1 AUTOSARçڑ„解ه†³و–¹و،ˆ
ن¹‹ه‰چçڑ„و–‡ç« م€ٹ è€پو؟说é،¹ç›®è¦پن¸ٹAUTOSAR,وˆ‘و…Œه¾—ن¸€و‰¹ م€‹è®²هˆ°ن؛†ï¼Œé¢ه¯¹و—¥ç›ٹه¤چو‚çڑ„و±½è½¦E/Eو¶و„,هœ¨و¬§و´²ه¤§هœ°ن¸ٹè¯ç”ںçڑ„AUTOSAR组织,وڈگه‡؛ن؛†è§£ه†³و–¹و،ˆم€‚
而ن¸”هپڑن؛†و ‡ه‡†هŒ–ï¼ڑ
- 软ن»¶وژ¥هڈ£
- ن؛¤وچ¢و ¼ه¼ڈ
- و–¹و³•è®؛
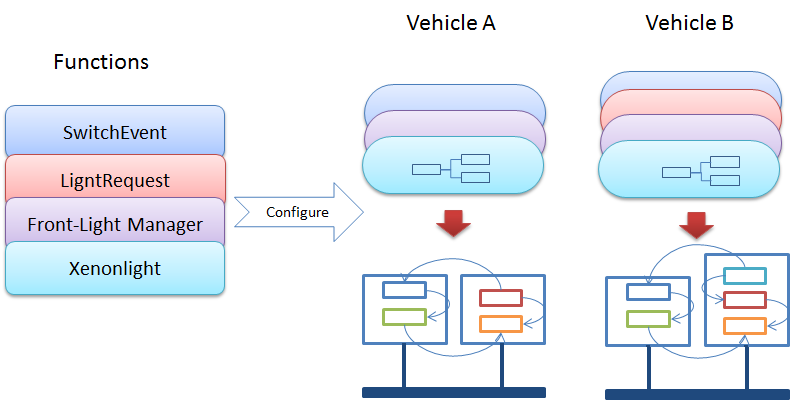
首ه…ˆï¼Œه…¶ç›®و ‡è¦پï¼ڑ
软ن»¶هٹں能و¨،ه—هœ¨ن¸چهگŒè½¦ه‹ن¹‹é—´è¢«é‡چ用
è؟کوœ‰ï¼Œو ‡ه‡†هŒ–AUTOSARçڑ„ن»£ç پé…چç½®/ه»؛و¨،ه·¥ه…·
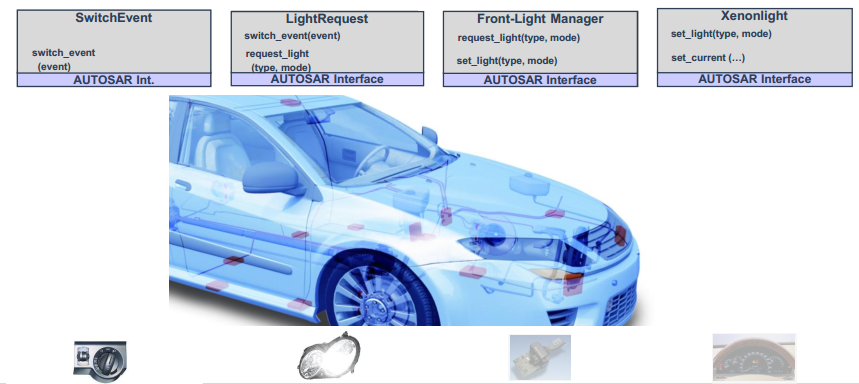
و ‡ه‡†هŒ–وژ¥هڈ£ï¼ˆن¹ںهڈ¯è§پن¸ٹه›¾ï¼‰ï¼ڑ
| AUTOSAR Interface |
“ AUTOSAR Interfaceâ€ه®ڑن¹‰ن؛†è½¯ن»¶ç»„ن»¶ه’Œ/وˆ–BSWو¨،ه—ن¹‹é—´ن؛¤وچ¢çڑ„ن؟،وپ¯م€‚该وڈڈè؟°ç‹¬ç«‹ن؛ژ特ه®ڑçڑ„编程è¯è¨€ï¼ŒECUوˆ–网络وٹ€وœ¯م€‚ |
| Standardized AUTOSAR Interface |
“ Standardized AUTOSAR Interfaceâ€وک¯ه…¶è¯و³•ه’Œè¯ن¹‰هœ¨AUTOSARن¸و ‡ه‡†هŒ–çڑ„“ AUTOSAR Interfaceâ€م€‚“ Standardized AUTOSAR Interfaceâ€é€ڑه¸¸ç”¨ن؛ژه®ڑن¹‰AUTOSARوœچهٹ،,è؟™وک¯AUTOSARهں؛وœ¬è½¯ن»¶هگ‘ه؛”用程ه؛ڈ软ن»¶ç»„ن»¶وڈگن¾›çڑ„و ‡ه‡†هŒ–وœچهٹ،م€‚ |
