图像边缘检测是计算机视觉和图像处理中的一项基本任务,它用于识别图像中亮度变化明显的区域,这些区域通常对应于物体的边界。
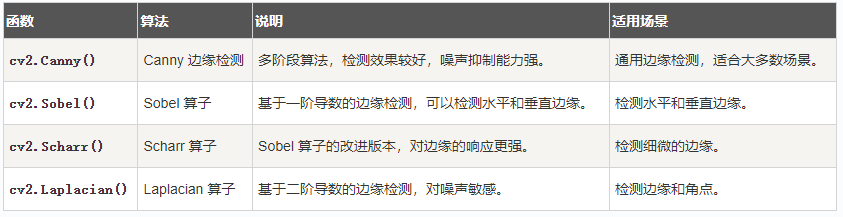
是 OpenCV 中常用的边缘检测函数及其说明:
1. Canny 边缘检测 (cv2.Canny())
Canny 边缘检测是一种多阶段的边缘检测算法,由 John F. Canny 在 1986
年提出。
Canny 边缘检测被认为是边缘检测的"金标准",因为它能够在噪声抑制和边缘定位之间取得良好的平衡。
1.1 Canny 边缘检测的步骤
Canny 边缘检测算法主要包括以下几个步骤:
1.噪声抑制:使用高斯滤波器对图像进行平滑处理,以减少噪声的影响。
2.计算梯度:使用 Sobel 算子计算图像的梯度幅值和方向。
3.非极大值抑制:沿着梯度方向,保留局部梯度最大的像素点,抑制其他像素点。
4.双阈值检测:使用两个阈值(低阈值和高阈值)来确定真正的边缘。高于高阈值的像素点被认为是强边缘,低于低阈值的像素点被抑制,介于两者之间的像素点如果与强边缘相连则保留。
5.边缘连接:通过滞后阈值处理,将弱边缘与强边缘连接起来,形成完整的边缘。
1.2 使用 OpenCV 实现 Canny 边缘检测
在 OpenCV 中,可以使用 cv2.Canny() 函数来实现 Canny 边缘检测。
该函数的原型如下:
edges = cv2.Canny(image, threshold1, threshold2, apertureSize=3, L2gradient=False) |
image:输入图像,必须是单通道的灰度图像。
threshold1:低阈值。
threshold2:高阈值。
apertureSize:Sobel 算子的孔径大小,默认为 3。
L2gradient:是否使用 L2 范数计算梯度幅值,默认为 False(使用 L1 范数)。
实例
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# 应用 Canny 边缘检测
edges = cv2.Canny(image, 100, 200)
# 显示结果
cv2.imshow('Canny Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
| 2. Sobel 算子 (cv2.Sobel())
Sobel 算子是一种基于梯度的边缘检测算子,它通过计算图像在水平和垂直方向上的梯度来检测边缘。
Sobel 算子结合了高斯平滑和微分操作,因此对噪声具有一定的抑制作用。
2.1 Sobel 算子的原理
Sobel 算子使用两个 3x3 的卷积核分别计算图像在水平和垂直方向上的梯度:
水平方向的卷积核: [-1, 0, 1]
[-2, 0, 2]
[-1, 0, 1] |
垂直方向的卷积核: [-1, -2, -1]
[ 0, 0, 0]
[ 1, 2, 1] |
通过这两个卷积核,可以分别得到图像在水平和垂直方向上的梯度 Gx 和 Gy。最终的梯度幅值可以通过以下公式计算:
2.2 使用 OpenCV 实现 Sobel 算子
在 OpenCV 中,可以使用 cv2.Sobel() 函数来计算图像的梯度。该函数的原型如下:
dst = cv2.Sobel(src, ddepth, dx, dy, ksize=3, scale=1, delta=0, borderType=cv2.BORDER_DEFAULT) |
src:输入图像。
ddepth:输出图像的深度,通常使用 cv2.CV_64F。
dx:x 方向上的导数阶数。
dy:y 方向上的导数阶数。
ksize:Sobel 核的大小,默认为 3。
scale:缩放因子,默认为 1。
delta:可选的 delta 值,默认为 0。
borderType:边界填充类型,默认为 cv2.BORDER_DEFAULT。
实例
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# 计算 x 方向的梯度
sobel_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
# 计算 y 方向的梯度
sobel_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
# 计算梯度幅值
sobel_combined = np.sqrt(sobel_x**2 + sobel_y**2)
# 显示结果
cv2.imshow('Sobel X', sobel_x)
cv2.imshow('Sobel Y', sobel_y)
cv2.imshow('Sobel Combined', sobel_combined)
cv2.waitKey(0)
cv2.destroyAllWindows()
|
3. Laplacian 算子 (cv2.Laplacian())
Laplacian 算子是一种二阶微分算子,它通过计算图像的二阶导数来检测边缘。Laplacian
算子对噪声比较敏感,因此通常在使用之前会对图像进行高斯平滑处理。
3.1 Laplacian 算子的原理
Laplacian 算子使用以下卷积核来计算图像的二阶导数:
[ 0, 1, 0]
[ 1, -4, 1]
[ 0, 1, 0] |
通过这个卷积核,可以得到图像的 Laplacian 值。Laplacian 值较大的区域通常对应于图像的边缘。
3.2 使用 OpenCV 实现 Laplacian 算子
在 OpenCV 中,可以使用 cv2.Laplacian() 函数来计算图像的 Laplacian
值。
该函数的原型如下:
dst = cv2.Laplacian(src, ddepth, ksize=1, scale=1, delta=0, borderType=cv2.BORDER_DEFAULT) |
src:输入图像。
ddepth:输出图像的深度,通常使用 cv2.CV_64F。
ksize:Laplacian 核的大小,默认为 1。
scale:缩放因子,默认为 1。
delta:可选的 delta 值,默认为 0。
borderType:边界填充类型,默认为 cv2.BORDER_DEFAULT。
实例
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# 应用 Laplacian 算子
laplacian = cv2.Laplacian(image, cv2.CV_64F)
# 显示结果
cv2.imshow('Laplacian', laplacian)
cv2.waitKey(0)
cv2.destroyAllWindows()
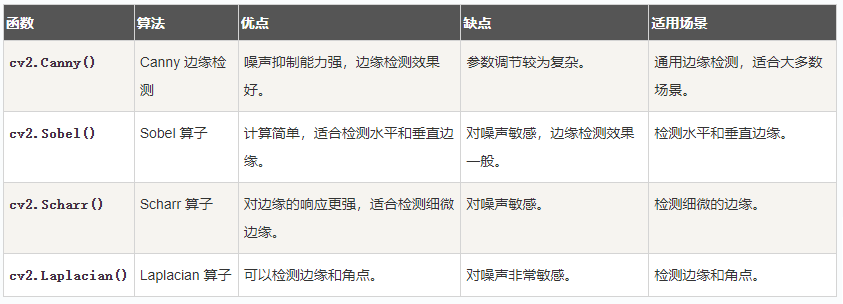
| 常用边缘检测函数对比
以下是 OpenCV 中常用边缘检测函数的对比:
|








