领ه¯¼ç»™ن¸€ن¸ھه°ڈن¼™ن¼´ه®‰وژ’ن؛†ن¸ھAUTOSARé…چç½®ن»»هٹ،ï¼ڑé…چç½®MCAL PWMè°ƒèٹ‚çپ¯ه…‰ï¼Œه°ڈن¼™ن¼´و‘¸ç´¢ن؛†ه‡ ن¸ھوکںوœں,都è؟کو²،输ه‡؛و£ه¸¸çڑ„و³¢ه½¢ï¼Œن¸€ه؛¦و€€ç–‘ç،¬ن»¶وœ‰é—®é¢ک,ç”ڑ至و€€ç–‘ن؛؛ç”ں,هگژو— ه¥ˆو±‚و•‘ن؛ژوˆ‘م€‚وˆ‘ن¹ںèٹ±ن؛†ه‡ ه¤©و—¶é—´ç ”究è؟™çژ©و„ڈ,ه‘è؟کçœںه¤ڑ,走ن؛†ن¸چه°‘ه¼¯è·¯ï¼Œن؛ژوک¯ه°±وœ‰ن؛†çژ°هœ¨è؟™ن¸ھو€»ç»“م€‚
وœ¬و–‡هˆ†هچپن¸ھç« èٹ‚و¥è®²è§£ï¼ڑ
0.ه…³ن؛ژPWM
1.RH850 MCUن¸çڑ„PWM
2.PWMçڑ„و–‡ن»¶ç»“و„
3.PWMçڑ„و—¶ه؛ڈ调用
4.PWMçڑ„Porté…چç½®
5.PWMçڑ„هں؛وœ¬ه±و€§é…چç½®
6.PWMçڑ„é€ڑéپ“é…چç½®
7.PWMçڑ„Unité…چç½®
8.PWMن»£ç پو،ˆن¾‹
9.و€»ç»“
ه°½هڈ¯èƒ½هœ°وٹٹè¦پ点وڈگ炼ه‡؛و¥è®²è§£ï¼Œè®©ه¤§ه®¶ه؟«é€ںن¸ٹو‰‹ï¼Œه°‘èµ°ه¼¯è·¯م€‚
هڈ¦ه¤–,ه¯¹ن؛ژ特هˆ«é—®é¢ک点ه¦‚Master/Slaveé€ڑéپ“,وˆ‘هˆ†ن¸‰ن¸ھé—®é¢ک点و¥è§£ç”ï¼ڑ
é—®é¢ک1ï¼ڑن¸؛ن»€ن¹ˆن¼ڑوœ‰Masterه’ŒSlaveè؟™و ·çڑ„ن¸œè¥؟ï¼ں
é—®é¢ک2ï¼ڑن¸¤ن¸ھé€ڑéپ“,ه¦‚ن½•è®¾ç½®هچ ç©؛و¯”ه’Œه‘¨وœںï¼ں
