|
ه‰چ言ï¼ڑ
PDU Router(路由ه™¨ï¼‰هœ¨وœ¬و–‡ه°†ç®€ç§°ن¸؛PduR,考虑هˆ°ن¸ھن؛؛ه¯¹PduRو¨،ه—认识و·±ه؛¦وœ‰é™گ,ن¸”وژ¥è§¦çڑ„CANé€ڑ讯هٹں能è؟گ用PduRو¨،ه—هٹں能ن¹ں较简هچ•ï¼Œو‰€ن»¥وœ¬و–‡ن»…ه¯¹PduRو¨،ه—هپڑ简هچ•ن»‹ç»چم€‚
1.هں؛وœ¬و¦‚ه؟µ
首ه…ˆن؛†è§£ن¸‹ 路由 çڑ„و¦‚ه؟µï¼Œ 路由وک¯وŒ‡è·¯ç”±ه™¨ن»ژن¸€ن¸ھوژ¥هڈ£ن¸ٹو”¶هˆ°و•°وچ®هŒ…,و ¹وچ®و•°وچ®هŒ…çڑ„ç›®çڑ„هœ°ه€è؟›è،Œه®ڑهگ‘ه¹¶è½¬هڈ‘هˆ°هڈ¦ن¸€ن¸ھوژ¥هڈ£çڑ„è؟‡ç¨‹ (ه¼•è‡ھ百ه؛¦ç™¾ç§‘)م€‚ وژ¥ç€ن؛†è§£ن¸‹PduRو›´ه¤ڑçڑ„ن½œç”¨ï¼Œه¼•è‡ھ[1]ï¼ڑPduRو¨،ه—وڈگن¾›è·¯ç”±I-PDU(Interaction Layer Protocol Data Units)وœچهٹ،,ن½؟用هœ¨é€ڑ讯وژ¥هڈ£و¨،ه—(و¯”ه¦‚CanIf,CanNM,FrIf)ه’Œن¼ 输هچڈè®®و¨،ه—(و¯”ه¦‚CanTp,COMه’ŒDCM),ه¦‚ن¸‹ه›¾1و‰€ç¤؛م€‚ه¸¸ç”¨çڑ„PDU路由ن½؟用و¨،ه—وœ‰ï¼ڑن¸ژUDSوœچهٹ،相ه…³çڑ„AUTOSAR è¯ٹو–é€ڑ讯ç®،çگ†و¨،ه—(Diagnostic Communication Manager,DCM)ه’Œن¼ 输هچڈè®®و¨،ه—,ن¸ژCANé€ڑ讯相ه…³çڑ„AUTOSAR COM,é€ڑ讯هچڈè®®و¨،ه—ç‰م€‚
