§ЇзЪДExecute Hohmann TransferжіїеК®зЪДдЄА йГ®еИЖгАВињЩдЄ™йГ®еИЖеЕ≥ж≥®жіїеК®дЄ≠зЪДеИЖжФѓиКВзВєгАВжОІеИґдї§зЙМеИ∞иЊЊеИЖжФѓиКВзВєеРОдЉЪ襀е§НеИґеИ∞дЄ§жЭ°иЊУеЗЇ иЊєдЄКгАВзДґеРОйВ£дЄ§дЄ™еЙѓжЬђдЉЪеРСеЙНжЙІи°МеИ∞еРДиЗ™зЪДдЄЛжЄЄжіїеК®vcеТМmaдЄКгАВеК®дљЬmaдЉЪй©ђдЄКеРѓеК®пЉМ еЃГдЄНдЉЪз≠ЙеЊЕдїїдљХеЕґдїЦиЊУдЇЇгАВиАМеК®дљЬvcдЉЪеЬ®з±їеЮЛдЄЇTransfer CommandзЪДеѓєи±°дї§зЙМеИ∞иЊЊеЕґ иЊУдЇЇж†УзЪДжЧґеАЩеРѓеК®гАВеРѓеК®зЪДжЧґйЧіжї°иґ≥дЄАеЃЪжЭ°дїґжЧґпЉМдЄ§дЄ™еК®дљЬеПѓиГљеЬ®дЄАжЃµжЧґйЧіеЖЕеєґи°МжЙІи°МгАВ еЕ≥дЇОеєґеПСеЊИйЗНи¶БзЪДдЄАзВєжШѓпЉМеєґеПСеК®дљЬеЃМжИРзЪДй°ЇеЇПжШѓдЄНз°ЃеЃЪзЪДгАВдљ†жЧ†ж≥ХдЇЛеЕИзЯ•йБУпЉМеЬ®з≥їзїЯжУНдљЬзЙєеЃЪзЪДExecute Hohraann TransferжіїеК®дЄ≠пЉМvcеТМmaеУ™дЄАдЄ™дЉЪй¶ЦеЕИеЃМжИРгАВ жЫіеЗЖз°ЃзЪДиѓіж≥ХжШѓпЉМеУ™дЄ™еЕИеЃМжИРж≤°дїАдєИеЕ≥з≥їпЉМеП™жЬЙеЬ®еЃГдїђељЉж≠§дєЛйЧіж≤°жЬЙдЊЭиµЦеЕ≥з≥їзЪДжЧґ еАЩпЉМдљ†жЙНиГљжККеК®дљЬеїЇзЂЛдЄЇеєґеПСзЪДж®°еЮЛгАВ
9.6йЫЖеРИиКВзВє
йЫЖеРИиКВзВєж†ЗiеЈ±жіїеК®дЄ≠еєґеПСеЇПеИЧзЪДзїУжЭЯгАВйЫЖеРИиКВзВєзЪДж†ЗиѓЖж≥ХеТМеИЖжФѓиКВзВєдЄАж†ЈпЉЪдЄАжЭ° зЇњжЃµгАВдљ†еПѓдї•йАЪињЗиЊУдЇЇгАБиЊУеЗЇиЊєзЪДжХ∞йЗПжЭ•еМЇеИЖеЃГдїђ;йЫЖеРИиКВзВєдЄАиИђжЛ•жЬЙдЄ§жЭ°жИЦе§ЪжЭ°иЊУ дЇЇиЊєпЉМиАМеП™жЬЙдЄАжЭ°иЊУеЗЇиЊє(е¶ВеЫЊ6.25дЄ≠жіїеК®еЫЊзЪДеЇХйГ®жЙАз§Ї)гАВ
дљ†еПѓдї•дљњзФ®йЫЖеРИиКВзВєдЄЇжіїеК®дЄ≠еєґеПСеК®дљЬеЇПеИЧзЪДеРМж≠•зВєеїЇж®°гАВељУдї§зЙМеИ∞иЊЊжѓПжЭ°иЊУеЕ• иЊєзЪДжЧґеАЩпЉМе∞±дЉЪжЬЙеНХдЄ™дї§зЙМжПРдЊЫзїЩиЊУеЗЇиЊєгАВеєґеПСеЇПеИЧзїУжЭЯпЉМдЄАжЭ°жОІеИґжµБдЉЪйАЪињЗйЫЖеРИиКВ зВєжЙАж†ЗиЃ∞зЪДзВєпЉМзїІзї≠жЙІи°МгАВ
