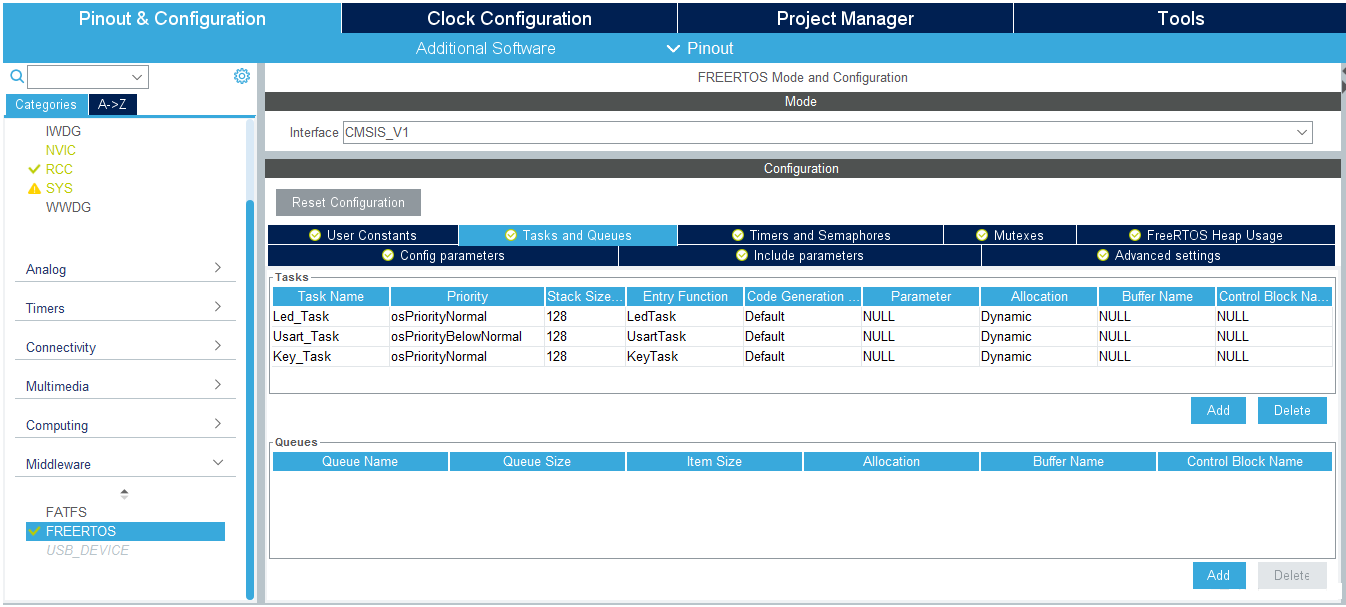
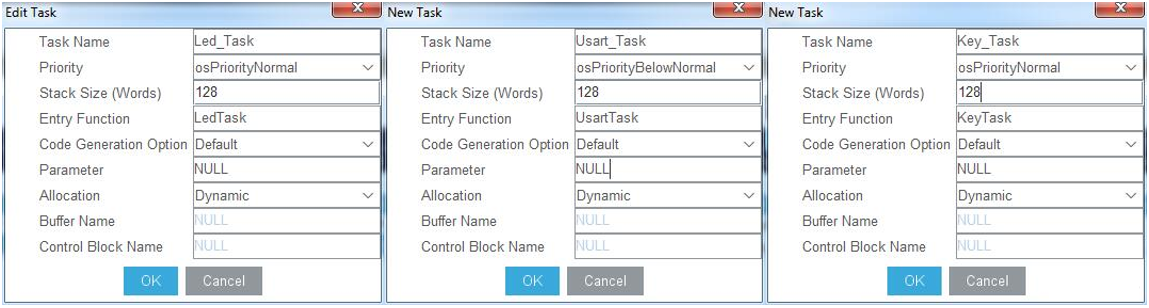
void Led_Task(void const * argument){
for(;;){
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_1,GPIO_PIN_RESET);
osDelay(500);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_1,GPIO_PIN_SET);
osDelay(500);
}
}
void Usart_Task(void const * argument){
for(;;){
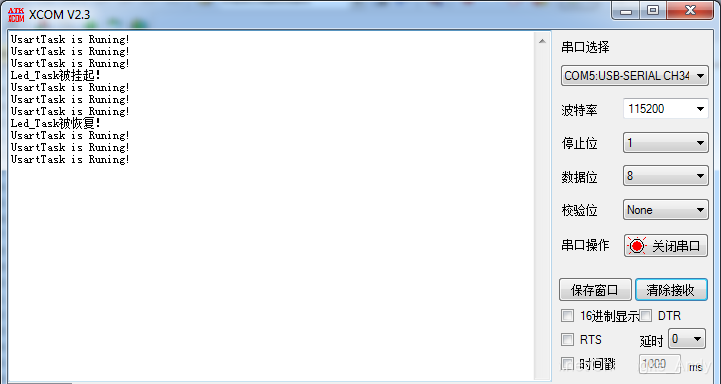
printf("UsartTask is Runing!\r\n");
osDelay(1000);
}
}
void KeyTask(void const * argument){
uint8_t key = 0;
for(;;){
key = KEY_Scan(0);
switch(key){
case KEY_UP_PRES:
vTaskSuspend(Led_TaskHandle);
printf("Led_Task被挂起!\r\n");
key = 0;
break;
case KEY_DOWN_PRES:
vTaskResume(Led_TaskHandle);
printf("Led_Task被恢复!\r\n");
key = 0;
break;
}
osDelay(10);
}
}