é—®é¢ک3ï¼ڑMasterه’ŒSlaveه¦‚ن½•é€‰و‹©ï¼ں
ه¸Œوœ›ه¯¹ه¤§ه®¶وœ‰ه¸®هٹ©م€‚
0.ه…³ن؛ژPWM
PWMهچ³Pulse Width Modulation,é€ڑè؟‡ICçڑ„PWMç،¬ن»¶هٹں能ن؛§ç”ںPWMن؟،هڈ·م€‚
PWMوœ‰ه‡ ن¸ھ特点هڈ‚و•°ï¼ڑ
- ç،¬ن»¶é€ڑéپ“(HW Channel)
- ه‘¨وœں(Period)
- هچ ç©؛و¯”(Duty Cycle)
- وپو€§ï¼ˆPolarity,high/low)
- ç©؛é—²çٹ¶و€پ(IDLE State, high/low)
- é€ڑéپ“ç±»ه‹ï¼ˆChannel Class)
è؟™ن؛›و¦‚ه؟µï¼Œهپڑè؟‡هµŒه…¥ه¼ڈ/MCUه¼€هڈ‘çڑ„软ç،¬ن»¶ه·¥ç¨‹ه¸ˆéƒ½ه؛”该ه¾ˆç†ںو‚‰ï¼Œè؟™é‡Œه°±ن¸چç´¯è؟°ن؛†م€‚
ن»¥وژ§هˆ¶LEDçپ¯ن¸؛ن¾‹ï¼Œé€ڑè؟‡PWM输ه‡؛هڈ¯ن»¥وژ§هˆ¶ه…¶ن؛®ه؛¦ï¼Œé€ڑه¸¸è®¾ç½®çڑ„هڈ‚و•°وœ‰هچ ç©؛و¯”ه’Œه‘¨وœںم€‚هژںçگ†ه…¶ه®ه¾ˆç®€هچ•ï¼Œه؟«é€ںçڑ„é«کن½ژ电ه¹³è¾“ه‡؛,ن¼ڑ让LEDن¸€ن؛®ن¸€çپ,ن؛؛眼وک¯ه¾ˆéڑ¾ه¯ں觉ه‡؛é—ھçƒپçڑ„,و£ه› ن¸؛è؟™ن¸ھ特点,PWMه¤§وœ‰ç”¨و¦ن¹‹هœ°م€‚ه½“然,除ن؛†LEDوژ§هˆ¶ï¼Œè؟کوœ‰ه¾ˆه¤ڑو–¹é¢éƒ½هڈ¯ن»¥ç”¨هˆ°PWM,ن¾‹ه¦‚LCDçڑ„VCOM电هژ‹ï¼Œé€ڑè؟‡هگژç؛§ç”µè·¯é…چهگˆï¼ŒPWMهڈ¯ن»¥و”¹هڈک电هژ‹çڑ„م€‚
