1 AUTOSARو¶و„و¦‚览
ن¹‹ه‰چو–‡ç« م€ٹ è€پو؟说é،¹ç›®è¦پن¸ٹAUTOSAR,وˆ‘و…Œه¾—ن¸€و‰¹ م€‹è®²è؟‡ï¼Œهœ¨و–°ن¸–ç؛ھ,و±½è½¦ن؛§ن¸ڑ蓬ه‹ƒهڈ‘ه±•ï¼Œو¬§و´²ه¤§é™†çڑ„车ن¼پن»¬ï¼Œç„ه‡†ن؛†è؟™وک¯ن¸€ه—ه¤§è›‹ç³•ï¼Œن؛ژوک¯هœ¨2002ه¹´وˆگç«‹ن؛†ن¸€ن¸ھèپ”ç›ں,وگن؛†ن¸ھهڈ«AUTOSARçڑ„و ‡ه‡†ï¼Œن»¥وœںن¸€ç»ںه¤©ن¸‹م€‚و¬،ه¹´ï¼Œن»–ن»¬ه°±ه¼€وگن؛†ï¼Œه¼€ه§‹هˆ¶ن½œè؟™ن¸ھAUTOSARçڑ„èچ‰ه›¾م€‚
è¯è¯´ï¼Œè؟™وک¯è¦په®ڑن¹‰ن¸€ه¥—و ‡ه‡†ï¼Œن¸€ن¸ھç»ںن¸€çڑ„و¶و„,那è؟™و¶و„وœ‰ن»€ن¹ˆه†…ه®¹ه‘¢ï¼ں
ن¸€ن½چه·¥ç¨‹ه¸ˆï¼Œه°†ه…¶وƒ³و³•ç”¨èچ‰ه›¾è،¨è¾¾ن؛†ه‡؛و¥
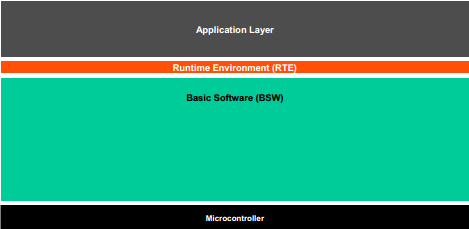
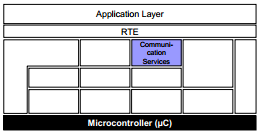
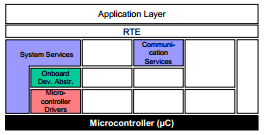
ه¹¶è§£é‡ٹ说,è؟™ن¸ھو¶و„ه¤§و¦‚هˆ†ن¸‰ه±‚,然هگژ看看هœ¨ه؛§çڑ„هگ„ن½چم€‚ن¼ڑè®®ن¸ٹçڑ„ه…¶ن»–ن؛؛é¢é¢ç›¸è§‘,都وƒ³è¯´ï¼Œè؟™ن¹ˆç®€é™‹ï¼Œèƒ½ç»ںن¸€و±ںو¹–ï¼ںè؟™ن½چه·¥ç¨‹ه¸ˆن¹ںن¸چçگ†ن¼ڑ,ن¸چو…Œن¸چه؟™ï¼Œç»§ç»ç”»ن¸‹هژ»ï¼ڑ
ه·¥ç¨‹ه¸ˆè§£é‡ٹ说,ه…³é”®هœ¨è؟™ن¸ھBSW,è؟کهڈ¯ن»¥هˆ†ن¸ھن¸‰ه››ه±‚ï¼ڑ
-
Service Layer ï¼ڑè؟™ن¸ھوک¯BSWçڑ„وœ€é«که±‚,وک¯ç»™Applicationè®؟问由Abstraction Layer覆盖çڑ„IOن؟،هڈ·ç‰م€‚
-
ECU Abstraction Layer ï¼ڑè؟™ن¸ھوک¯ç»™ه؛•ه±‚驱هٹ¨وڈگن¾›وٹ½è±،وژ¥هڈ£çڑ„م€‚
-
Microcontroler Abstraction Layer ï¼ڑè؟™ن¸ھوک¯هں؛ç،€è½¯ن»¶çڑ„وœ€ه؛•ه±‚,ه®ƒهŒ…هگ«وœ‰خ¼Cçڑ„驱هٹ¨ن»¥هڈٹه¤–ه›´çڑ„设ه¤‡é©±هٹ¨ç‰م€‚