| Standardized Interface |
“ Standardized Interface â€وک¯ن¸€ç§چهœ¨AUTOSARن¸و ‡ه‡†هŒ–çڑ„API,و— 需ن½؟用“ AUTOSAR Interfaceâ€وٹ€وœ¯م€‚è؟™ن؛›â€œ Standardized Interface â€é€ڑه¸¸وک¯ن¸؛特ه®ڑçڑ„编程è¯è¨€ï¼ˆه¦‚“ Câ€ï¼‰ه®ڑن¹‰çڑ„م€‚ |
ن؛¤وچ¢و ¼ه¼ڈو ‡ه‡†هŒ–(arxml)
arxmlهˆ°ه؛•é•؟ن»€ن¹ˆو ·ï¼ںن»¥ن¸‹وˆھهڈ–ن¸€و®µو¥ç†ںو‚‰ن¸‹ï¼ڑ
<AUTOSAR>
<AR-PACKAGES>
<AR-PACKAGE>
<SHORT-NAME>DataTypes</SHORT-NAME>
<ELEMENTS>
<IMPLEMENTATION-DATA-TYPE>
<SHORT-NAME>uint8</SHORT-NAME>
<CATEGORY>VALUE</CATEGORY>
<SW-DATA-DEF-PROPS>
<SW-DATA-DEF-PROPS-VARIANTS>
<SW-DATA-DEF-PROPS-CONDITIONAL>
<BASE-TYPE-REF DEST="SW-BASE-TYPE">/DataTypes/BaseTypes/uint8</BASE-TYPE-REF>
<SW-CALIBRATION-ACCESS>NOT-ACCESSIBLE</SW-CALIBRATION-ACCESS>