ن¸‹é¢é€ڑè؟‡ن¸€ه¼ ه›¾و¥ç®€هچ•è¯´وکژن¸‹PWMçڑ„特点ه’ŒAUTOSAR相ه…³çڑ„ه‡½و•°ن½؟用م€‚
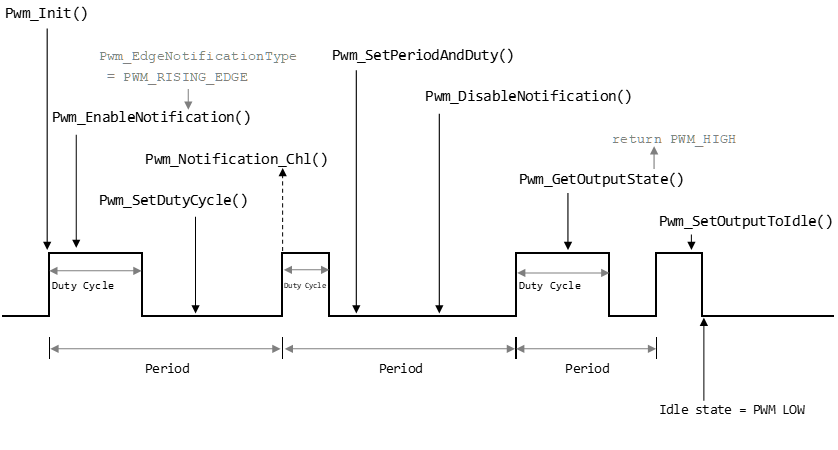
è؟™ن¸ھه›¾ç®€و´پè،¨è¾¾ن؛†PWMه‡ ن¸ھAPIçڑ„ن½؟用و„ڈه›¾ï¼Œهڈ¯ن»¥هڈ‚考ن¸‹é¢ç« èٹ‚çڑ„و—¶ه؛ڈه›¾ن؛†è§£و›´è¯¦ç»†çڑ„调用وƒ…ه†µم€‚
1.RH850 MCUن¸çڑ„PWM
(ه¦‚وœن½ ن¸چه…³و³¨RH850çڑ„PWM,هڈ¯ن»¥è·³è؟‡è؟™ن¸€ç« èٹ‚)
RH850çڑ„PWMوœ‰ه‡ ç§چ,هڈ¯ن»¥ç”¨PWM-Diagو¨،ه—,ن¹ںهڈ¯ن»¥ç”¨TAUxو¨،ه—(TAUD0, TAUB0, TAUB1, TAUJ0 and TAUJ1)م€‚
PWM-Diagو¯”较简هچ•ï¼Œن½†وک¯èµ„و؛گوœ‰é™گ,能设置çڑ„频çژ‡ه¾ˆن½ژم€‚
ن»¥ن¸‹ن»¥TAUDن¸؛ن¾‹و¥è¯¦ç»†è®²è§£ن¸‹م€‚
ه…ˆçœ‹çœ‹TAUDè؟™ن¸ھو¨،ه—é€ڑéپ“ه›¾
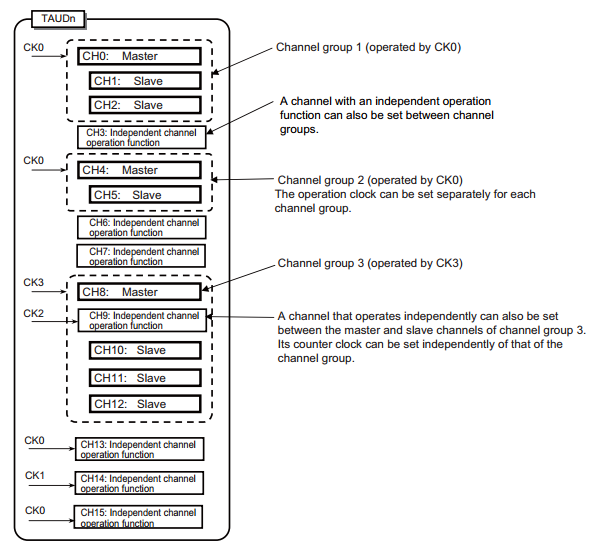
é—®é¢ک1ï¼ڑن¸؛ن»€ن¹ˆن¼ڑوœ‰Masterه’ŒSlaveè؟™و ·çڑ„ن¸œè¥؟ï¼ں
Master/Slaveé€ڑéپ“,هچ³ه¸¸è¯´çڑ„ن¸»/ن»ژé€ڑéپ“
ن¸»/ن»ژé€ڑéپ“çڑ„وژ§هˆ¶è§¦هڈ‘ن؟،هڈ·