è؟کوœ‰ï¼ŒApplicationه°±وک¯ه؛”用,è·ںه…¶ن»–و¶و„ه†™çڑ„ه؛”用类ن¼¼ï¼Œه°±ن¸چ用ه¤ڑ说ن؛†م€‚而è؟™ن¸ھRuntime Environment(RTE)ه‘¢ï¼ں
RTEوک¯ç»™ه؛”用وڈگن¾›é€ڑن؟،وœچهٹ،çڑ„,Applcationé€ڑè؟‡ه®ƒهڈ¯ن»¥è®؟é—®BSWçڑ„هٹں能,هپڑç»ںن¸€و ‡ه‡†çڑ„وژ¥هڈ£ï¼Œن»ژ而ه®çژ°éه¸¸و–¹ن¾؟çڑ„هڈ¯ç§»و¤چو€§ن؛†ï¼Œهگ„و¨،ه—ن¹ں独立ن؛†م€‚
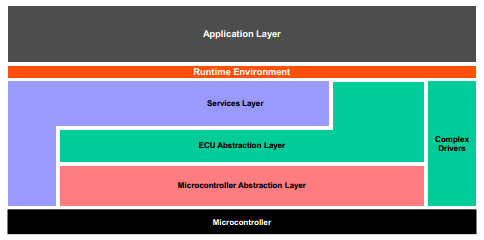
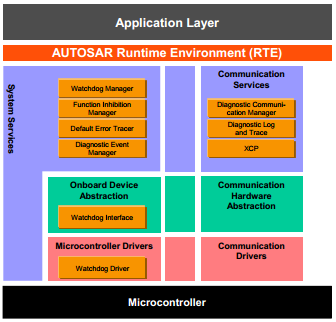
ه·¥ç¨‹ه¸ˆè¨€ç®€و„ڈ赅,و²،وœ‰هپڑو›´ه¤ڑçڑ„解é‡ٹ,然هگژه°±وƒ³ç»†هŒ–è؟™ن¸ھو¶و„ه›¾ï¼ڑ
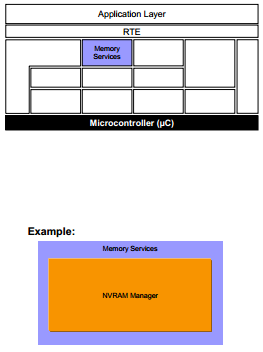
然هگژ,ن»–ه¾®ه¾®ç¬‘ن؛†ن¸‹ï¼ڑè؟™ه؛”该و¸…و™°ن؛†هگ§ï¼Œو¨ھç€çœ‹ç«–ç€çœ‹éƒ½ه¾ˆه¥½çگ†è§£م€‚و¯”ه¦‚说è؟™ن¸ھMemory Service,ه°±هڈ¯ن»¥è®©Applicationé€ڑè؟‡RTE调用,هپڑن؛†ه¾ˆه¤ڑو–¹و³•applicationè®؟é—®çڑ„وژ¥هڈ£ï¼Œه®ƒوک¯é€ڑè؟‡è°ƒç”¨Memory Hardware Abstractionو¥è®؟é—®Memory Driversçڑ„م€‚
é€ڑè؟‡è؟™ن¸‰ه±‚ه…³ç³»ه°±ه®çژ°ه¸‚é¢ن¸ٹه¤§éƒ¨هˆ†هٹں能需و±‚ن؛†م€‚ن½†وک¯ï¼Œو€»ن¼ڑوœ‰è؟™ه‡ ه±‚ه®çژ°ن¸چن؛†çڑ„هٹں能هگ§ï¼Œو€ژن¹ˆهٹï¼ںComplex Driversه°±هڈ¯ن»¥وڈگن¾›ç»™ç”¨وˆ·è‡ھه·±ه®ڑن¹‰ه•¦ï¼Œهڈ¯ن»¥هپڑن¸€ن؛›ه¤چو‚çڑ„驱هٹ¨م€‚
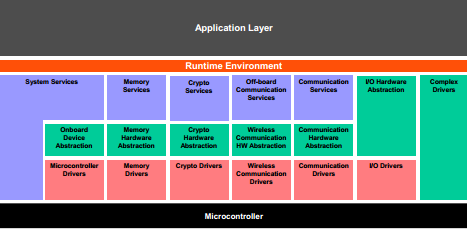
و€»çڑ„و¥è¯´ï¼Œهں؛ç،€è½¯ن»¶ï¼ˆBSW)هڈ¯ن»¥وŒ‰ن»¥ن¸‹ç±»ه‹هˆ†ï¼ڑ
