йҡҸзқҖж–°ж—¶д»ЈжҠҖжңҜзҡ„еҸ‘еұ•пјҢ欧жҙІеӨ§ең°еҮәзҺ°дәҶдёӘAUTOSARпјҢжҗһеҫ—еҗ„еӨ§иҪҰеҺӮиҰҒиЈ…дёҠAUTOSARзҡ„и®ҫеӨҮжүҚиғҪеңЁз«һдәүзҷҪзғӯеҢ–зҡ„иҪҰеёӮдёӯеӨәеҫ—дёҖеёӯд№Ӣең°гҖӮиҝҷдёҚOEMд№ҹиҰҒи·ҹзқҖиҝҷи¶ӢеҠҝпјҢд№ҹиҰҒзҺ©зқҖиҝҷAUTOSARдәҶпјҢ然еҗҺжҲ‘е°ұжңүиҝҷзҜҮж–Үз« гҖҠ иҖҒжқҝиҜҙйЎ№зӣ®иҰҒдёҠAUTOSARпјҢжҲ‘ж…Ңеҫ—дёҖжү№ гҖӢ гҖӮдёәдәҶжҗһиҝҷйҷҢз”ҹзҡ„AUTOSARпјҢжҲ‘иҝҳж‘ёдәҶдёҖиҲ¬AUTOSARзҡ„жһ¶жһ„пјҢиҷҡжһ„дәҶдёӘж•…дәӢгҖҠ AUTOSARжһ¶жһ„зҡ„ж•…дәӢпјҲе№Іиҙ§пјү гҖӢгҖӮ
еҘҪдәҶпјҢжҲ‘们и®Өи®Өзңҹзңҹи®Іжһ¶жһ„пјҢAUTOSARйҮҢйқўзҡ„жһ¶жһ„зҹҘиҜҶжҳҜйқһеёёдё°еҜҢзҡ„пјҢйҷӨдәҶд№ӢеүҚи®Ізҡ„жЁЎеқ—пјҢиҝҳжңүжҺҘеҸЈе‘ўгҖӮеҰӮжһңжҜ”е–»иҜҙжЁЎеқ—жҳҜдәәдҪ“зҡ„еҗ„еӨ§еҠҹиғҪз»„з»ҮпјҢйӮЈд№ҲиҝҷдёӘжҺҘеҸЈе°ұеҸҜд»ҘзҗҶи§ЈдёәдәәдҪ“зҡ„иЎҖз®ЎзҘһз»ҸдәҶпјҢе…¶йҮҚиҰҒжҖ§еҸҜжғіиҖҢзҹҘдәҶгҖӮ AUTOSARзҡ„жһ¶жһ„дёәд»Җд№ҲиҰҒејәи°ғиҝҷдёӘжҺҘеҸЈе‘ўпјҢеҸҲжңүд»Җд№Ҳзү№еҲ«зҡ„ең°ж–№е‘ўпјҹдёӢйқўдё”еҗ¬жҲ‘з»Ҷз»ҶйҒ“жқҘгҖӮ
дёҖгҖҒAUTOSAR InterfaceеҲҶзұ»
ејҖй—Ёи§ҒеұұпјҢAUTOSARжҳҜжңүдёүз§ҚжҺҘеҸЈзҡ„пјҢдёәдәҶжӣҙеҘҪеҜ№з…§AUTOSARйҮҢйқўзҡ„ж ҮеҮҶжҰӮеҝөпјҢжҲ‘дҝқз•ҷиӢұж–ҮеҗҚз§°пјҡ
1. AUTOSAR Interface
AUTOSAR Interface е®ҡд№үдәҶиҪҜ件组件е’Ң/жҲ–BSWжЁЎеқ—д№Ӣй—ҙдәӨжҚўзҡ„дҝЎжҒҜгҖӮиҜҘжҸҸиҝ°зӢ¬з«ӢдәҺзү№е®ҡзҡ„зј–зЁӢиҜӯиЁҖпјҢECUжҲ–зҪ‘з»ңжҠҖжңҜгҖӮ AUTOSAR Interface з”ЁдәҺе®ҡд№үиҪҜ件组件е’Ң/жҲ–BSWжЁЎеқ—зҡ„з«ҜеҸЈгҖӮйҖҡиҝҮиҝҷдәӣз«ҜеҸЈпјҢиҪҜ件组件е’Ң/жҲ–BSWжЁЎеқ—еҸҜд»ҘеҪјжӯӨйҖҡдҝЎпјҲеҸ‘йҖҒжҲ–жҺҘ收дҝЎжҒҜжҲ–и°ғз”ЁжңҚеҠЎпјүгҖӮAUTOSARдҪҝеҫ—еҸҜд»ҘеңЁжң¬ең°жҲ–йҖҡиҝҮзҪ‘з»ңеңЁSoftwareComponentsе’Ң/жҲ–BSWжЁЎеқ—д№Ӣй—ҙе®һзҺ°иҝҷз§ҚйҖҡдҝЎгҖӮ
2. Standardized AUTOSAR Interface
Standardized AUTOSAR Interface жҳҜе…¶иҜӯжі•е’ҢиҜӯд№үеңЁAUTOSARдёӯж ҮеҮҶеҢ–зҡ„ AUTOSAR Interface гҖӮ Standardized AUTOSAR Interface йҖҡеёёз”ЁдәҺе®ҡд№үAUTOSARжңҚеҠЎпјҢиҝҷжҳҜAUTOSARеҹәжң¬иҪҜ件еҗ‘еә”з”ЁзЁӢеәҸиҪҜ件组件жҸҗдҫӣзҡ„ж ҮеҮҶеҢ–жңҚеҠЎгҖӮ
3. Standardized Interface