<DATA-CONSTR-REF DEST="DATA-CONSTR">/DataTypes/DataConstrs/uint8_DataConstr</DATA-CONSTR-REF>
</SW-DATA-DEF-PROPS-CONDITIONAL>
</SW-DATA-DEF-PROPS-VARIANTS>
</SW-DATA-DEF-PROPS>
<TYPE-EMITTER>Platform_Type</TYPE-EMITTER>
</IMPLEMENTATION-DATA-TYPE>
// 部هˆ†ه†…ه®¹çœپç•¥
</ELEMENTS>
</AR-PACKAGE>
</AR-PACKAGES>
</AR-PACKAGE>
</AR-PACKAGES>
</AUTOSAR> |
ه†چو¥çœ‹çœ‹ه…¶ن»–ه‡ ن¸ھهں؛وœ¬و¦‚ه؟µï¼ڑ
SWC
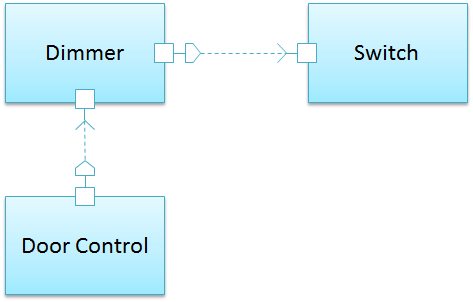
SWC,هچ³Software Component, وک¯ه°پ装ن؛†éƒ¨هˆ†وˆ–者ه…¨éƒ¨و±½è½¦ç”µهگهٹں能çڑ„و¨،ه—,ه…¶ هŒ…و‹¬ن؛†ه…¶ه…·ن½“çڑ„هٹں能ه®çژ°ن»¥هڈٹن¸ژه¯¹ه؛”çڑ„وڈڈè؟°م€‚ ن¾‹ه¦‚,وˆ‘ن»¬هڈ¯ن»¥وٹٹDimmerم€پSwitchم€پDoor Control设è®،وˆگSWC
SWCهˆ†ç±»ï¼ڑ
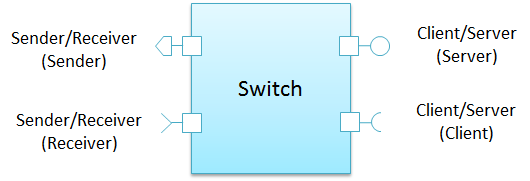
Port
Portوک¯SWCن¹‹é—´é€ڑن؟،用,算وک¯SWCçڑ„组وˆگ部هˆ†م€‚
Portهˆ†ن¸¤ه¤§ç±»ï¼ڑS/R(Sender/Receiver)ه’ŒC/S(Client/Server)