-
Input/Output (I/O)
و ‡ه‡†هŒ–è®؟é—® sensors, actuators ن»¥هڈٹو؟ن¸ٹçڑ„ه¤–ه›´ه™¨ن»¶م€‚
-
Memory
و ‡ه‡†هŒ–è®؟é—®ه†…部وˆ–ه¤–部çڑ„Memory(NVM)م€‚
-
Crypto
و ‡ه‡†هŒ–è®؟é—®ه¯†ç پهژںè¯ï¼ŒهŒ…و‹¬ه†…部/ه¤–部ç،¬ن»¶هٹ é€ںه™¨
-
Communication
و ‡ه‡†هŒ–è®؟问车辆网络系ç»ں,ECU车载é€ڑن؟،ç³»ç»ںه’ŒECUه†…部软ن»¶
-
Off-board Communication
و ‡ه‡†هŒ–è®؟问车辆هˆ°Xçڑ„é€ڑن؟،,车辆و— ç؛؟网络系ç»ںن¸ï¼ŒECU车ه¤–é€ڑن؟،ç³»ç»ں
-
System
وڈگن¾›و ‡ه‡†هŒ–çڑ„(و“چن½œç³»ç»ں,è®،و—¶ه™¨ï¼Œé”™è¯¯هکه‚¨ه™¨ï¼‰ه’Œç‰¹ه®ڑن؛ژECUçڑ„(ECUçٹ¶و€پç®،çگ†ï¼Œçœ‹é—¨ç‹—ç®،çگ†ه™¨ï¼‰وœچهٹ،ه’Œه؛“هٹں能
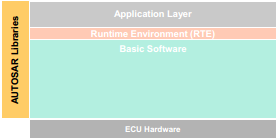
ç‰ç‰ï¼Œè؟کوœ‰ن¸ھن¸œè¥؟ه·®ç‚¹و¼ڈن؛†â€”— Library
è؟™ن¸ھLibraryه®é™…ن¸ٹوک¯ه¾ˆه¤ڑfunctionsçڑ„集هگˆï¼Œه®ƒهڈ¯ن»¥ï¼ڑ
-
ç”±BSWو¨،ه—(هŒ…و‹¬RTE),SW-C,ه؛“وˆ–集وˆگن»£ç پ调用
-
هœ¨هگŒن¸€ن؟وٹ¤çژ¯ه¢ƒن¸هœ¨è°ƒç”¨و–¹ن¸ٹن¸‹و–‡ن¸è؟گè،Œ
-
هڈھ能调用ه؛“
-
هڈ¯é‡چه…¥çڑ„
-
و²،وœ‰ه†…部çٹ¶و€پ
-
ن¸چ需è¦پن»»ن½•هˆه§‹هŒ–
-
وک¯هگŒو¥çڑ„,هچ³ه®ƒن»¬و²،وœ‰ç‰ه¾…点
2 AUTOSARçڑ„هں؛ç،€è½¯ن»¶
هں؛ç،€è½¯ن»¶ï¼Œهچ³BSWم€‚ه·¥ç¨‹ه¸ˆو‰“算详细讲解ن¸‹è؟™ن¸ھBSW,ه› ن¸؛ه®ƒéه¸¸é‡چè¦پم€‚
è¯è¯´ï¼Œه؛§ن¸ٹçڑ„ن¸ژن¼ڑه¤§ه’–هگ¬è؟™ن½چه·¥ç¨‹ه¸ˆè®²çڑ„و´¥و´¥وœ‰ه‘³ï¼Œè¶ٹو¥è¶ٹ觉ه¾—AUTOSARن¸€ç»ںو±ںو¹–وŒ‡و—¥هڈ¯ه¾…,ه¹¶وœںوœ›èƒ½è®¨è®؛و›´ه¤ڑ细èٹ‚م€‚