Standardized Interface жҳҜдёҖз§ҚеңЁAUTOSARдёӯж ҮеҮҶеҢ–зҡ„APIпјҢж— йңҖдҪҝз”Ё AUTOSAR Interface жҠҖжңҜгҖӮиҝҷдәӣ Standardized Interface йҖҡеёёжҳҜдёәзү№е®ҡзҡ„зј–зЁӢиҜӯиЁҖпјҲеҰӮCиҜӯиЁҖпјүе®ҡд№үзҡ„гҖӮеӣ жӯӨпјҢйҖҡеёёеңЁе§Ӣз»ҲдҪҚдәҺеҗҢдёҖECUдёҠзҡ„иҪҜ件模еқ—д№Ӣй—ҙдҪҝз”Ё Standardized Interface гҖӮеҪ“иҪҜ件模еқ—йҖҡиҝҮ Standardized Interface иҝӣиЎҢйҖҡдҝЎж—¶пјҢе°Ҷж— жі•еҶҚйҖҡиҝҮзҪ‘з»ңи·Ҝз”ұиҪҜ件模еқ—д№Ӣй—ҙзҡ„йҖҡдҝЎгҖӮ
иҝҷдәӣж–Үеӯ—жҸҸиҝ°жңүдәӣжҠҪиұЎпјҢжӢҝдёӘеӣҫжқҘзңӢзңӢд№ҹи®ёдјҡжӣҙзӣҙи§ӮзӮ№пјҡ
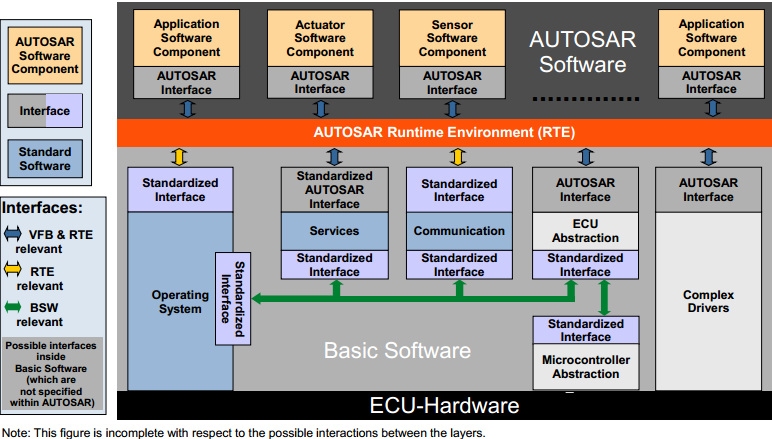
д»ҺдёҠеӣҫеҸҜд»ҘзңӢеҮәпјҢз®ҖеҚ•ең°зҗҶи§ЈпјҢ AUTOSAR Interface еӨҡз”ЁдәҺApplicationгҖҒAbstractionдәҺComplex DriverдёҠпјӣ Standardized AUTOSAR Interface еӨҡз”ЁдәҺBSWдёӯзҡ„ServiceдёҠпјӣиҖҢ Standardized Interface е‘ўпјҢжҳҜAUTOSARе®ҡд№үзҡ„BSWдёӯзҡ„жЁЎеқ—зӣҙжҺҘдәӨдә’з”Ёзҡ„жҺҘеҸЈгҖӮ
дәҢгҖҒAUTOSAR InterfaceйҖҡ用规еҲҷ
AUTOSARе®ҡд№үдәҶиҝҷд№ҲеӨҡдёӘжЁЎеқ—пјҢ他们зӣҙжҺҘзҡ„и°ғз”Ёд№ҹе®ҡд№үдёүз§ҚдёҚеҗҢзҡ„жҺҘеҸЈпјҢжҳҜдёҚжҳҜ他们е°ұеҸҜд»Ҙзӣёдә’и°ғз”ЁдәҶпјҹжңүжІЎжңүд»Җд№Ҳ规еҲҷжҲ–йҷҗеҲ¶е‘ўпјҹ
йҰ–е…ҲпјҢжқҘзңӢдёӘеӣҫе°ұеҫҲе®№жҳ“жҳҺзҷҪдәҶпјҡ
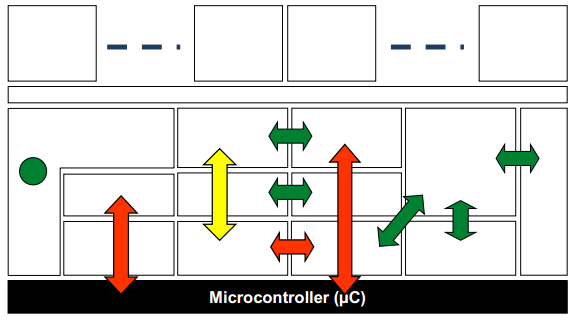
жқҘзңӢзңӢиҝҷеӣҫдёҠзҡ„з®ӯеӨҙе’ҢйўңиүІпјҢиҝҳжңүиҝҷдёӘз»ҝиүІзҡ„еңҶзӮ№д»ЈиЎЁд»Җд№Ҳж„ҸжҖқгҖӮ
 |
1. еҜ№дәҺжңҚеҠЎеұӮпјҢе…Ғи®ёж°ҙе№іжҺҘеҸЈи°ғз”ЁгҖӮ
дҫӢеҰӮпјҢError ManagerдҪҝз”ЁNVRAM Managerдҝқеӯҳж•…йҡңж•°жҚ®
2. еҜ№дәҺECUжҠҪиұЎеұӮпјҢе…Ғи®ёж°ҙе№іжҺҘеҸЈи°ғз”ЁгҖӮ
3. еӨҚжқӮзҡ„й©ұеҠЁзЁӢеәҸеҸҜиғҪдјҡдҪҝз”Ёе…¶д»–йҖүе®ҡзҡ„BSWжЁЎ |
 |
еҜ№дәҺВөCжҠҪиұЎеұӮпјҢдёҚе…Ғи®ёдҪҝз”Ёж°ҙе№іжҺҘеҸЈи°ғз”ЁгҖӮдҪҶжҳҜз”ұдәҺжҖ§иғҪеҺҹеӣ пјҢе…Ғи®ёеҸҜй…ҚзҪ®зҡ„NotificationгҖӮ |
 |
дёҖеұӮеҸҜд»Ҙи®ҝй—®дёӢйқўзҡ„SWеұӮзҡ„жүҖжңүжҺҘеҸЈгҖӮ |
 |
еә”йҒҝе…Қз»•иҝҮдёҖдёӘиҪҜ件еұӮгҖӮ |
 |
дёҚе…Ғи®ёз»•иҝҮдёӨдёӘжҲ–еӨҡдёӘиҪҜ件еұӮпјӣ
дёҚе…Ғи®ёз»•иҝҮВөCжҠҪиұЎеұӮгҖӮ |
 |
дёҖдёӘжЁЎеқ—еҸҜд»Ҙи®ҝй—®еҸҰдёҖдёӘеұӮз»„зҡ„иҫғдҪҺеұӮжЁЎеқ—пјҲдҫӢеҰӮпјҢз”ЁдәҺеӨ–йғЁзЎ¬д»¶зҡ„SPIпјүгҖӮ |
 |
жүҖжңүеұӮйғҪеҸҜд»ҘдёҺзі»з»ҹжңҚеҠЎдәӨдә’гҖӮ |
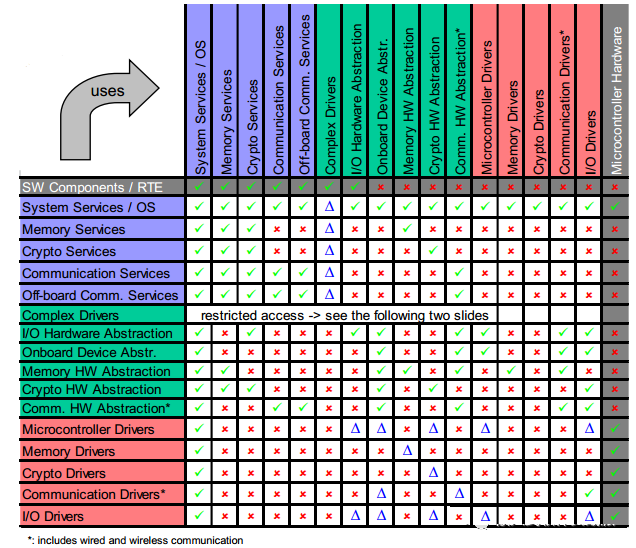
д»ҘдёҠеҶ…е®№йғҪеҫҲеҘҪзҗҶи§ЈпјҢдҪҶеҜ№дәҺжӣҙиҜҰз»Ҷзҡ„жЁЎеқ—组件д№Ӣй—ҙзҡ„зӣёдә’д№Ӣй—ҙи°ғз”Ёе…ізі»е’ҢзәҰжқҹпјҢеҸҜд»ҘйҖҡиҝҮдёӢйқўиҝҷдёӘзҹ©йҳөиЎЁжқҘиҜҙжҳҺгҖӮ
жіЁпјҡ
вҲҡ иЎЁзӨәе…Ғи®ёдҪҝз”Ё
Г— иЎЁзӨәдёҚе…Ғи®ёдҪҝз”Ё
в–і иЎЁзӨәдҪҝз”ЁеҸ—йҷҗпјҲдҪҶcallbackжҳҜе…Ғи®ёзҡ„пјү