ن¸»é€ڑéپ“هڈ¯ن»¥ه°†وژ§هˆ¶è§¦هڈ‘ن؟،هڈ·è¾“ه‡؛هˆ°ن»ژé€ڑéپ“م€‚
ن»ژé€ڑéپ“هڈ¯ن»¥ن½؟用و¥è‡ھن¸»é€ڑéپ“çڑ„وژ§هˆ¶è§¦هڈ‘ن؟،هڈ·ï¼Œن½†ن¸چ能ه°†ه…¶è‡ھè؛«çڑ„وژ§هˆ¶è§¦هڈ‘ن؟،هڈ·è¾“ه‡؛هˆ°è¾ƒن½ژçڑ„é€ڑéپ“م€‚
ن¸»é€ڑéپ“ن¸چ能ن½؟用و¥è‡ھن¸ٹه±‚ن¸»é€ڑéپ“çڑ„وژ§هˆ¶è§¦هڈ‘ن؟،هڈ·م€‚
و¤هٹں能é€ڑè؟‡ن½؟用ن¸€ن¸ھن¸»é€ڑéپ“ه’Œه¤ڑن¸ھن»ژé€ڑéپ“و¥ç”ںوˆگه¤ڑن¸ھPWM输ه‡؛م€‚ه®ƒن½؟能设置脉ه†²ه‘¨وœں(频çژ‡ï¼‰ه’ŒTAUDTTOUTmçڑ„هچ ç©؛و¯”م€‚脉ه†²ه‘¨وœںهœ¨ن¸»é€ڑéپ“ن¸è®¾ç½®م€‚هœ¨ن»ژé€ڑéپ“ن¸è®¾ç½®هچ ç©؛و¯”م€‚
é—®é¢ک2ï¼ڑن¸¤ن¸ھé€ڑéپ“,ه¦‚ن½•è®¾ç½®هچ ç©؛و¯”ه’Œه‘¨وœںï¼ں
è؟™é‡Œه°±وœ‰ن¸ھه…¬ه¼ڈï¼ڑ
Pulse cycle = (TAUDnCDRm (master) + 1) أ— count clock cycle
Duty cycle [%] = (TAUDnCDRm (slave)/(TAUDnCDRm (master) + 1)) أ— 100
– Duty cycle = 0%
TAUDnCDRm (slave) = 0000H
– Duty cycle = 100%
TAUDnCDRm (slave) ≥ TAUDnCDRm (master) + 1
ه‡ ن¸ھن¸œè¥؟çڑ„ه…³ç³»ï¼Œهڈ¯ه¯¹ه؛”ن¸‹ه›¾ن½œهڈ‚考