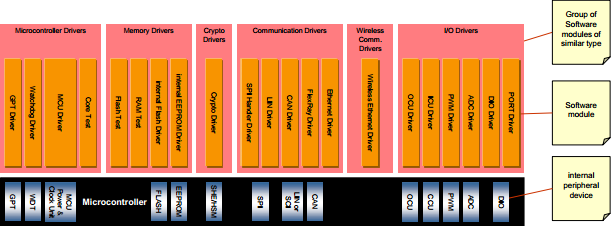
ه·¥ç¨‹ه¸ˆن¹ںه‡†ه¤‡ه¥½ن؛†è®¾è®،هژںç¨؟,ه¯¹è؟™ن؛›ç»†èٹ‚ه¨“ه¨“éپ“و¥م€‚ MCAL ن»ژه؛•ن¸‹ه¾€ن¸ٹ讲,第ن¸€ن¸ھMicrocontroler Abstraction Layer(هچ³MCAL),ه…¶وœ‰ن»¥ن¸‹و¨،ه—ï¼ڑ
-
Microcontroller Drivers
ه…·وœ‰ç›´وژ¥آµCè®؟é—®وƒé™گçڑ„ه†…部ه¤–ه›´è®¾ه¤‡ï¼ˆن¾‹ه¦‚看门狗,é€ڑ用ه®ڑو—¶ه™¨ï¼‰é©±هٹ¨ç¨‹ه؛ڈ(ن¾‹ه¦‚و ¸ه؟ƒوµ‹è¯•ï¼‰
-
Communication Drivers
车载ECU(ن¾‹ه¦‚SPI)ه’Œè½¦è¾†é€ڑن؟،(ن¾‹ه¦‚CAN)çڑ„驱هٹ¨ç¨‹ه؛ڈم€‚OSIه±‚ï¼ڑو•°وچ®é“¾è·¯ه±‚çڑ„ن¸€éƒ¨هˆ†م€‚
-
Memory Drivers
片ن¸ٹهکه‚¨è®¾ه¤‡ï¼ˆن¾‹ه¦‚ه†…部é—ھهک,ه†…部EEPROM)ه’Œهکه‚¨ه™¨وک ه°„çڑ„ه¤–部هکه‚¨è®¾ه¤‡ï¼ˆن¾‹ه¦‚ه¤–部é—ھهک)çڑ„驱هٹ¨ç¨‹ه؛ڈم€‚
-
I/O Drivers
用ن؛ژو¨،و‹ںه’Œو•°ه—I / Oçڑ„驱هٹ¨ه™¨ï¼ˆن¾‹ه¦‚ADC,PWM,DIO)م€‚
-
Crypto Drivers
用ن؛ژSHEوˆ–HSMç‰ç‰‡ن¸ٹهٹ ه¯†è®¾ه¤‡çڑ„驱هٹ¨ç¨‹ه؛ڈم€‚
-
Wireless Communication Drivers
用ن؛ژو— ç؛؟网络系ç»ںçڑ„驱هٹ¨ç¨‹ه؛ڈ(车载وˆ–车ه¤–é€ڑن؟،)م€‚
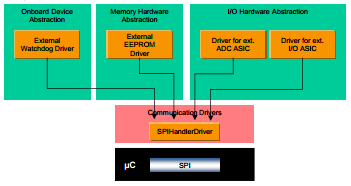
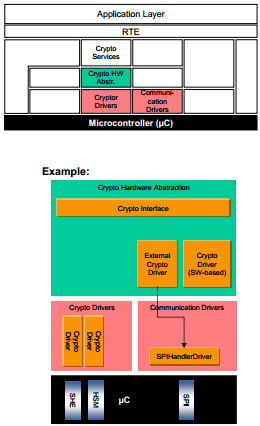
ن¸¾ن¾‹è¯´وکژ, SPIHandlerDriver وک¯ه…پ许ه¤ڑن¸ڑهٹ،ه¹¶هڈ‘è®؟问,ن¸؛ن؛†وٹ½è±،ه‡؛SPIçڑ„و‰€وœ‰هٹں能,è؟™ن؛›ه·²ç»ڈ用ن¸؛SPIهٹں能çڑ„IOوک¯ن¸چ能هپڑن»–用çڑ„م€‚
CDD