иҝҷдёӘзҹ©йҳөиЎЁжҳҜжҢүиЎҢиҜ»еҸ–зҡ„пјҢдҫӢеҰӮпјҢ е…Ғи®ёI/Oй©ұеҠЁзЁӢеәҸдҪҝз”Ёзі»з»ҹжңҚеҠЎе’Ң硬件пјҢдҪҶдёҚиғҪдҪҝз”Ёе…¶д»–еұӮгҖӮпјҲзҒ°иүІиғҢжҷҜиЎЁзӨәвҖңйқһеҹәжң¬иҪҜ件вҖқеұӮпјү |
дёүгҖҒдёҺComplex DriverеұӮжҺҘеҸЈдәӨдә’
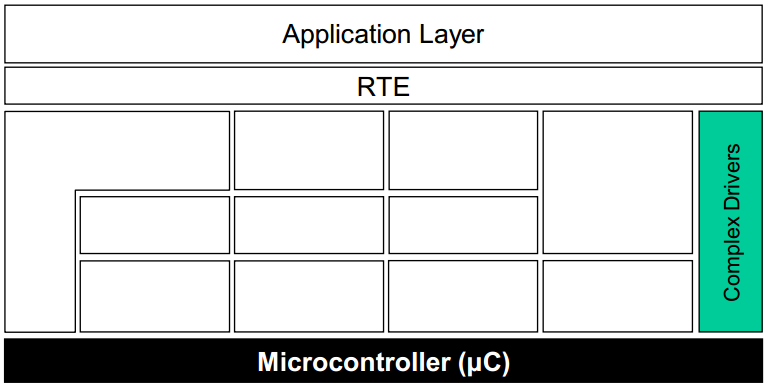
еӨҚжқӮй©ұеҠЁзЁӢеәҸеҸҜиғҪйңҖиҰҒдёҺеҲҶеұӮиҪҜ件дҪ“зі»з»“жһ„дёӯзҡ„е…¶д»–жЁЎеқ—жҺҘеҸЈдәӨдә’пјҢжҲ–иҖ…еҲҶеұӮиҪҜ件дҪ“зі»з»“жһ„дёӯзҡ„жЁЎеқ—еҸҜиғҪйңҖиҰҒдёҺеӨҚжқӮй©ұеҠЁзЁӢеәҸжҺҘеҸЈдәӨдә’гҖӮеңЁиҝҷз§Қжғ…еҶөдёӢпјҢйҖӮз”Ёд»ҘдёӢ规еҲҷпјҡ
1. д»ҺеҲҶеұӮиҪҜ件дҪ“зі»з»“жһ„зҡ„жЁЎеқ—еҲ°еӨҚжқӮй©ұеҠЁзЁӢеәҸзҡ„жҺҘеҸЈ
д»…еҪ“еӨҚжқӮй©ұеҠЁзЁӢеәҸжҸҗдҫӣеҸҜд»ҘйҖҡиҝҮи®ҝй—®AUTOSARжЁЎеқ—иҝӣиЎҢдёҖиҲ¬й…ҚзҪ®зҡ„жҺҘеҸЈж—¶пјҢжүҚе…Ғи®ёиҝҷж ·еҒҡгҖӮ
дёҖдёӘе…ёеһӢзҡ„дҫӢеӯҗжҳҜPDUи·Ҝз”ұеҷЁпјҡеӨҚеҗҲй©ұеҠЁзЁӢеәҸеҸҜд»Ҙе®һзҺ°ж–°жҖ»зәҝзі»з»ҹзҡ„жҺҘеҸЈжЁЎеқ—гҖӮ
еңЁPDUи·Ҝз”ұеҷЁзҡ„й…ҚзҪ®дёӯе·Із»Ҹи§ЈеҶідәҶиҝҷдёҖй—®йўҳгҖӮ
2.д»ҺеӨҚжқӮй©ұеҠЁзЁӢеәҸеҲ°еҲҶеұӮиҪҜ件дҪ“зі»з»“жһ„зҡ„жЁЎеқ—зҡ„жҺҘеҸЈ
еҗҢж ·пјҢд»…еҪ“еҲҶеұӮиҪҜ件дҪ“зі»з»“жһ„зҡ„еҗ„дёӘжЁЎеқ—жҸҗдҫӣжҺҘеҸЈе№¶еҮҶеӨҮз”ұеӨҚжқӮй©ұеҠЁзЁӢеәҸи®ҝй—®ж—¶пјҢжүҚе…Ғи®ёиҝҷж ·еҒҡгҖӮйҖҡеёёиҝҷж„Ҹе‘ізқҖпјҡ
- еҗ„дёӘжҺҘеҸЈе®ҡд№үдёәеҸҜйҮҚе…ҘгҖӮ
- еҰӮжһңдҪҝз”ЁCallbackзЁӢеәҸпјҢеҲҷеҗҚз§°жҳҜеҸҜй…ҚзҪ®зҡ„
- жІЎжңүз®ЎзҗҶжЁЎеқ—зҠ¶жҖҒзҡ„дёҠеұӮжЁЎеқ—пјҲ并иЎҢи®ҝй—®дјҡжӣҙж”№зҠ¶жҖҒпјҢиҖҢдёҚдјҡиў«дёҠеұӮжЁЎеқ—йҖҡзҹҘпјү
йҖҡеёёпјҢеҸҜд»Ҙи®ҝй—®д»ҘдёӢжЁЎеқ—пјҡ
- SPIй©ұеҠЁ
- GPTй©ұеҠЁзЁӢеәҸ
- I/Oй©ұеҠЁзЁӢеәҸйҖҡеёёеҸӘеҜ№еҚ•зӢ¬зҡ„з»„/йҖҡйҒ“/зӯүеӯҳеңЁйҮҚе…ҘйҷҗеҲ¶гҖӮ并иЎҢи®ҝй—®зӣёеҗҢзҡ„з»„/йҖҡйҒ“/зӯүпјҢйҖҡеёёжҳҜдёҚе…Ғи®ёзҡ„гҖӮеңЁй…ҚзҪ®иҝҮзЁӢдёӯеҝ…йЎ»жіЁж„ҸиҝҷдёҖзӮ№гҖӮ
- NVRAM ManagerдҪңдёәеҶ…еӯҳе Ҷж Ҳзҡ„зӢ¬еҚ и®ҝй—®зӮ№
- Watchdog ManagerдҪңдёәзңӢй—ЁзӢ—е Ҷж Ҳзҡ„зӢ¬еҚ и®ҝй—®зӮ№
- PDU RouterдҪңдёәйҖҡдҝЎе Ҷж Ҳзҡ„дё“з”ЁжҖ»зәҝе’ҢеҚҸи®®ж— е…ізҡ„и®ҝй—®зӮ№
- зү№е®ҡдәҺжҖ»зәҝзҡ„жҺҘеҸЈжЁЎеқ—пјҢдҪңдёәйҖҡдҝЎе Ҷж Ҳзҡ„дё“жңүжҖ»зәҝдё“з”Ёи®ҝй—®зӮ№
- NMжҺҘеҸЈжЁЎеқ—дҪңдёәзҪ‘з»ңз®ЎзҗҶе Ҷж Ҳзҡ„дё“з”Ёи®ҝй—®зӮ№
- COM ManagerпјҲд»…жқҘиҮӘдёҠеұӮпјүе’Ңеҹәжң¬иҪҜ件Mode ManagerдҪңдёәзҠ¶жҖҒз®ЎзҗҶзҡ„дё“з”Ёи®ҝй—®зӮ№
- DetпјҢDemе’ҢDlt