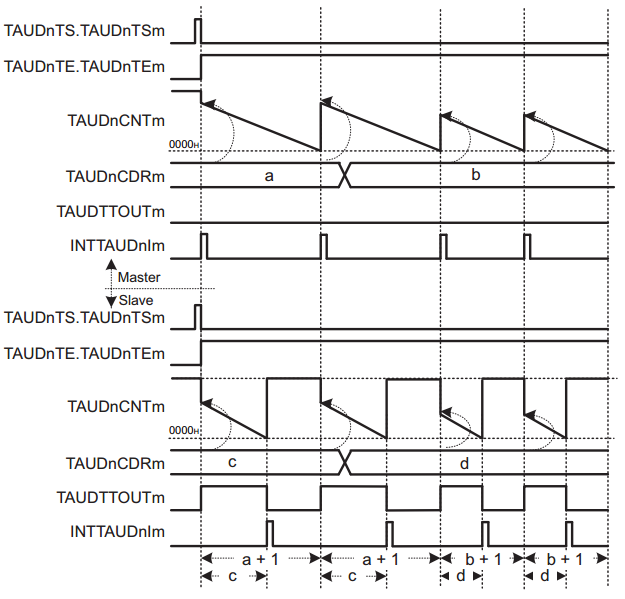
ه¦‚وœوƒ³ن؛†è§£و›´ه¤ڑهژںçگ†ه’Œç»†èٹ‚,ه»؛è®®وں¥çœ‹ن¸‹RH850çڑ„SPECن¸çڑ„TAUDه†…ه®¹ï¼Œé‡Œé¢وœ‰ه¾ˆè¯¦ç»†çڑ„وڈڈè؟°م€‚
2.PWMçڑ„و–‡ن»¶ç»“و„
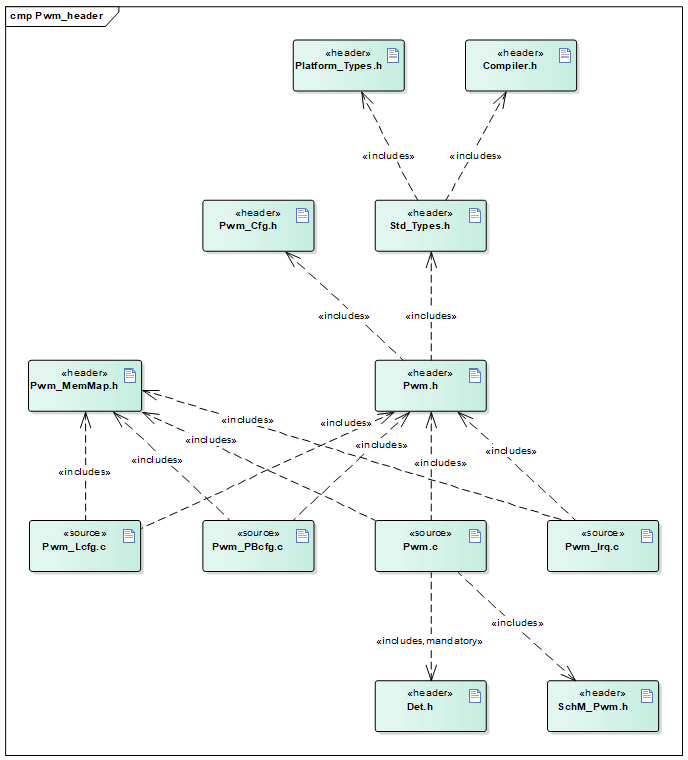
وژ¥ç€ï¼Œçœ‹çœ‹AUTOSARو¶و„里é¢çڑ„PWMوک¯و€ژن¹ˆè®¾è®،çڑ„م€‚
ن»¥ن¸‹وک¯PWMçڑ„و–‡ن»¶ç»“و„ه…³ç³»ï¼Œه¤§و¦‚ن؛†è§£ن¸‹è؟™و–¹é¢ه†…ه®¹ه°±هڈ¯ن»¥ن؛†م€‚
3.PWMçڑ„و—¶ه؛ڈ调用
è؟™éƒ¨هˆ†وک¯PWMçڑ„API调用و—¶ه؛ڈ,هœ¨ن½؟用PWM APIçڑ„و—¶ه€™è¦پو³¨و„ڈè؟™و–¹é¢çڑ„ه†…ه®¹ï¼Œو¯”较é‡چè¦پم€‚
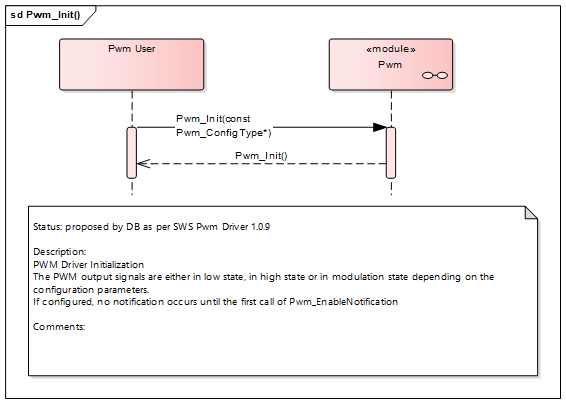
(1)Pwm_Initçڑ„ن½؟用
è؟™ن¸€èˆ¬éƒ½وک¯EcuMن¼ڑ调用è؟™ن¸ھهˆه§‹هŒ–,ه‰چوڈگوک¯è¦پهœ¨EcuM里é¢é…چç½®è؟™ن¸ھهˆه§‹هŒ–م€‚
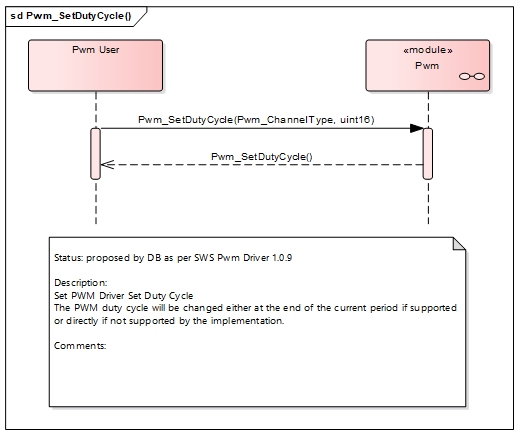
(2)Pwm_SetDutyCycleçڑ„ن½؟用
è؟™ن¸ھه‡½و•°ه¾ˆه¸¸ç”¨ï¼Œه› ن¸؛用هˆ°PWMهں؛وœ¬éƒ½وœ‰ن¼ڑو”¹هڈکPWMçڑ„هچ ç©؛و¯”çڑ„م€‚
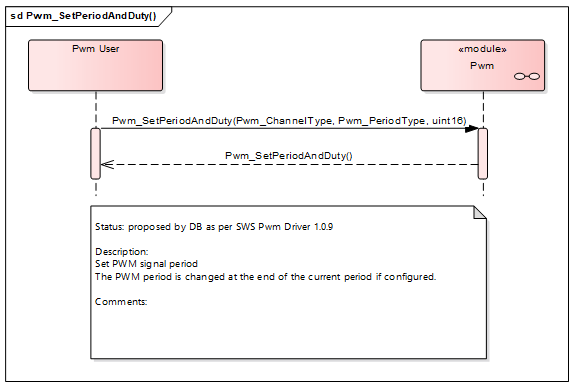