CDDهچ³Complex Driver,ن¸ٹو–‡ن¹ںوڈگهˆ°ن؛†ï¼Œه®ƒوک¯ç”¨و¥ه®çژ°BSW里é¢éو ‡ه‡†هŒ–هٹں能çڑ„م€‚ن¹ںه°±وک¯è¯´ï¼Œو ‡ه‡†هŒ–ه®ڑن¹‰ن»¥ه¤–çڑ„هٹں能هڈ¯ن»¥é€ڑè؟‡CDDو¥ه®çژ°ï¼Œه¦‚UART,MCALوک¯و²،وœ‰ه®ڑن¹‰UARTçڑ„و ‡ه‡†هŒ–çڑ„م€‚
(è؟™ن¸ھè¯é¢ک,هگژç»ه†چ详细讲解م€‚)
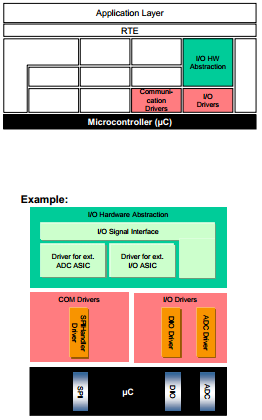
I/O Hardware Abstraction
I/O Hardware Abstractionوک¯ن¸€ç»„و¨،ه—,ن»ژه¤–ه›´I/O设ه¤‡ï¼ˆç‰‡ن¸ٹوˆ–و؟ن¸ٹ)çڑ„ن½چç½®ه’ŒECUç،¬ن»¶ه¸ƒه±€ï¼ˆن¾‹ه¦‚آµCه¼•è„ڑè؟وژ¥ه’Œن؟،هڈ·ç”µه¹³هڈچ转)ن¸وٹ½è±،ه‡؛و¥م€‚I/Oç،¬ن»¶وٹ½è±،ن¸چن¼ڑن»ژن¼ و„ںه™¨/و‰§è،Œه™¨ن¸وٹ½è±،ه‡؛و¥ï¼پ هڈ¯ن»¥é€ڑè؟‡I / Oن؟،هڈ·وژ¥هڈ£è®؟é—®ن¸چهگŒçڑ„I/ O设ه¤‡م€‚
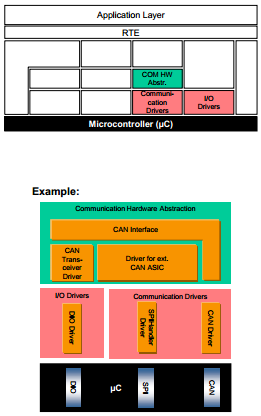
Communication Hardware Abstraction
Communication Hardware Abstraction وک¯ن¸€ç»„و¨،ه—,ن»ژé€ڑن؟،وژ§هˆ¶ه™¨çڑ„ن½چç½®ه’ŒECUç،¬ن»¶ه¸ƒه±€ن¸وٹ½è±،ه‡؛و¥م€‚ه¯¹ن؛ژو‰€وœ‰é€ڑن؟،ç³»ç»ں,都需è¦پ特ه®ڑçڑ„é€ڑن؟،ç،¬ن»¶وٹ½è±،(ن¾‹ه¦‚,ه¯¹ن؛ژLIN,CAN,FlexRay)م€‚
ن¾‹ه¦‚,ECUه…·وœ‰ه¸¦2ن¸ھه†…部CANé€ڑéپ“çڑ„ه¾®وژ§هˆ¶ه™¨ه’Œه¸¦4ن¸ھCANوژ§هˆ¶ه™¨çڑ„附هٹ و؟è½½ASICم€‚CAN-ASICé€ڑè؟‡SPIè؟وژ¥هˆ°ه¾®وژ§هˆ¶ه™¨م€‚
هڈ¯é€ڑè؟‡و€»ç؛؟特ه®ڑçڑ„وژ¥هڈ£ï¼ˆن¾‹ه¦‚CANوژ¥هڈ£ï¼‰è®؟é—®é€ڑن؟،驱هٹ¨ç¨‹ه؛ڈم€‚
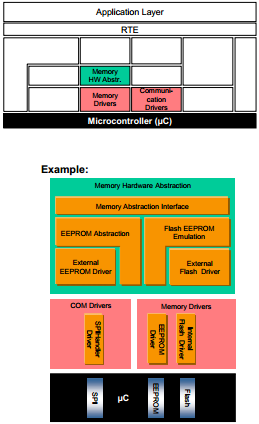
Memory Hardware Abstraction