10гАБжіїеК®еИЖеМЇпЉЪжККи°МдЄЇеИЖйЕНзїЩзїУжЮД
жіїеК®еЫЊдЄНдїЕеПѓдї•дЉ†иЊЊжіїеК®дЄ≠еК®дљЬзЪДй°ЇеЇПпЉМиАМдЄФињШеПѓдї•дЉ†иЊЊжЙІи°МжѓПдЄ™еК®дљЬзЪДзїУжЮДгАВ дљ†еПѓдї•дљњзФ®жіїеК®еИЖеМЇжЭ•и°®з§ЇгАВжіїеК®еИЖеМЇзЪДж†ЗиѓЖж≥ХжШѓдЄАдЄ™е§Ізߩ嚥(еМЕеРЂдЄАдЄ™жИЦе§ЪдЄ™иКВ зВє)пЉМеЬ®дЄАзЂѓжЬЙе§ійГ®еЖЕеЃє;е§ійГ®еЖЕеЃєдЉЪжМЗеЃЪжіїеК®еИЖеМЇдї£и°®дїАдєИгАВжіїеК®еИЖеМЇзЪДжЦєеРСеПѓиГљ жШѓж∞іеє≥зЪДпЉМдєЯеПѓиГљжШѓеЮВзЫізЪДпЉМдљЖжШѓжЯРдЇЫеїЇж®°еЈ•еЕЈеПѓиГљеП™жФѓжМБеЕґдЄ≠дЄАзІНжЦєеРСгАВ
жіїеК®еИЖеМЇеЄЄиІБзЪДжГЕеЖµдЄЛдЉЪдї£и°®е≠ШеЬ®дЇОз≥їзїЯж®°еЮЛжЯРе§ДзЪДдЄАдЄ™ж®°еЭЧжИЦиАЕдЄАдЄ™зїДжИРйГ®еИЖ е±ЮжАІгАВеЬ®жіїеК®еИЖеМЇдЄ≠жФЊзљЃдЄАдЄ™еК®дљЬи°®з§Їиѓ•еК®дљЬ襀еИЖйЕНзїЩдЄАдЄ™еРНзІ∞зФ±е§іеУ•;еЖ≥еЃЪзЪДжЮД,пЉЪе¶ВжЮЬ еП™жШѓзЃАеНХеЬ∞жФЊзљЃпЉМйВ£дєИељУжіїеК®еЬ®з≥їзїЯжУНдљЬињЗз®ЛдЄ≠жЙІи°МзЪДжЧґеАЩпЉМзїУжЮДе∞±дЉЪиіЯиі£жЙІи°МйВ£дЄ™еК®дљЬгАВ
ељУжіїеК®еИЖеМЇдї£и°®дЄАдЄ™ж®°еЭЧзЪДжЧґеАЩпЉМеЃГи°®з§ЇйВ£дЄ™ж®°еЭЧзЪДжЙАжЬЙеЃЮдЊЛйГљиГље§ЯжЙІи°МеЕґдЄ≠еМЕеРЂ зЪДеК®дљЬгАВељУжіїеК®еИЖеМЇдї£и°®зїДжИРйГ®еИЖе±ЮжАІзЪДжЧґеАЩпЉМйВ£дєИеП™жШѓйВ£дЄ™зїДжИРйГ®еИЖе±ИжАІдЉЪиіЯиі£жЙІи°М жЙАеМЕеРЂзЪДеК®дљЬгАВ
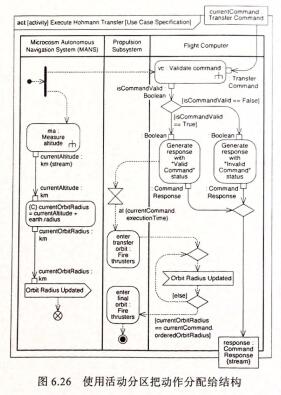
еЫЊ6.26жПРдЊЫдЇЖеЫЊ6.1жЙАз§ЇзЪДеЃМжХіExecute Hohmann TransferжіїеК®зЪДеП¶дЄАзІНиІЖеЫЊгАВ