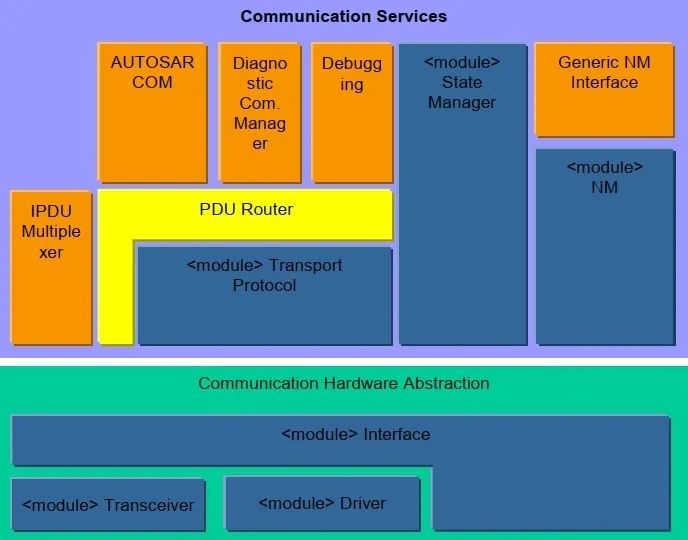
ه›¾1 AUTOSARو¶و„ن¸‹çڑ„PduRو¨،ه—,ه¼•è‡ھ[1] PduRن¸»è¦پç”±2部هˆ†ç»„وˆگï¼ڑ
- PduR路由è،¨ï¼ڑé™و€پ路由è،¨وڈڈè؟°و¯ڈن¸ھ被路由çڑ„I-PDUçڑ„路由ه±و€§ï¼›I-PDU路由çڑ„و‰§è،Œوک¯هں؛ن؛ژé™و€په®ڑن¹‰çڑ„I-PDU IDم€‚
- PduRه¼•و“ژï¼ڑو ¹وچ®PduR路由è،¨و‰§è،Œè·¯ç”±هٹ¨ن½œçڑ„ه®é™…ن»£ç پ,该ه¼•و“ژن¸چه¾—ن¸چ路由I-PDUن»ژو؛گه¤´هˆ°ç›®çڑ„هœ°ï¼Œن»¥هڈٹو ¹وچ®I-PDU IDçڑ„و؛گه¤´ç؟»è¯‘ه…¶ç›®çڑ„هœ°م€‚
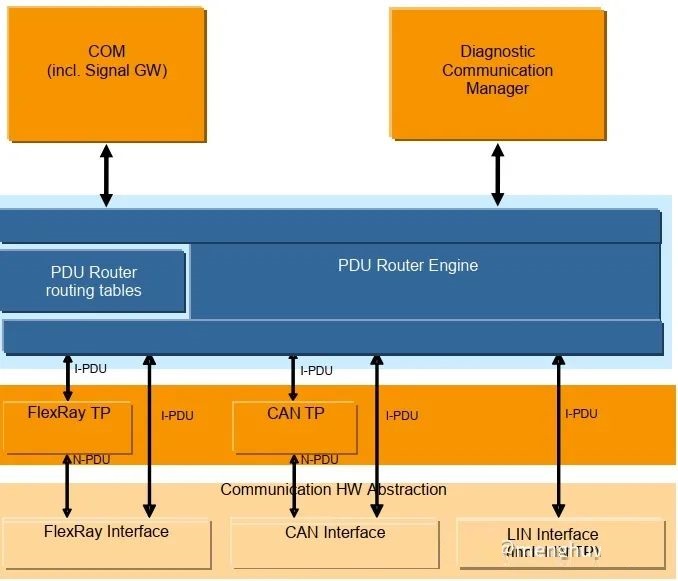
ه›¾2 PduRو¨،ه—çڑ„组وˆگ,ه¼•è‡ھ[1] é€ڑè؟‡ن»¥ن¸ٹçں¥è¯†ه¯¹ه؛”هˆ°CANé€ڑ讯, ه°±وک¯PduRو¨،ه—ن»ژCANوژ¥هڈ£و¨،ه—/COMو¨،ه—وژ¥و”¶هˆ°ن؛†PDU,然هگژو ¹وچ®PDU IDوں¥و‰¾ه·²ه®ڑن¹‰ه¥½çڑ„é™و€پ路由è،¨ï¼Œèژ·ه¾—ه…¶ç›®و ‡هœ°ه€ï¼Œه®ڑهگ‘ه¹¶è½¬هڈ‘هˆ°COMو¨،ه—/CANوژ¥هڈ£و¨،ه—,هچ³è·¯ç”±PDU,و•…称ن¸؛PDU Routerم€‚