Memory Hardware Abstraction وک¯ن¸€ç»„و¨،ه—,ن»ژه¤–ه›´هکه‚¨è®¾ه¤‡ï¼ˆç‰‡ن¸ٹوˆ–و؟载)çڑ„ن½چç½®ه’ŒECUç،¬ن»¶ه¸ƒه±€ن¸وٹ½è±،ه‡؛و¥م€‚
ن¾‹ه¦‚,هڈ¯ن»¥é€ڑè؟‡ç›¸هگŒçڑ„وœ؛هˆ¶è®؟问片ن¸ٹEEPROMه’Œه¤–部EEPROMه™¨ن»¶م€‚هڈ¯ن»¥é€ڑè؟‡ç‰¹ه®ڑن؛ژهکه‚¨ه™¨çڑ„وٹ½è±،/ن»؟çœںو¨،ه—(ن¾‹ه¦‚EEPROMوٹ½è±،)è®؟é—®هکه‚¨ه™¨é©±هٹ¨ç¨‹ه؛ڈم€‚é€ڑè؟‡هœ¨é—ھهکç،¬ن»¶هچ•ه…ƒé،¶éƒ¨و¨،و‹ںEEPROMوٹ½è±،,هڈ¯ن»¥é€ڑè؟‡هکه‚¨ه™¨وٹ½è±،وژ¥هڈ£ه¯¹ن¸¤ç§چç±»ه‹çڑ„ç،¬ن»¶è؟›è،Œé€ڑ用è®؟é—®م€‚
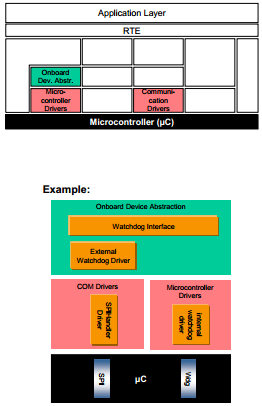
Onboard Device Abstraction
Onboard Device Abstraction هŒ…هگ«ç”¨ن؛ژECUو؟载设ه¤‡çڑ„驱هٹ¨ç¨‹ه؛ڈ,ن¸چ能ه°†ه…¶è§†ن¸؛ن¼ و„ںه™¨وˆ–و‰§è،Œه™¨ï¼Œن¾‹ه¦‚ه†…部وˆ–ه¤–部看门狗م€‚è؟™ن؛›é©±هٹ¨ç¨‹ه؛ڈé€ڑè؟‡آµCوٹ½è±،ه±‚è®؟é—®ECU车载设ه¤‡م€‚
Crypto Hardware Abstraction
Crypto Hardware Abstraction وک¯ن»ژهٹ ه¯†هں؛ه…ƒï¼ˆه†…部وˆ–ه¤–部ç،¬ن»¶وˆ–هں؛ن؛ژ软ن»¶ï¼‰çڑ„ن½چç½®وٹ½è±،çڑ„ن¸€ç»„و¨،ه—م€‚ ن¾‹ه¦‚, AESهژںè¯هœ¨SHEن¸ه®çژ°وˆ–ن½œن¸؛软ن»¶ه؛“وڈگن¾›م€‚
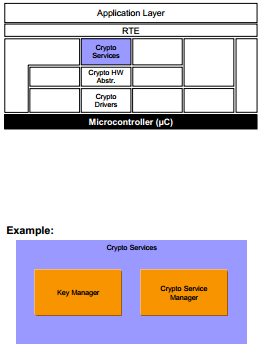
Crypto Services
Crypto ServicesهŒ…هگ«ن¸¤ن¸ھو¨،ه—ï¼ڑ
- هٹ ه¯†وœچهٹ،ç®،çگ†ه™¨è´ںè´£هٹ ه¯†ن½œن¸ڑçڑ„ç®،çگ†
- ه¯†é’¥ç®،çگ†ه™¨ن¸ژه¯†é’¥é¢„é…چç½®ن¸»وœ؛(هœ¨NVMوˆ–هٹ ه¯†é©±هٹ¨ç¨‹ه؛ڈن¸ï¼‰è؟›è،Œن؛¤ن؛’,ه¹¶ç®،çگ†è¯پن¹¦é“¾çڑ„هکه‚¨ه’ŒéھŒè¯پ