- еҸӘиҰҒеҲҶеұӮзҡ„иҪҜ件дҪ“зі»з»“жһ„зҡ„жЁЎеқ—дёҚдҪҝз”ЁжүҖдҪҝз”Ёзҡ„OSеҜ№иұЎпјҢе°ұеҸҜд»ҘдҪҝз”ЁиҜҘOS
- еҜ№дәҺжҜҸдёӘжЁЎеқ—пјҢд»Қ然йңҖиҰҒжЈҖжҹҘзӣёеә”еҠҹиғҪжҳҜеҗҰж Үи®°дёәеҸҜйҮҚе…ҘгҖӮдҫӢеҰӮпјҢвҖң initвҖқеҠҹиғҪйҖҡеёёжҳҜдёҚеҸҜйҮҚе…Ҙзҡ„пјҢеҸӘиғҪз”ұECU State Managerи°ғз”ЁгҖӮ
еҜ№дәҺеӨҡж ёдҪ“зі»з»“жһ„пјҢиҝҳжңү其他规еҲҷпјҡ
- BSWеҸҜд»ҘеҲҶеёғеңЁеӨҡдёӘж ёеҝғдёҠгҖӮиҙҹиҙЈжү§иЎҢеҜ№BSWжңҚеҠЎзҡ„и°ғз”Ёзҡ„ж ёеҝғз”ұе…¶BswOperationInvokedEventзҡ„д»»еҠЎжҳ е°„зЎ®е®ҡгҖӮ
- д»…е…Ғи®ёдҪҝз”Ёдё»/д»Һе®һзҺ°жЁЎеқ—еҶ…йғЁйҖҡдҝЎи·Ёи¶ҠеҲҶеҢәе’Ңж ёеҝғиҫ№з•ҢгҖӮ
- еӣ жӯӨпјҢеҰӮжһңCDDйңҖиҰҒи®ҝй—®BSWзҡ„ж ҮеҮҶеҢ–жҺҘеҸЈпјҢеҲҷе®ғеҝ…йЎ»дҪҚдәҺеҗҢдёҖж ёеҝғдёҠгҖӮ
- еҰӮжһңCDDй©»з•ҷеңЁдёҚеҗҢзҡ„еҶ…ж ёдёҠпјҢеҲҷеҸҜд»ҘдҪҝ用常规з«ҜеҸЈжңәеҲ¶и®ҝй—®AUTOSARжҺҘеҸЈе’Ңж ҮеҮҶеҢ–зҡ„AUTOSARжҺҘеҸЈгҖӮиҝҷе°Ҷи°ғз”ЁRTEпјҢеҗҺиҖ…дҪҝз”Ёж“ҚдҪңзі»з»ҹзҡ„IOCжңәеҲ¶е°ҶиҜ·жұӮдј иҫ“еҲ°еҸҰдёҖдёӘеҶ…ж ёгҖӮ
- дҪҶжҳҜпјҢеҰӮжһңCDDйңҖиҰҒи®ҝй—®BSWзҡ„ж ҮеҮҶеҢ–жҺҘеҸЈе№¶дё”дёҚеңЁеҗҢдёҖж ёеҝғдёҠпјҢ
1. жҸҗдҫӣж ҮеҮҶжҺҘеҸЈзҡ„д»»дҪ•д»Һз«ҜйғҪеҸҜд»ҘеңЁCDDжүҖеңЁзҡ„ж ёеҝғдёҠиҝҗиЎҢпјҢ并е°Ҷи°ғз”ЁиҪ¬еҸ‘еҲ°еҸҰдёҖдёӘж ёеҝғпјӣ2. жҲ–CDDзҡ„еӯҳж №йғЁеҲҶйңҖиҰҒеңЁеҸҰдёҖдёӘеҶ…ж ёдёҠе®һзҺ°пјҢ并且йҖҡдҝЎйңҖиҰҒдҪҝз”Ёзұ»дјјдәҺRTEзҡ„ж“ҚдҪңзі»з»ҹзҡ„IOCжңәеҲ¶еңЁжң¬ең°CDDдёҠиҝӣиЎҢз»„з»ҮгҖӮ
- еҸҰеӨ–пјҢеңЁеҗҺдёҖз§Қжғ…еҶөдёӢпјҢCDDзҡ„еҲқе§ӢеҢ–йғЁеҲҶд№ҹйңҖиҰҒй©»з•ҷеңЁдёҚеҗҢеҶ…ж ёдёӯгҖӮ
д»ҘдёҠеҶ…е®№жҳҜдёҚжҳҜзңӢдёҠеҺ»дёҖеӨҙйӣҫж°ҙпјҲжҲ‘жҳҜд»ҺAUTOSARе®ҳж–№ж–ҮжЎЈзҝ»иҜ‘иҝҮжқҘзҡ„пјүгҖӮCDDеҚіеӨҚжқӮй©ұеҠЁпјҢеҗҚеӯ—еҸ–еҫ—дёҖзӮ№йғҪжІЎй”ҷпјҢе“Ҳе“Ҳе“ҲгҖӮиҝҷдёӘжЁЎеқ—жң¬иә«е°ұдёҚжҳҜдёҖдёӘж ҮеҮҶзҡ„жЁЎеқ—пјҢиҖҢжҳҜдёәдәҶйӮЈдәӣйқһж ҮеҮҶе®һзҺ°дёҚдәҶзҡ„и®ҫи®ЎиҖҢе®ҡзҡ„пјҢд№ҹжІЎжңүеӣәе®ҡзҡ„规еҲҷпјҢжүҖд»ҘиҝҷйҮҢзҡ„жҺҘеҸЈйҷҗеҲ¶еҶ…е®№е°ұдјҡжңүдәӣз№ҒжқӮгҖӮ
зңӢдёҚжҮӮд№ҹжІЎе…ізі»пјҢиҰҒз”ЁеҲ°зӣёе…іеҶ…е®№зҡ„ж—¶еҖҷпјҢеҶҚжқҘеҜ№з…§дёӢжҲ–и®ёдјҡжӣҙжҳҺдәҶгҖӮ
дёәдәҶжӣҙеҘҪзҗҶи§ЈиҝҷдәӣжҺҘеҸЈзҡ„еҠҹиғҪе’Ңз”Ёжі•пјҢд»ҘдёӢйҖҡиҝҮе®һдҫӢжқҘи§ЈиҜҙгҖӮ
еӣӣгҖҒ AUTOSAR еұӮд№Ӣй—ҙдәӨдә’пјҲMemoryпјү
еңЁи®Іи§ЈMemoryд№ӢеүҚпјҢжҲ‘们е…ҲжҖқиҖғдёӢеҮ дёӘй—®йўҳпјҡ
- иҪҜ件еұӮеҲ°еә•жҳҜжҖҺд№ҲдәӨдә’зҡ„пјҹ