2.هڈ‘é€پن¸ژوژ¥و”¶و“چن½œ
ن»ژCANé€ڑ讯çڑ„هڈ‘é€پن¸ژوژ¥و”¶و¥çœ‹ï¼Œه†چو¥çگ†è§£ن¸‹PduRو¨،ه—çڑ„ن½œç”¨ï¼Œهچ³ï¼ڑ
- هڈ‘é€پو—¶ï¼ŒPduRو¨،ه—ه°†و¥è‡ھCOMو¨،ه—çڑ„هڈ‘é€پ请و±‚路由هˆ°Canوژ¥هڈ£و¨،ه—,ه°†و¥è‡ھCanوژ¥هڈ£و¨،ه—çڑ„ç،®è®¤è·¯ç”±هˆ°COMو¨،ه—,ه¦‚ن¸‹ه›¾3م€‚
- وژ¥و”¶و—¶ï¼ŒPduRو¨،ه—ه°†و¥è‡ھCanوژ¥هڈ£و¨،ه—çڑ„é€ڑçں¥è·¯ç”±هˆ°COMو¨،ه—,ه¦‚ن¸‹ه›¾4م€‚
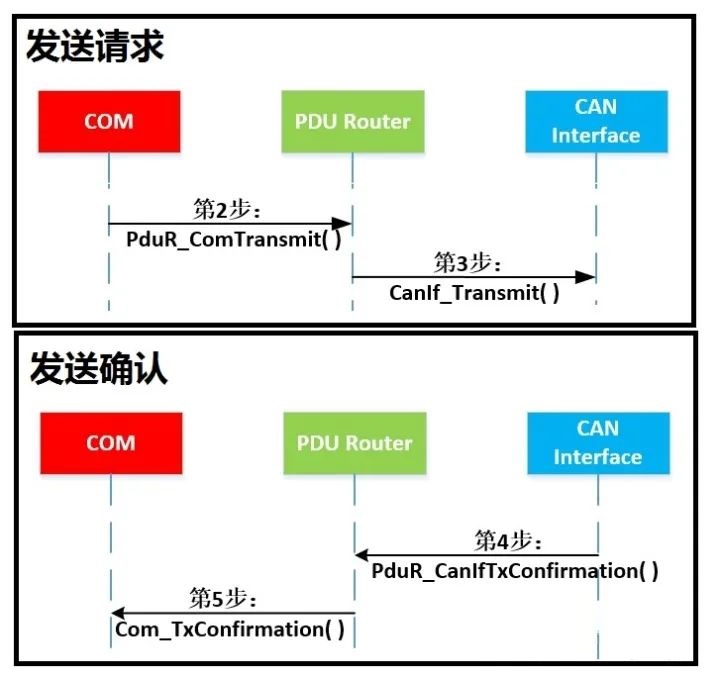
ه›¾3
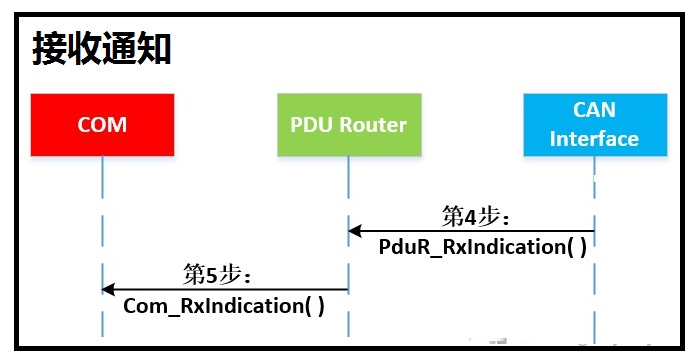
ه›¾4 ن¸‹é¢ه€ںهٹ©و–‡و،£ن؛†è§£ن¸‹ن¸ٹè؟°ه‡½و•°çڑ„ه®ڑن¹‰ï¼Œهڈ‘é€پ请و±‚ه‡½و•°ه¦‚ن¸‹ه›¾5و‰€ç¤؛ï¼ڑ
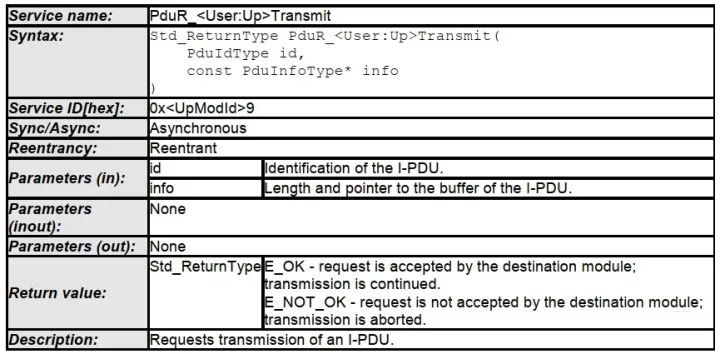
ه›¾5 هڈ‘é€پ请و±‚ه‡½و•°ï¼Œه¼•è‡ھ[1}
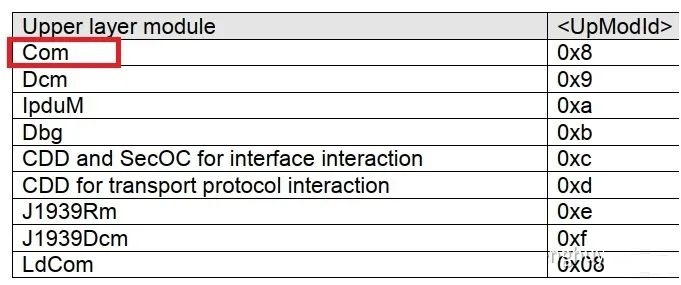