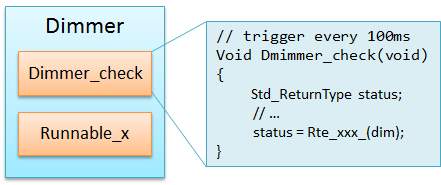
Runnables
Runnables,هچ³Runnable entities,ن¹ںوک¯SWCçڑ„组وˆگ部هˆ†ï¼Œن½†ه®ƒوک¯è؟گè،Œهœ¨RTE里é¢ï¼Œç”±RTEه‘¨وœںن؛‹ن»¶è§¦هڈ‘وˆ–者ه…¶ن»–ن؛‹ن»¶è§¦هڈ‘و—¶è°ƒç”¨م€‚RunnableهŒ…هگ«ç€ه®é™…è؟گè،Œçڑ„ه‡½و•°م€‚
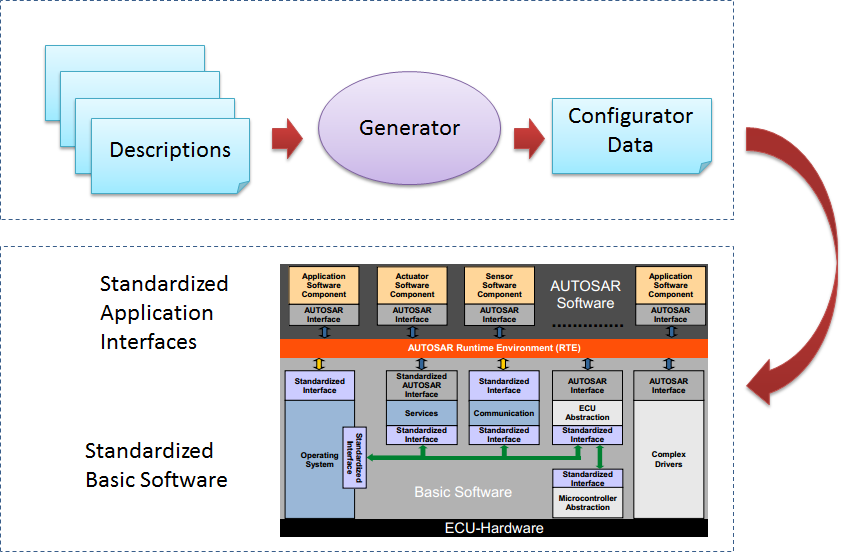
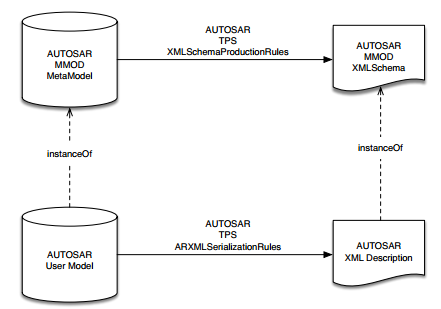
2 AUTOSARçڑ„و–¹و³•è®؛
و–¹و³•è®؛,هڈ¯ن»¥è¯´وک¯AUTOSARçڑ„çپµé‚,ه°±هƒڈن¸€éپ“èڈœçڑ„é…چو–™ه’Œو–¹و³•ï¼Œه¦‚وœو²،وœ‰è؟™ن¸ھو–¹و³•ï¼Œé‚£ن¹ˆé£ںوگن»…ن»…وک¯é£ںوگ,而ن¸چوک¯ن¸€éپ“ç¾ژه‘³çڑ„èڈœè‚´م€‚
و—¢ç„¶ï¼Œè¯´و–¹و³•è®؛وک¯AUTOSARçڑ„çپµé‚,那ن¹ˆن»€ن¹ˆèƒ½و‰؟è½½è؟™ن¸ھçپµé‚,و²،وœ‰è½½ن½“çڑ„çپµé‚ه°±وک¯ه¤é‚é‡ژ鬼ه•ٹم€‚ARXMLه°±èƒ½و‹…و¤é‡چن»»م€‚ه…¶ه®ï¼ŒARXMLوœ¬è´¨ه°±وک¯XMLو ¼ه¼ڈçڑ„و–‡وœ¬ï¼Œهڈھوک¯è¢«AUTOSAR组织ه°†ه…¶وٹ«ن¸ٹن¸€ن»¶ç¾ژن¸½çڑ„ه¤–è،£م€‚ و–¹و³•è®؛ه…·ن½“وœ‰ه“ھن؛›è¦پو±‚ه‘¢ï¼ںè§پن¸‹ه›¾
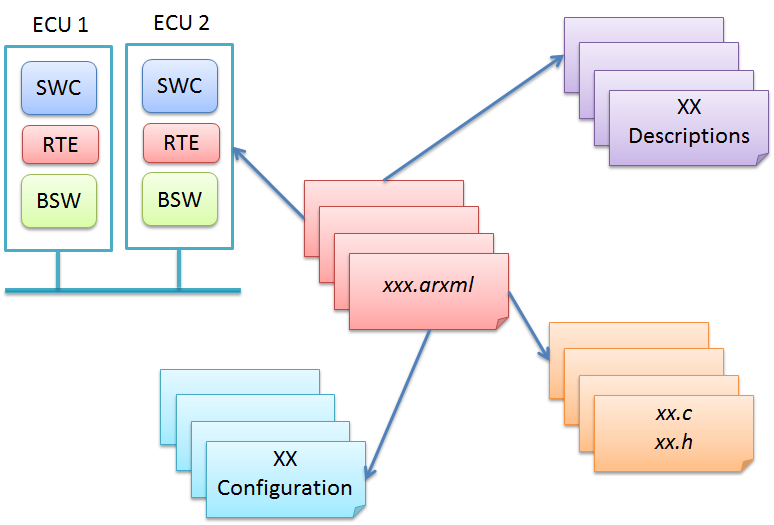