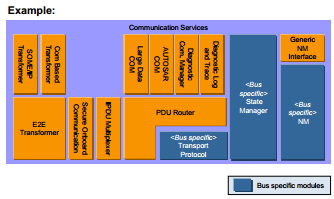
Communication Services Communication Servicesوک¯ن¸€ç»„用ن؛ژ车辆网络é€ڑن؟،(CAN,LIN,FlexRayه’Œن»¥ه¤ھ网)çڑ„و¨،ه—م€‚ه®ƒن»¬é€ڑè؟‡é€ڑن؟،ç،¬ن»¶وٹ½è±،ن¸ژé€ڑن؟،驱هٹ¨ç¨‹ه؛ڈوژ¥هڈ£م€‚
讲هˆ°è؟™é‡Œï¼Œن¼ڑن¸ٹçڑ„ه…¶ن»–ن؛؛هگ¬ç€هگ¬ç€وœ‰ن؛›و‡µé€¼ï¼Œè¶ٹ讲è¶ٹه¤چو‚ن؛†ï¼Œه·¥ç¨‹ه¸ˆهپœن؛†ن¸‹ï¼Œè¯´ï¼Œé€ڑن؟،وœچهٹ،è؟™éƒ¨هˆ†ï¼Œو¶‰هڈٹهˆ°CANم€پLINç”ڑ至TCP/IPç‰ï¼Œه†…ه®¹ه¾ˆه¤ڑن¹ںه¾ˆé‡چè¦پ,هگژç»وˆ‘ن»¬هڈ¦ه¤–هڈ¬ه¼€ن¼ڑ议讨è®؛هگ§م€‚
Memory Services
Memory Servicesç”±ن¸€ن¸ھو¨،ه—NVRAMç®،çگ†ه™¨ç»„وˆگم€‚ه®ƒè´ںè´£éوک“ه¤±و€§و•°وچ®çڑ„ç®،çگ†ï¼ˆن»ژن¸چهگŒçڑ„ه†…هک驱هٹ¨ه™¨è¯»هڈ–/ه†™ه…¥ï¼‰م€‚
ه®ƒن»¥ç»ںن¸€çڑ„و–¹ه¼ڈهگ‘ه؛”用程ه؛ڈوڈگن¾›éوک“ه¤±و€§و•°وچ®م€‚ه†…هکن½چç½®ه’Œه±و€§çڑ„و‘کè¦پم€‚وڈگن¾›éوک“ه¤±و€§و•°وچ®ç®،çگ†وœ؛هˆ¶ï¼Œن¾‹ه¦‚ن؟هک,هٹ 载,و ،éھŒه’Œ ن؟وٹ¤ه’ŒéھŒè¯پ,هڈ¯é çڑ„هکه‚¨ç‰م€‚
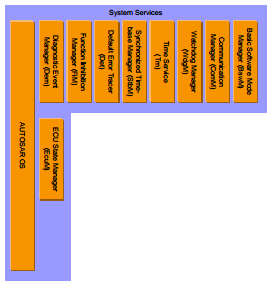
System Services
System Servicesوک¯ن¸€ç»„و¨،ه—ه’Œهٹں能,هڈ¯ç”±و‰€وœ‰ه±‚çڑ„و¨،ه—ن½؟用م€‚ç¤؛ن¾‹هŒ…و‹¬ه®و—¶و“چن½œç³»ç»ں(هŒ…و‹¬è®،و—¶ه™¨وœچهٹ،)ه’Œé”™è¯¯ç®،çگ†ه™¨م€‚
ه…¶ن¸ن¸€ن؛›وœچهٹ،وک¯ï¼ڑ
- هڈ–ه†³ن؛ژآµC(ن¾‹ه¦‚OS),ه¹¶ن¸”هڈ¯èƒ½و”¯وŒپ特و®ٹçڑ„آµCهٹں能(ن¾‹ه¦‚Time Service),
- 部هˆ†ن¾èµ–ECUç،¬ن»¶ه’Œه؛”用程ه؛ڈ(ن¾‹ه¦‚ECUM Management)وˆ–