(3)Pwm_SetPeriodAndDutyçڑ„ن½؟用
è؟™ن¸ھه‡½و•°ن¹ںه¾ˆه¸¸ç”¨ï¼Œè·ںه‰چé¢çڑ„Pwm_SetDutyCycleç±»ن¼¼ï¼Œه¤ڑن؛†ن¸ھPeriodçڑ„هڈ‚و•°م€‚
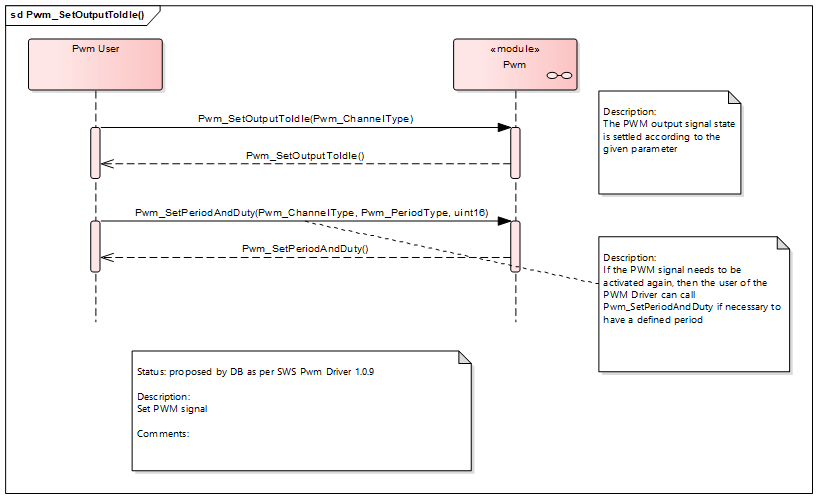
(4)Pwm_SetOutputToIdleçڑ„ن½؟用
看هگچه—ه°±ه¾ˆه®¹وک“çگ†è§£è؟™ن¸ھه‡½و•°çڑ„و„ڈه›¾ن؛†ï¼Œéœ€ن¸چ需è¦پن½؟用è¦پ看ه…·ن½“ه؛”用caseم€‚
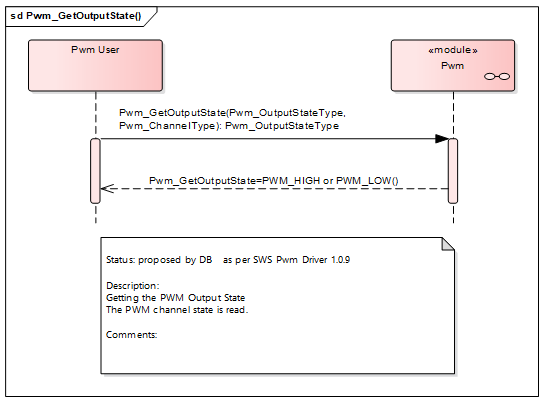
(5)Pwm_GetOutputStateçڑ„ن½؟用
看هگچه—ن¹ںه¾ˆه®¹وک“çگ†è§£è؟™ن¸ھه‡½و•°çڑ„و„ڈه›¾ï¼Œو ¹وچ®ه…·ن½“需è¦پن½؟用م€‚
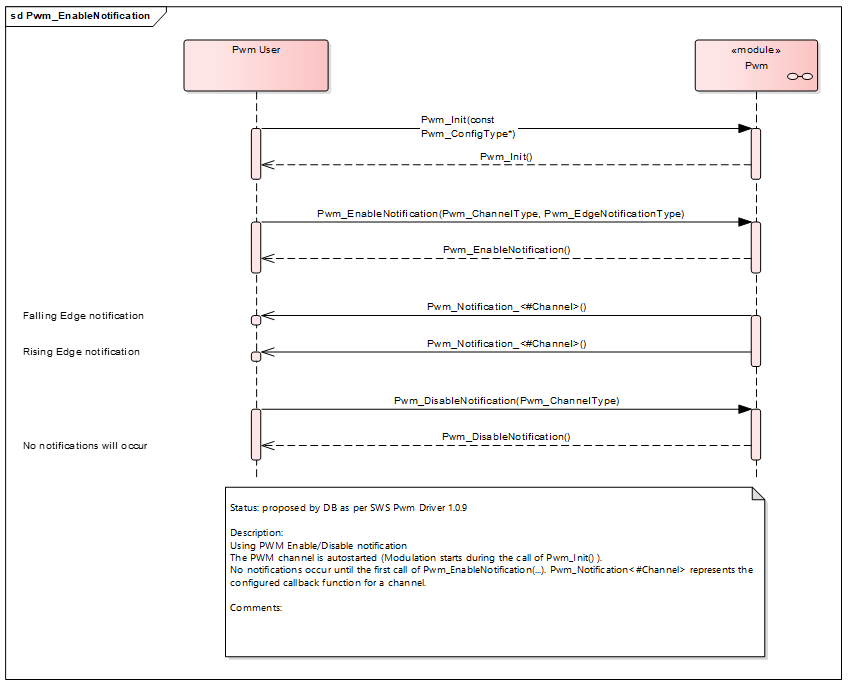
(6)Pwm_EnableNotificationçڑ„ن½؟用
ن½؟能ه›è°ƒه‡½و•°ï¼Œه‰چوڈگوک¯ن½ è¦پé…چç½®ه®ڑن¹‰ه¥½è؟™ن¸ھNotificationه‡½و•°ï¼Œهœ¨ن¸ٹهچ‡و²؟ن¸‹é™چو²؟و—¶ن¼ڑ被调用م€‚
ن»¥ن¸ٹ都وک¯ن¸€ن؛›çگ†è®؛وˆ–者و¦‚ه؟µن¸ٹçڑ„ن¸œè¥؟,ن¸‹é¢وک¯é‡چ点,ه®وˆکé…چç½®ه’Œن½؟用PWM,PWMه…·ن½“و€ژن¹ˆé…چç½®ه‡؛و¥ï¼Œهڈˆوک¯ه¦‚ن½•ن½؟用çڑ„ï¼ں
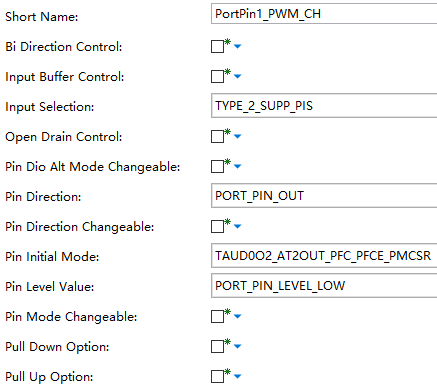