- иҪҜ件InterfaceжҳҜй•ҝе•Ҙж ·зҡ„пјҹ
- ECU Abstraction LayerеҶ…йғЁжҳҜд»Җд№Ҳпјҹ
- еҰӮдҪ•й«ҳж•Ҳең°е®һзҺ° Abstraction Layer пјҹ
зҺ°еңЁдёҚзҹҘйҒ“зӯ”жЎҲд№ҹжІЎе…ізі»пјҢжҲ‘们еёҰзқҖиҝҷдәӣз–‘й—®пјҢдёҖиө·жҺўи®ЁдёӢMemoryйҮҢйқўзҡ„жҺҘеҸЈдәӨдә’гҖӮ
д»ҘдёӢжЎҲдҫӢжҳҜи®Іиҝ°NVRAM Manageе’ҢWatchdog ManagerдёҺDriverдәӨдә’зҡ„жғ…еҶөгҖӮ иҝҷдёӘжЎҲдҫӢжҳҜеҹәдәҺд»ҘдёӢеҒҮи®ҫиҝӣиЎҢзҡ„пјҡ
- ECU硬件еҢ…еҗ«жңүдёҖдёӘеӨ–йғЁзҡ„EEPROMе’ҢдёҖдёӘеӨ–йғЁзҡ„WatchdogпјҢ并йҖҡиҝҮSPIиҝһжҺҘеҲ°MCUгҖӮ
- еңЁSPIHandlerDriverжҺ§еҲ¶дёӢпјҢеҸҜд»ҘеҗҢж—¶и®ҝй—®SPIеӨ–и®ҫпјҢеҗҢж—¶и®ҫе®ҡWatchdogзҡ„дјҳе…Ҳзә§жҜ”EEPROMзҡ„й«ҳгҖӮ
- MCUиҝҳеҢ…еҗ«дёҖдёӘеҶ…йғЁзҡ„FlashпјҢе’ҢEEPROM并еҲ—еӯҳеңЁгҖӮEEPROMзҡ„Abstractionе’ҢFlash EEPROM EmulationжңүзқҖзӣёеҗҢиҜӯд№үзҡ„APIгҖӮ
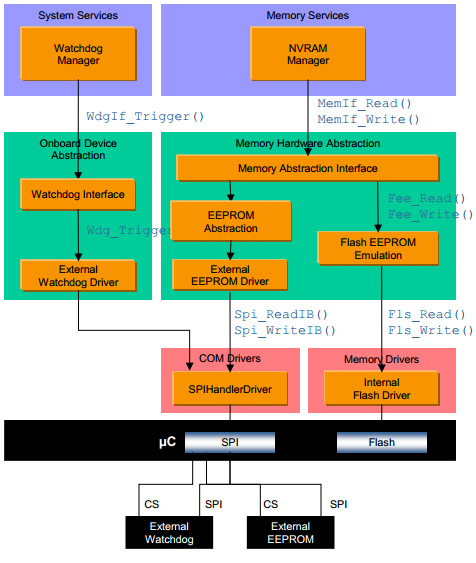
M emory Abstraction InterfaceеҸҜд»ҘйҖҡиҝҮд»ҘдёӢж–№ејҸе®һзҺ°пјҡ
- еңЁиҝҗиЎҢж—¶ж №жҚ®Device IndexпјҲint / extпјүиҝӣиЎҢеӨ„зҗҶ
- еңЁиҝҗиЎҢж—¶ж №жҚ®Block IndexиҝӣиЎҢеӨ„зҗҶпјҲдҫӢеҰӮ0x01FF дёәеӨ–йғЁEEPROMпјү
- еңЁй…ҚзҪ®жңҹй—ҙйҖҡиҝҮе…·жңүNVRAM ManagerеҶ…йғЁеҠҹиғҪжҢҮй’Ҳзҡ„ROMиЎЁиҝӣиЎҢи·Ҝз”ұпјҲеңЁиҝҷз§Қжғ…еҶөдёӢпјҢMemory Abstraction Interfaceд»…вҖңиҷҡжӢҹвҖқеӯҳеңЁпјү
еңЁжһ¶жһ„дёҠпјҢNVRAM Manager йҖҡиҝҮ Memory Abstraction Interface и®ҝй—®Driver . е®ғз”Ёи®ҫеӨҮIndexжқҘеҜ»еқҖдёҚеҗҢзҡ„Memoryи®ҫеӨҮ. Memory Abstraction Interface жңүд»ҘдёӢжҺҘеҸЈ :
Std_ReturnType MemIf_Write
(
uint8 DeviceIndex,
uint16 BlockNumber,
uint8 *DataBufferPtr
) |
EAпјҲеҚі EEPROM Abstraction пјүд»ҘеҸҠFEEпјҲ Flash EEPROM Emulation пјүжңүд»ҘдёӢжҺҘеҸЈ :
Std_ReturnType Ea_Write
(
uint16 BlockNumber,
uint8 *DataBufferPtr
) |
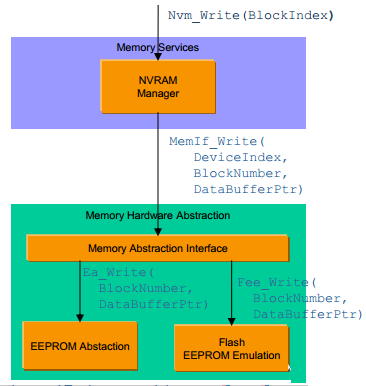
д»ҺдёҠеӣҫзңӢпјҢжңүдёӨз§Қжғ…еҪўжҲ–иҖ…ж–№жЎҲпјҡ
1. еҸӘжңүдёҖдёӘ NV device зұ»еһӢеңЁдҪҝз”Ё
зҺ°е®һдёӯеӨҡж•°жҳҜиҝҷз§Қжғ…еҶө . еңЁиҝҷз§Қжғ…еҶөдёӢпјҢеңЁжәҗд»Јз ҒеҸҜз”Ёзҡ„жғ…еҶөдёӢпјҢеҸҜд»Ҙе°Ҷ Memory Abstraction е®һзҺ°дёәеҝҪз•Ҙ DeviceIndex еҸӮж•°зҡ„з®ҖеҚ•е®ҸгҖӮ
MemIf.h:
#include вҖңEa.hвҖң /* for providing access to the EEPROM Abstraction */
// ...