و³¨و„ڈUser:Upن¸ژه½“ه‰چçڑ„هٹں能وœ‰ه…³ï¼ŒCANé€ڑ讯çڑ„è¯ï¼ŒUser:Upن¸؛Com,هچ³هڈ‘é€پو—¶ï¼ŒCOMو¨،ه—调用PduR_ComTransmitه‡½و•°م€‚ه½“然ن½œن¸؛PduRو¨،ه—çڑ„ه‡½و•°ï¼Œن¼ڑو ¹وچ®ن¸چهگŒهٹں能路由هˆ°ه…¶ن»–و¨،ه—,è‡ھ然需è¦پ采用è؟™ç§چه®ڑن¹‰و–¹ه¼ڈم€‚هگŒو ·هœ°هڈ‘é€پç،®è®¤ه‡½و•°ه’Œوژ¥و”¶é€ڑçں¥ه‡½و•°ن¹ںن¸€و ·م€‚
ه¼•è‡ھ[1] هڈ‘é€پç،®è®¤ه‡½و•°çڑ„ه®ڑن¹‰ه¦‚ن¸‹ه›¾6,
ه…¶ن¸Userï¼ڑLoçڑ„ه®ڑن¹‰ه¦‚ن¸‹è،¨ï¼Œهڈ‘é€پو—¶ï¼ŒCanوژ¥هڈ£و¨،ه—调用PduR_CanIfTxConformationه‡½و•°هگ‘ن¸ٹç،®è®¤م€‚
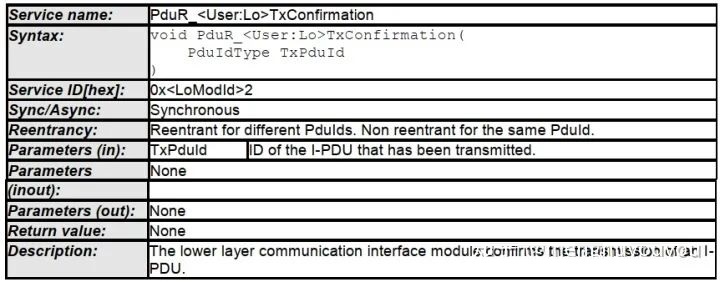
ه›¾6 هڈ‘é€پç،®è®¤ه‡½و•°ï¼Œه¼•è‡ھ[1]
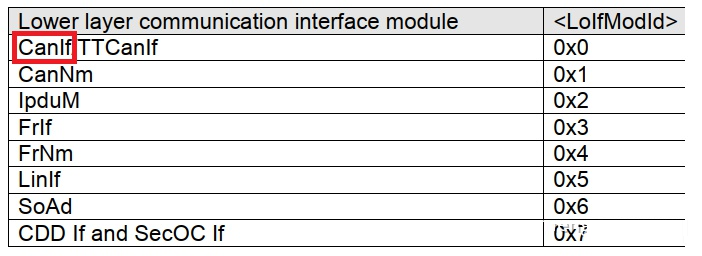
وژ¥و”¶é€ڑçں¥ه‡½و•°çڑ„ه®ڑن¹‰ه¦‚ن¸‹ه›¾7,ه…¶ن¸Userï¼ڑLoçڑ„ه®ڑن¹‰ه¦‚ن¸ٹè،¨ï¼Œهچ³Canوژ¥هڈ£و¨،ه—调用PduR_CanIfRxIndicationه‡½و•°م€‚هœ¨و¤ه°±هڈ‘çژ°ه›¾4用PduR_RxIndicationه‡½و•°ه°±ن¸چه¤ںه‡†ç،®ه’¯م€‚