ињЩйЗМжШЊз§ЇзЪДеК®дљЬеТМдєЛеЙНеЃМеЕ®дЄАж†ЈгАВдљЖжШѓпЉМињЩдЄ™иІЖеЫЊињШжШЊз§ЇдЇЖдЄЙдЄ™жіїеК®еИЖеМЇпЉМи°®з§ЇйВ£ дЇЫеК®дљЬ襀еИЖйЕНзїЩз≥їзїЯж®°еЮЛзЪДдЄЙдЄ™дЄНеРМзЪДж®°еЭЧпЉЪMicrocosm Autonomous Navigation System ( MANS)гАБPropulsion Subsystem еТМ Flight ComputerгАВињЩдЄ™иІЖеЫЊи°®зО∞зЪД Execute Hohmann TransferжЫіеЃєжШУзРЖиІ£вАФвАФињЩзІНи°®ињ∞жККи°МдЄЇдЄОзїУжЮДзЫЄињЮжО•гАВ
е∞ПзїУ
жіїеК®еЫЊжШѓдЄАзІНеЉЇе§ІзЪДдњ°жБѓж≤ЯйАЪе™ТдїЛпЉМдљ†еПѓдї•йЪПзЭАжЧґйЧізЪДжО®зІїдљњзФ®еЃГдЄОеИ©зЫКзЫЄеЕ≥иАЕ ж≤ЯйАЪз≥їзїЯзЪДи°МдЄЇгАВељУдљ†йЬАи¶БжШЊз§ЇжМБзї≠зЪДз≥їзїЯи°МдЄЇпЉМеєґдЄФйЬАи¶БеЕ≥ж≥®дЇЛдїґгАБиГљйЗПеТМжХ∞жНЃзЪД жµБеЬ®дЄАз≥їеИЧеК®дљЬдєЛйЧізЪДжµБеК®(еПѓиГљжШѓдЄ≤и°МжИЦиАЕеєґи°М)жЧґпЉМињЩзІНеЫЊжШѓеЊИе•љзЪДйАЙжЛ©гАВжіїеК® еЫЊзЪДйЗНе§ІдЉШеКњеЬ®дЇОеЃГзЪДеПѓиѓїжАІпЉМеН≥дЊњжЙАжШЊз§ЇзЪДи°МдЄЇжЛ•жЬЙе§НжЭВзЪДжОІеИґйАїиЊСгАВ
дљ†еПѓдї•еЬ®жіїеК®дЄ≠еИЫеїЇи∞ГзФ®и°МдЄЇеК®дљЬжЭ•дЄЇи°МдЄЇеИЖиІ£еїЇж®°гАВеПСйАБдњ°еПЈеК®дљЬеТМжО•еПЧдЇЛдїґ еК®дљЬиЃ©дљ†еПѓдї•дЄЇеИЖеЄГеЉПз≥їзїЯдЄ≠зїУжЮДдєЛйЧізЪДеЉВж≠•йАЪдњ°еїЇж®°гАВдљ†еПѓдї•дљњзФ®з≠ЙеЊЕжЧґйЧіеК®дљЬдЄЇ еС®жЬЯжАІеПСзФЯзЪДи°МдЄЇжИЦиАЕеЬ®зЙєеЃЪжЧґйЧізВєеПСзФЯзЪДи°МдЄЇеїЇж®°гАВжіїеК®еИЖеМЇиЃ©дљ†еПѓдї•дЄЇжіїеК®дЄ≠зЪД еК®дљЬеИЖйЕНиБМиі£пЉМдї•жМЗеЃЪз≥їзїЯдЄ≠зЪДзїУжЮДгАВжЙАжЬЙињЩдЇЫзЙєжАІйГљиЃ©жіїеК®еЫЊжИРдЄЇи°®иЊЊз≥їзїЯи°МдЄЇзЪД вАФзІНжДПдєЙдЄ∞еѓМзЪДе™ТдїЛгАВ