4.PWMçڑ„Porté…چç½®
é…چç½®PWMه‰چ,需è¦پé…چç½®ه…¶ه¯¹ه؛”çڑ„Portه±و€§م€‚
ن»¥ن¸‹é€‰P9-0ه’ŒP9-1ن½œن¸؛ن¾‹هگ讲解,ه¯¹ه؛”çڑ„PWMو¨،ه—وک¯TAUD0
ه…ˆç‚¹ه¼€Basic Editorن¸çڑ„Port
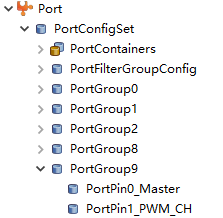
ه°†P9-0é…چç½®وˆگMaster,و¨،ه¼ڈ选ه¤چ选هٹں能TAUD0o0_AT2OUTè؟™ن¸ھ
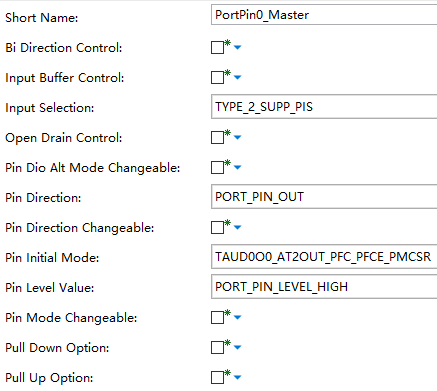
ه°†P9-1é…چç½®وˆگSlave,و¨،ه¼ڈ选ه¤چ选هٹں能TAUD0o2_AT2OUTè؟™ن¸ھ
5.PWMçڑ„هں؛وœ¬ه±و€§é…چç½®
هœ¨é…چç½®PWMé€ڑéپ“ن¹‹ه‰چ,首ه…ˆè¦پو³¨و„ڈن»¥ن¸‹ن¸‰é،¹ه†…ه®¹çڑ„é…چ置,è؟™ن؛›وک¯هں؛وœ¬çڑ„هڈ‚و•°ï¼Œو¯”较简هچ•
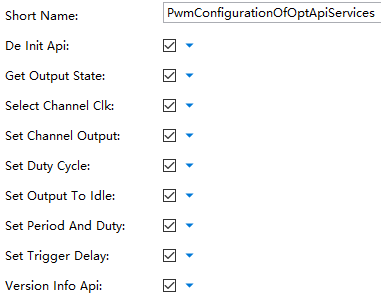
第ن¸€é،¹ï¼ŒPwmConfigurationOfOptApiServices
هچ³è¦پ选ن¸ٹه“ھن؛›ن½ è¦پ用هˆ°çڑ„APIوœچهٹ،,وٹٹ用هˆ°çڑ„ه‹¾é€‰ن¸ٹه°±هڈ¯ن»¥ن؛†
第ن؛Œé،¹ï¼ŒPwmDemEventParameterRefs0
è؟™وک¯DEMو¨،ه—用هˆ°ه…³èپ”هˆ°çڑ„Event,هچ³