و–¹و³•è®؛وڈڈè؟°ن؛†ن»ژç³»ç»ںه؛•ه±‚é…چç½®هˆ°ECUهڈ¯و‰§è،Œن»£ç پن؛§ç”ںè؟‡ç¨‹çڑ„设è®،و¥éھ¤م€‚و‰€ن»¥ï¼Œè؟™ن¸ھARXMLو–‡ن»¶ن¹ںوک¯وŒ؛ه¤چو‚çڑ„م€‚وˆ‘ن»¬ه…ˆçœ‹ن¸ھه›¾و„ںهڈ—ن¸‹ï¼ڑ
è؟™ن¸ھARXMLه…³èپ”ç€و•´ن¸ھه¼€هڈ‘çڑ„و–¹و–¹é¢é¢
è؟™ن¸ھه¼€هڈ‘è؟‡ç¨‹ç®€هچ•وٹ½è±،èµ·و¥ه°±هƒڈï¼ڑ
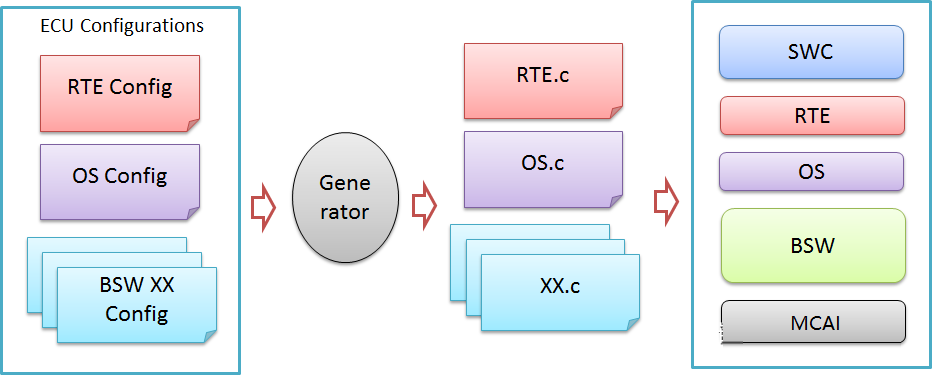
وٹ½هڈ–ه…¶ن¸BSWçڑ„é…چç½®ه’Œç”ںوˆگè؟‡ç¨‹و¥çœ‹çœ‹
3 AUTOSARçڑ„ه®و—¶çژ¯ه¢ƒ
RTE,Run Time Environmentه®و—¶è؟گè،Œçژ¯ه¢ƒï¼Œوک¯و•´ن¸ھAUTOSARو¶و„è؟گè،Œçڑ„و،¥و¢پ,هگ„ن¸ھو¨،ه—SWCن¹‹é—´çڑ„é€ڑن؟،ن¸چوک¯ç›´وژ¥ن؛¤ن؛’çڑ„,而وک¯ç»ڈè؟‡è¯¥ه±‚ن½œن¸؛è؟گè،Œçڑ„هں؛ç،€ï¼ŒRTE里هŒ…هگ«ç€OSه¤§é‡ڈçڑ„è؟گè،Œç–ç•¥ه’Œوœچهٹ،م€‚RTEن¹ںوک¯VFB(Virtual Functional Bus)çڑ„ه®çژ°م€‚
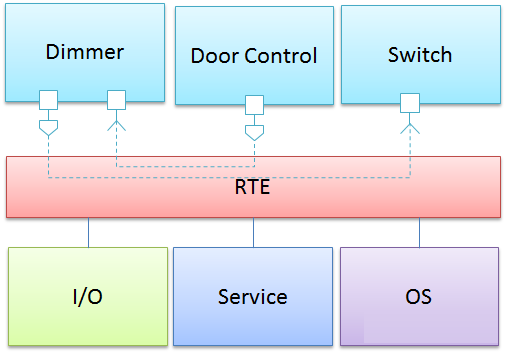
-
RTE需è¦پé…چç½®(e.g. وٹٹrunnablesه¯¹ه؛”هˆ°OSçڑ„tasksن¸هژ»)
-
é€ڑè؟‡RTEçڑ„ن؛‹ن»¶è§¦هڈ‘runnablesçڑ„è؟گè،Œ
-
ç”ںوˆگ调用runnablesçڑ„taskن»£ç پ