#define MemIf_Write(DeviceIndex, BlockNumber, DataBufferPtr) \
Ea_Write(BlockNumber, DataBufferPtr) |
MemIf.c( дёҚйңҖиҰҒиҝҷдёӘж–Ү件)
дёҚйңҖиҰҒе…¶д»–д»Јз ҒпјҢ NVRAM Manager е®һйҷ…дёҠеҸҜд»ҘзӣҙжҺҘи®ҝй—® EA жҲ– FEE гҖӮ
2. жңүдёӨдёӘжҲ–жӣҙеӨҡдёҚеҗҢзұ»еһӢзҡ„ NV devices еңЁдҪҝз”Ё
еңЁиҝҷз§Қжғ…еҶөдёӢпјҢеҝ…йЎ»дҪҝз”ЁDeviceIndexйҖүжӢ©жӯЈзЎ®зҡ„NV Device гҖӮйҖҡиҝҮдҪҝз”ЁжҢҮеҗ‘еҠҹиғҪзҡ„жҢҮй’Ҳж•°з»„ жқҘ е®һзҺ° жҳҜ йқһеёёжңүж•Ҳ зҡ„ гҖӮд»ҘдёӢзӨәдҫӢд»…жҳҫзӨәеҶҷеҠҹиғҪпјҡ
File MemIf.h:
extern const WriteFctPtrType WriteFctPtr[2];
#define MemIf_Write(DeviceIndex, BlockNumber, DataBufferPtr) \
WriteFctPtr[DeviceIndex](BlockNumber, DataBufferPtr) |
File MemIf.c:
#include вҖңEa.hвҖң /* for getting the API function addresses */
#include вҖңFee.hвҖң /* for getting the API function addresses */
#include вҖңMemIf.hвҖң /* for getting the WriteFctPtrType */
const WriteFctPtrType WriteFctPtr[2] = {Ea_Write, Fee_Write}; |
дҪҝз”ЁеҗҢж ·зҡ„д»Јз Ғе’ҢиҝҗиЎҢж—¶пјҢе°ұеҘҪеғҸFunction Pointer TableжҳҜдҪҚдәҺ NVRAM Manager дёӯдёҖж ·гҖӮеҶ…еӯҳжҠҪиұЎжҺҘеҸЈдёҚдјҡдә§з”ҹд»»дҪ•ејҖй”ҖгҖӮ
иҝҷж ·:
1. жҠҪиұЎеұӮеҸҜд»Ҙйқһеёёжңүж•Ҳең°е®һзҺ°пјӣ 2. жҠҪиұЎеұӮеҸҜд»Ҙзј©ж”ҫпјӣ 3. Memory Abstraction Interfaceз®ҖеҢ–дәҶ NVRAM з®ЎзҗҶеҷЁеҜ№дёҖдёӘжҲ–еӨҡдёӘ EEPROM е’ҢFlash Deviceзҡ„и®ҝй—®гҖӮ
д»ҘдёҠжҳҜи®ІдәҶMemoryзҡ„жҺҘеҸЈж–№йқўзҡ„е®ҡд№үе’ҢдҪҝз”ЁпјҢеҗҺз»ӯеҶҚеҶҷдёӘж–Үз« пјҢдё“й—Ёи®Іи§ЈEAе’ҢEEPROMж–№йқўзҡ„еҶ…е®№гҖӮ 5 AUTOSAR еұӮд№Ӣй—ҙдәӨдә’пјҲCommunicationпјү
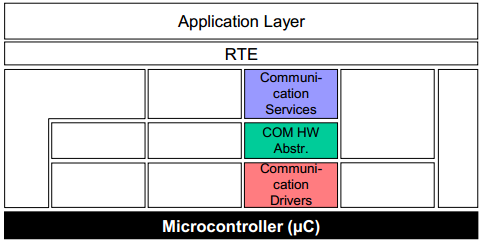
жҺҘдёӢжқҘи®ІдёӢCommunicationзҡ„жҺҘеҸЈпјҢдёӢеӣҫжҳҜйҖҡдҝЎжЁЎеқ—еңЁAUTOSARжһ¶жһ„зҡ„дҪҚзҪ®гҖӮ
д»ҘдёӢд»ҘPDURдёәдҫӢпјҢPDURжҳҜе•ҘзҺ©ж„ҸпјҹеҘҪдәҶпјҢе…ҲжқҘеӯҰд№ еҮ дёӘжҰӮеҝөпјҡ
| SDU |
SDUжҳҜвҖң Service Data UnitвҖқзҡ„зј©еҶҷгҖӮ е®ғжҳҜдёҠеұӮдј йҖ’зҡ„ж•°жҚ®пјҢеёҰжңүдј иҫ“ж•°жҚ®зҡ„иҜ·жұӮгҖӮ д№ҹжҳҜеңЁдёӢеұӮжҺҘ收д№ӢеҗҺжҸҗеҸ–е№¶дј йҖ’еҲ°дёҠеұӮзҡ„ж•°жҚ®гҖӮSDUжҳҜPDUзҡ„дёҖйғЁеҲҶгҖӮ |
| PCI |