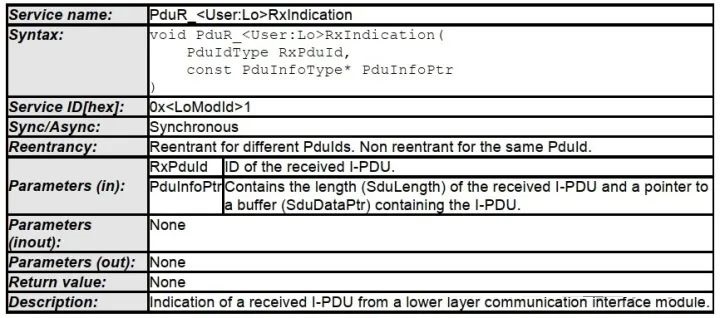
ه›¾7 وژ¥و”¶é€ڑçں¥ه‡½و•°ï¼Œه¼•è‡ھ[1]
3.路由è،¨
ç›®ه‰چ觉ه¾—PduRو¨،ه—وœ€ه…³é”®è؟کوک¯è·¯ç”±è،¨çڑ„ه®ڑن¹‰ï¼Œن¸€وک¯è·¯ç”±è·¯ه¾„çڑ„ç،®ه®ڑ,ن؛Œوک¯ç”±و؛گه¤´IDهˆ°ç›®çڑ„هœ°IDçڑ„ç،®ه®ڑم€‚特و¤ه†چه¼•ç”¨ن¸¤ن¾‹è¯´وکژ,ه¦‚ن¸‹ه›¾8م€پ9م€‚
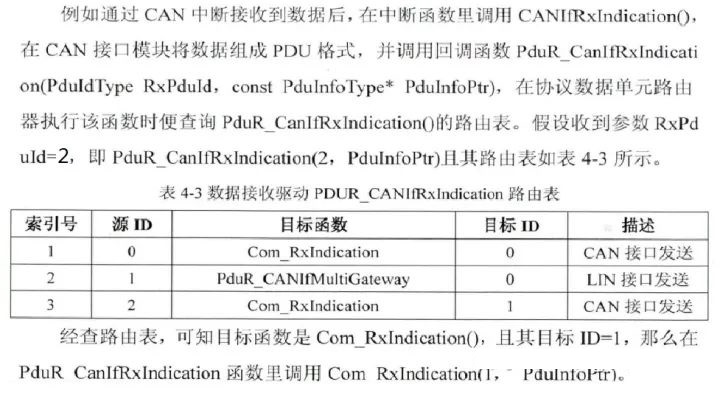
ه›¾8 وژ¥و”¶é€ڑçں¥è·¯ç”±ï¼Œه¼•è‡ھ[2]
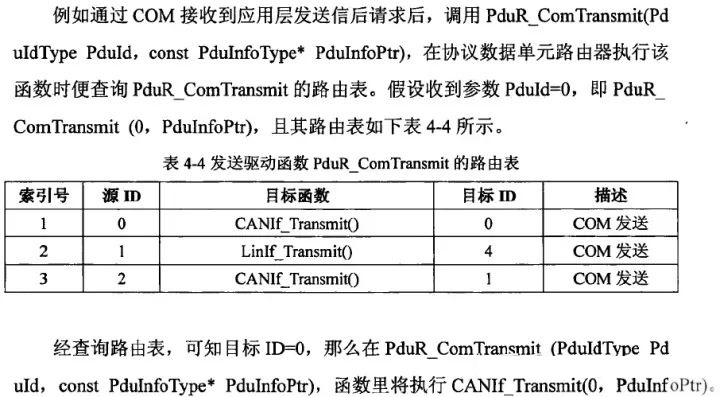
ه›¾9 هڈ‘é€پ请و±‚路由,ه¼•è‡ھ[2]
ن»¥ن¸ٹه°±وک¯ç®€هچ•ن»‹ç»چن؛†PduRو¨،ه—هœ¨CANé€ڑ讯çڑ„هڈ‘é€پن¸ژوژ¥و”¶و‰€èµ·çڑ„ن½œç”¨ï¼Œه½“هگ‘ن¸ٹè؟›ه…¥COMه±‚هگژ,简هچ•هœ°è¯´ه°±وک¯ï¼ڑوژ¥و”¶و—¶ï¼Œه°†PDU解هŒ…وˆگن¸€ن¸ھن¸€ن¸ھçڑ„ن؟،هڈ·ï¼Œن¾›ASWن½؟用;هڈ‘é€پو—¶ï¼Œه°†ن¸€ن¸ھن¸€ن¸ھçڑ„ن؟،هڈ·و‰“هŒ…وˆگPDU,هگ‘ن¸‹هڈ‘é€پم€‚
|