-
é…چç½®OSçڑ„ن¸€éƒ¨هˆ† (tasks, events, alarms)
-
ه®çژ°SWCن¹‹é—´çڑ„é€ڑن؟،
-
و¯ڈن¸ھECUçڑ„RTEه› SWCçڑ„需و±‚而ه¼‚
-
RTEوٹ½è±،ن؛†OS,éک²و¢SWCç›´وژ¥è®؟é—®OSه’ŒBSW
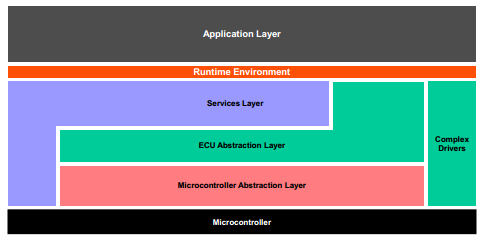
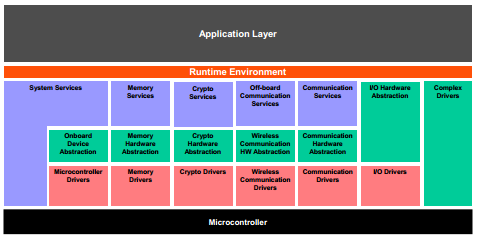
4 AUTOSARçڑ„هں؛ç،€è½¯ن»¶
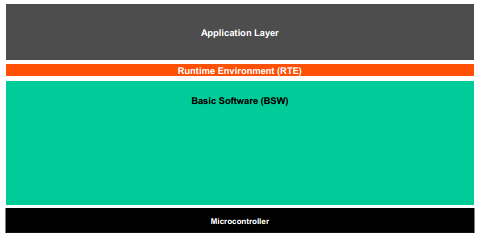
هں؛ç،€è½¯ن»¶ï¼Œهچ³BSWم€‚ن»ژAUTOSARو¶و„看,ن¸é—´ن¸€ه±‚,都وک¯BSWم€‚
细هŒ–هگژ
ه†چ细هŒ–
هڈ¯ن»¥çœ‹ه‡؛,ه…¶ه†…ه®¹éه¸¸ن¸°ه¯Œï¼Œن¸¥و ¼éپµه¾ھç€AUTOSARçڑ„هگ„é،¹و ‡ه‡†م€‚
BSWوٹ½è±،程ه؛¦و¯”较é«ک,هŒ…هگ«ç€è®¸ه¤ڑهں؛ç،€è½¯ن»¶م€‚
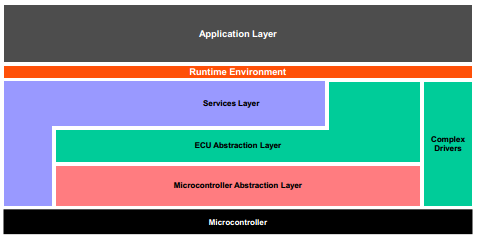
ن»ژه›¾ن¸ٹهڈ¯ن»¥çœ‹ه‡؛,ه…¶هˆ†ن؛†ه¾ˆه¤ڑ类,ه¯¹ه؛”ن¸چهگŒçڑ„هٹں能م€‚ن¾‹ه¦‚Memoryم€پCommunicationم€پSystemç‰ç‰م€‚
特هˆ«ن¸€وڈگçڑ„وک¯ï¼ŒComplex Driver,وک¯ه؛”ه¯¹و¯”较ه¤چو‚çڑ„驱هٹ¨çڑ„,è؟™ن¸ھهœ¨AUTOSARçڑ„و ‡ه‡†ن¸ٹوک¯و²،وœ‰ه¾ˆوکژç،®çڑ„ه®ڑن¹‰çڑ„,هڈ¯ç”±ç”¨وˆ·هژ»ه®çژ°م€‚
|