PCIжҳҜвҖң Protocol Control InformationвҖқзҡ„зј©еҶҷгҖӮ йңҖиҰҒжӯӨдҝЎжҒҜжүҚиғҪе°ҶSDUд»Һзү№е®ҡеҚҸи®®еұӮзҡ„дёҖдёӘе®һдҫӢдј йҖ’еҲ°еҸҰдёҖе®һдҫӢгҖӮ дҫӢеҰӮгҖӮ е®ғеҢ…еҗ«жәҗе’Ңзӣ®ж ҮдҝЎжҒҜгҖӮ PCIз”ұеҸ‘йҖҒдҫ§зҡ„еҚҸи®®еұӮж·»еҠ пјҢ并еңЁжҺҘ收дҫ§еҶҚж¬Ўиў«еҲ йҷӨгҖӮ |
| PDU |
PDUжҳҜвҖң Protocol Data Unit вҖқзҡ„зј©еҶҷгҖӮPDUеҢ…еҗ«SDUе’ҢPCIгҖӮ еңЁдј иҫ“дҫ§пјҢPDUд»ҺдёҠеұӮдј йҖ’еҲ°дёӢеұӮпјҢеҗҺиҖ…е°ҶжӯӨPDUи§ЈйҮҠдёәе…¶SDUгҖӮ |
иҝҷдёӘж•°жҚ®жөҒжҳҜеҰӮдёӢеӣҫиҝҷж ·пјҡ

еҸҰеӨ–пјҢPDUе’ҢSDUзҡ„е‘ҪеҗҚ规еҲҷеҰӮдёӢпјҡ
еҜ№дәҺPDU: <bus prefix> <layer prefix> - PDU еҜ№дәҺSDU: <bus prefix> <layer prefix> - SDU
иҝҷдёӘ bus prefix е’Ң layer prefix еҸҜд»ҘзңӢд»ҘдёӢиЎЁж јжҸҸиҝ°:
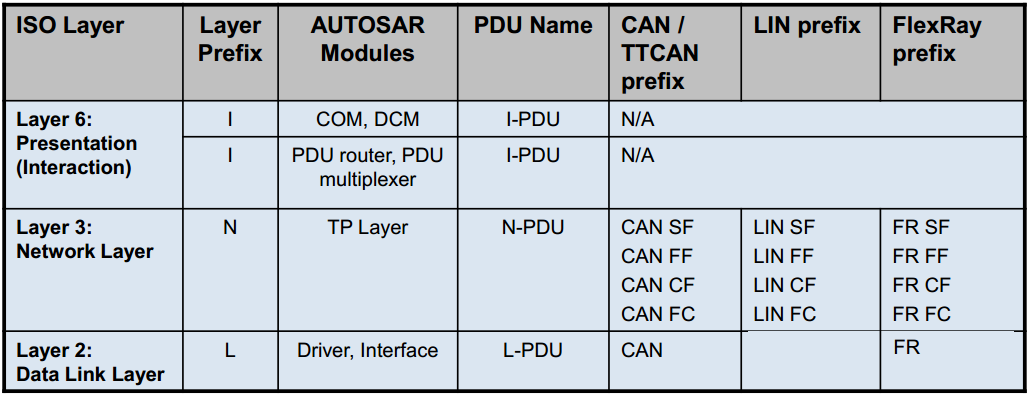
е…¶дёӯпјҢ SF : Single FrameпјҢ FF : First FrameпјҢ CF : Consecutive FrameпјҢ FC : Flow Control
дҫӢеҰӮпјҡ
- I-PDU or I-SDU
- CAN FF N-PDU жҲ–иҖ…FR CF N-SDU
- LIN L-PDU жҲ–иҖ…FR L-SDU
пјҲжңүе…іеё§зұ»еһӢзҡ„иҜҰз»ҶдҝЎжҒҜпјҢиҜ·еҸӮйҳ…CANпјҢTTCANпјҢLINе’ҢFlexRayзҡ„AUTOSARдј иҫ“еҚҸ议规иҢғгҖӮ пјү
д»ҘдёҠжҸҗеҲ°зҡ„PDURпјҢеҚіPDU RouterпјҢдёәдәҶи§ЈйҮҠиҝҷдёӘжЎҲдҫӢпјҢжҲ‘们е…ҲзңӢзңӢ е…ідәҺйҖҡдҝЎзҡ„组件жҸҸиҝ°пјҡ
PDU Routerпјҡ
-
жҸҗдҫӣдёҚеҗҢжҠҪиұЎйҖҡдҝЎжҺ§еҲ¶еҷЁе’ҢдёҠеұӮд№Ӣй—ҙзҡ„PDU Router
-
Routerзҡ„жҜ”дҫӢжҳҜECUзү№е®ҡзҡ„пјҲеҰӮжһңеҸӘжңүдёҖдёӘйҖҡи®ҜжҺ§еҲ¶еҷЁпјҢеҲҷдёҚиғҪзј©е°Ҹпјү
- е®һж—¶жҸҗдҫӣTPи·Ҝз”ұгҖӮеңЁзј“еҶІе…ЁйғЁTPж•°жҚ®д№ӢеүҚпјҢејҖе§ӢTPж•°жҚ®зҡ„дј иҫ“
COMпјҡ
- жҸҗдҫӣдёҚеҗҢI-PDUд№Ӣй—ҙзҡ„еҚ•дёӘдҝЎеҸ·жҲ–дёҖз»„дҝЎеҸ·зҡ„и·Ҝз”ұ
NM Coordinatorпјҡ
- йҖҡиҝҮNMеҚҸи°ғеҷЁеӨ„зҗҶзҡ„зҪ‘з»ңз®ЎзҗҶеҗҢжӯҘиҝһжҺҘеҲ°ECUзҡ„дёҚеҗҢйҖҡдҝЎйҖҡйҒ“зҡ„зҪ‘з»ңзҠ¶жҖҒ
Communication State Managersпјҡ
- йҖҡиҝҮжҺҘеҸЈеҗҜеҠЁе’Ңе…ій—ӯйҖҡдҝЎзі»з»ҹзҡ„硬件еҚ•е…ғ
- жҺ§еҲ¶PDUз»„
еҘҪдәҶпјҢзңӢзңӢиҝҷдёӘжһ¶жһ„зҡ„PDURеұӮд№Ӣй—ҙзҡ„дәӨдә’пјҡ
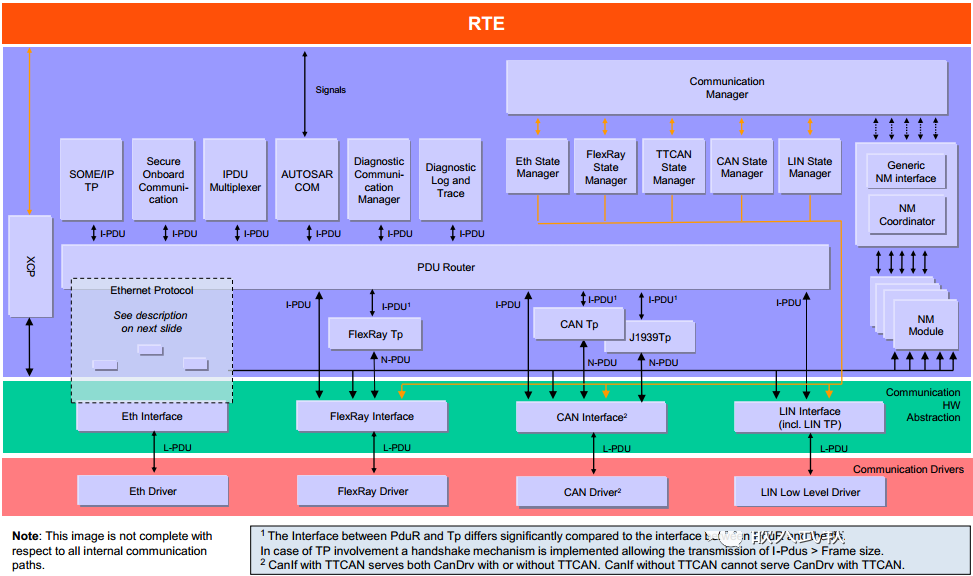
дёӢеӣҫжҳҫзӨәдәҶд»ҘеӨӘзҪ‘еҚҸи®®ж ҲеҶ…йғЁзҡ„зӣёдә’дҪңз”Ё

зңӢе®Ңд№ӢеҗҺпјҢд№ҹи®ёиҝҳжңүзӮ№жҮөйҖјгҖӮ еёҰзқҖд»ҘдёӢй—®йўҳпјҢеҒҡиҝӣдёҖжӯҘи®Іи§Ј
- иҪҜ件еұӮеҰӮдҪ•дәӨдә’пјҹ
- иҪҜ件InterfaceжҳҜжҖҺж ·зҡ„пјҹ
жЎҲдҫӢ
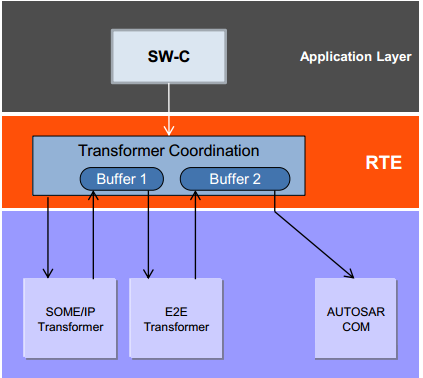
жӯӨзӨәдҫӢжҳҫзӨәдәҶе°Ҷж•°жҚ®иҪ¬жҚўз”ЁдәҺECUй—ҙйҖҡдҝЎж—¶зҡ„ж•°жҚ®жөҒгҖӮ