ه¼•ç”¨DemEventParameterه…ƒç´ çڑ„ه®¹ه™¨ï¼Œه¦‚وœهڈ‘ç”ں相ه؛”çڑ„错误ه؛”ن½؟用 API Dem_ReportErrorStatus API 调用è؟™ن؛›ه…ƒç´ م€‚EventId هڈ–è‡ھه¼•ç”¨çڑ„DemEventParameterçڑ„DemEventIdه€¼م€‚ه®¹ه™¨ن¸وڈگن¾›ن؛†و ‡ه‡†هŒ–错误,ه¹¶ن¸”هڈ¯ن»¥é€ڑè؟‡ن¾›ه؛”ه•†ç‰¹ه®ڑçڑ„错误هڈ‚考è؟›è،Œو‰©ه±•م€‚
ن¸€èˆ¬é»ک认ه°±ه¥½ن؛†ï¼Œه¦‚وœé…چç½®وڈگç¤؛错误,那ه°±ه¾—ه¥½ه¥½ç ”究ن¸‹è؟™ن؛›Eventه¼•ç”¨ï¼Œè·ںDEMو¨،ه—وœ‰ه…³ï¼Œè؟™é‡Œن¸چ详è؟°ن؛†م€‚
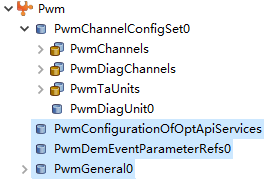
第ن¸‰é،¹ï¼ŒPwmGeneral0
è؟™ن¸ھوک¯PWM驱هٹ¨هں؛وœ¬هڈ‚و•°é…چ置,看هگچ称ن¹ںه¤§و¦‚看ه¾—وکژ白

6.PWMçڑ„é€ڑéپ“é…چç½®
ن»¥ن¸‹وک¯PWMé€ڑéپ“相ه…³çڑ„é…چ置,é…چç½®ه†…ه®¹ن¸چه¤ڑ,ن½†وک¯ن¸چو€ژن¹ˆه¥½çگ†è§£ï¼Œç®—وک¯éڑ¾ç‚¹ن؛†م€‚
ه°†Channel8é…چç½®وˆگMaster,Channel9é…چç½®وˆگSlave
و³¨ï¼ڑه¦‚وœوŒ‰ç…§وˆ‘è؟™ن¸ھن¾‹هگé…چ置,ه؛”该وک¯و²،ه•¥é”™è¯¯çڑ„,ه¾ˆه®¹وک“ه°±ن¼ڑ输ه‡؛PWMو³¢ه½¢م€‚
ه¦‚وœن½ 选çڑ„ن¸چوک¯TAUD0,وˆ–者ن¸چوک¯è؟™ن¸¤ن¸ھé€ڑéپ“,ه°±è¦پو³¨و„ڈن؛†ï¼ŒMasterه’ŒSlaveن¸چوک¯éڑڈن¾؟选çڑ„م€‚
|