SW-Cе°Ҷй…ҚзҪ®дёәиҰҒеҸ‘йҖҒеҲ°иҝңзЁӢECUзҡ„ж•°жҚ®иҝӣиЎҢж•°жҚ®иҪ¬жҚўгҖӮжӯӨж•°жҚ®иҪ¬жҚўдёҚдҪҝз”Ёе°ұең°зј“еҶІеҢәеӨ„зҗҶгҖӮ
жңүд»ҘдёӢеҠҹиғҪ
- RTEе°ҶSOME/IPиҪ¬жҚўеҷЁз§°дёәй“ҫдёӯзҡ„第дёҖдёӘиҪ¬жҚўеҷЁпјҢ并д»ҺSW-Cдј иҫ“ж•°жҚ®гҖӮ
- SOME/IP иҪ¬жҚўеҷЁ жү§иЎҢиҪ¬жҚўе№¶ е°Ҷиҫ“еҮәпјҲеӯ—иҠӮж•°з»„пјүеҶҷе…ҘRTEжҸҗдҫӣзҡ„зј“еҶІеҢәгҖӮ
- д№ӢеҗҺпјҢRTEе°Ҷжү§иЎҢеңЁиҪ¬жҚўеҷЁй“ҫдёӯжҺ’第дәҢзҡ„е®үе…ЁиҪ¬жҚўеҷЁгҖӮе®үе…ЁиҪ¬еҢ–еҷЁзҡ„иҫ“е…ҘжҳҜSOME/IPиҪ¬еҢ–еҷЁзҡ„иҫ“еҮәгҖӮ
- е®үе…ЁиҪ¬жҚўеҷЁдҝқжҠӨж•°жҚ®пјҢ并е°Ҷиҫ“еҮәеҶҷе…ҘRTEжҸҗдҫӣзҡ„еҸҰдёҖдёӘзј“еҶІеҢәгҖӮз”ұдәҺдёҚдҪҝз”Ёе°ұең°зј“еҶІеҢәеӨ„зҗҶпјҢеӣ жӯӨйңҖиҰҒж–°зҡ„зј“еҶІеҢәгҖӮ
- RTEе°ҶжңҖз»Ҳзҡ„иҫ“еҮәж•°жҚ®дҪңдёәеӯ—иҠӮж•°з»„дј иҫ“еҲ°COMжЁЎеқ—гҖӮ
иҝӣдёҖжӯҘз ”з©¶жҺҘеҸЈ
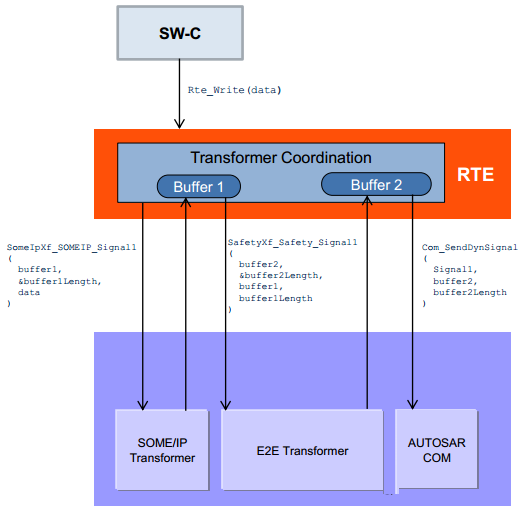
еңЁжһ¶жһ„дёҠпјҢRTEдҪҝз”ЁдҪҚдәҺSystem ServiceеұӮзҡ„иҪ¬жҚўеҷЁ
еңЁиҜҘжЎҲдҫӢдёӯпјҢиҪ¬жҚўеҷЁжңүд»ҘдёӢжҺҘеҸЈпјҡ
SomeIpXf_SOMEIP_Signal1
(
uint8 *buffer1,
uint16 *buffer1Length,
<type> data
)
SafetyXf_Safety_Signal1
(
uint8 *buffer2,
uint16 *buffer2Length,
uint8 *buffer1,
uint16 buffer1Length
) |
еҹәдәҺCOMзҡ„иҪ¬жҚў
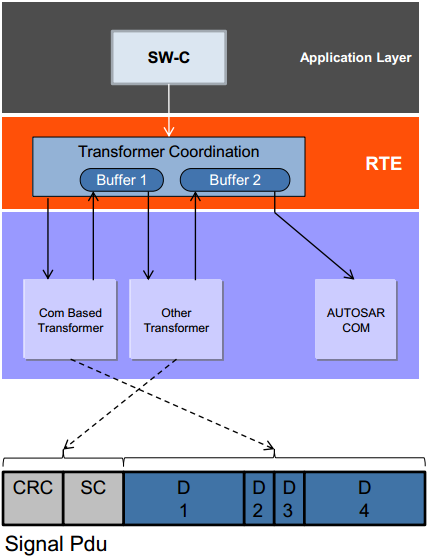
еҹәдәҺCOMзҡ„иҪ¬жҚўеҷЁеҹәдәҺеӣәе®ҡзҡ„йҖҡдҝЎзҹ©йҳөдёәиҪ¬жҚўеҷЁй“ҫжҸҗдҫӣеәҸеҲ—еҢ–еҠҹиғҪгҖӮ
еӣәе®ҡйҖҡдҝЎзҹ©йҳөе…Ғи®ёе°ҶдҝЎеҸ·дјҳеҢ–ж”ҫзҪ®еҲ°PDUдёӯпјҲдҫӢеҰӮпјҢBOOLж•°жҚ®еҸҜд»Ҙй…ҚзҪ®дёәд»…еҚ з”ЁPDUдёӯзҡ„дёҖдҪҚпјүгҖӮиҝҷж ·еҸҜд»ҘеңЁCanжҲ–LinзӯүдҪҺиҙҹиҪҪзҪ‘з»ңдёӯдҪҝз”ЁиҪ¬жҚўеҷЁй“ҫгҖӮ
е…·жңүд»ҘдёӢеҠҹиғҪ
- еҹәдәҺCOMзҡ„иҪ¬жҚўеҷЁжҳҜ第дёҖдёӘиҪ¬жҚўеҷЁпјҲеәҸеҲ—еҢ–еҷЁпјүпјҢ并йҖҡиҝҮRTEд»Һеә”з”ЁзЁӢеәҸиҺ·еҸ–ж•°жҚ®гҖӮ
- еҹәдәҺCOMй…ҚзҪ®пјҲйҖҡдҝЎзҹ©йҳөпјүпјҢд»Ҙе®Ңе…ЁдёҺCOMжЁЎеқ—зӣёеҗҢзҡ„ж–№ејҸеәҸеҲ—еҢ–ж•°жҚ®пјҲеӯ—иҠӮеәҸпјҢз¬ҰеҸ·жү©еұ•пјүгҖӮ
- е…¶д»–иҪ¬жҚўеҷЁеҸҜиғҪдјҡеўһеҠ е…·жңүCRCе’ҢеәҸеҲ—и®Ўж•°еҷЁпјҲSCпјүзҡ„жңүж•ҲиҙҹиҪҪгҖӮ
- еҸҳиҪ¬жҚўеҷЁжңүж•ҲиҙҹиҪҪйҖҡиҝҮCom_SendSignalGroupArray APIдҪңдёәдёҖдёӘеӯ—иҠӮж•°з»„дј йҖ’еҲ°COMжЁЎеқ—гҖӮ
- COMжЁЎеқ—еҸҜд»Ҙй…ҚзҪ®дёәж №жҚ®йҖҡдҝЎзҹ©йҳөе®ҡд№үжү§иЎҢдј иҫ“жЁЎејҸйҖүжӢ©гҖӮ
дёҠйқўзҡ„жҸҸиҝ°д№ҹи®ёжңүдәӣжҠҪиұЎпјҢеңЁе®һи·өдёӯдјҡжӣҙеҠ жё…жҷ°пјҢеҗҺз»ӯжҲ‘дјҡйҖҡиҝҮе®һйҷ…иҝҗз”ЁжқҘиҜҰз»Ҷең°и®Іи§ЈиҝҷдәӣзҹҘиҜҶзӮ№гҖӮ
|