- ç،¬ن»¶ه’ŒآµC独立م€‚
ه®ƒوڈگن¾›هں؛وœ¬çڑ„申请وœچهٹ،ن»¥هڈٹهں؛وœ¬è½¯ن»¶و¨،ه—م€‚
وœ‰ن¸“é—¨çڑ„و¨،ه—هڈ¯ç”¨ن؛ژAUTOSARن¸é”™è¯¯ه¤„çگ†çڑ„ن¸چهگŒو–¹é¢ï¼Œ ن¾‹ه¦‚ï¼ڑ
-
è¯ٹو–ن؛‹ن»¶ç®،çگ†ه™¨è´ںè´£ه¤„çگ†ه’Œهکه‚¨è¯ٹو–ن؛‹ن»¶ï¼ˆé”™è¯¯ï¼‰ه’Œç›¸ه…³çڑ„FreezeFrameو•°وچ®م€‚
-
è¯ٹو–و—¥ه؟—ه’Œè·ںè¸ھو¨،ه—و”¯وŒپه¯¹ه؛”用程ه؛ڈè؟›è،Œو—¥ه؟—è®°ه½•ه’Œè·ںè¸ھم€‚ه®ƒو”¶é›†ç”¨وˆ·ه®ڑن¹‰çڑ„و—¥ه؟—و¶ˆوپ¯ه¹¶ه°†ه…¶è½¬وچ¢ن¸؛و ‡ه‡†هŒ–و ¼ه¼ڈ
-
هں؛وœ¬è½¯ن»¶ن¸و£€وµ‹هˆ°çڑ„و‰€وœ‰ه¼€هڈ‘错误都وٹ¥ه‘ٹç»™é»ک认错误è·ںè¸ھ程ه؛ڈم€‚
-
Diagnostic Communication Managerوڈگن¾›ن؛†ç”¨ن؛ژè¯ٹو–وœچهٹ،çڑ„é€ڑ用API
-
ه…¶ن»–çڑ„,ç‰ç‰
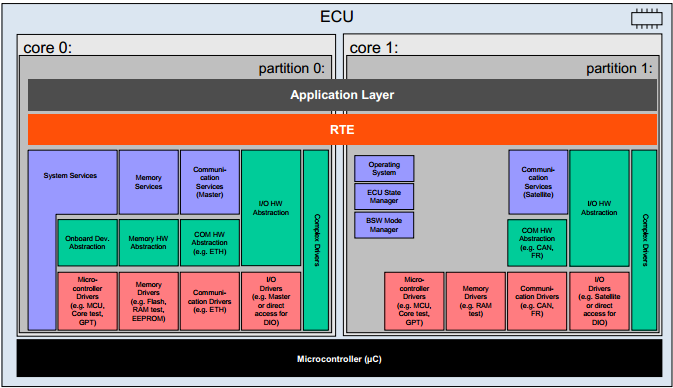
3 AUTOSARçڑ„ه¤ڑو ¸ه¤„çگ†
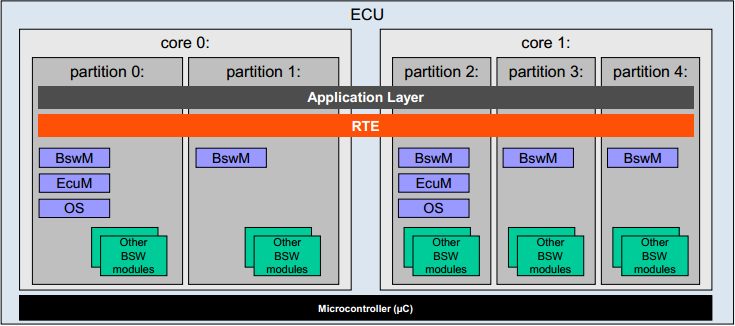
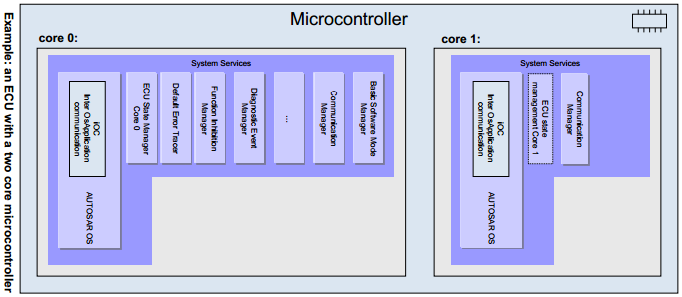
و¤هˆ»ï¼Œوœ‰ن؛؛وڈگ问,ه¸‚é¢ن¸ٹخ¼Cو›´و–°وچ¢ن»£éه¸¸ه؟«ï¼Œو€§èƒ½ن¹ںن¸چو–وڈگهچ‡ï¼Œç”ڑ至وœ‰ه¤ڑو ¸ه¤„çگ†ه™¨ï¼Œè؟™ن¸ھو¶و„ه¦‚ن½•ه؛”ه¯¹ه¤ڑو ¸ه¤„çگ†ï¼ں ه·¥ç¨‹ه¸ˆوƒ³ن؛†وƒ³ï¼Œshowه‡؛ن؛†ن¸‹ه›¾
ه¹¶ç»“هگˆن¸‹ه›¾ç»™ه‡؛解é‡ٹï¼ڑ
-
BSWو¨،ه—هڈ¯ن»¥هˆ†ه¸ƒهœ¨ه¤ڑن¸ھهˆ†هŒ؛ه’Œو ¸ه؟ƒن¸م€‚و‰€وœ‰هˆ†هŒ؛ه…±ن؛«ç›¸هگŒçڑ„ن»£ç پم€‚
-
و¯ڈن¸ھهˆ†هŒ؛ن¸ٹçڑ„و¨،ه—هڈ¯ن»¥ه®Œه…¨ç›¸هگŒï¼Œه¦‚ه›¾ن¸I/Oه †و ˆن¸çڑ„DIO驱هٹ¨ç¨‹ه؛ڈو‰€ç¤؛م€‚
-
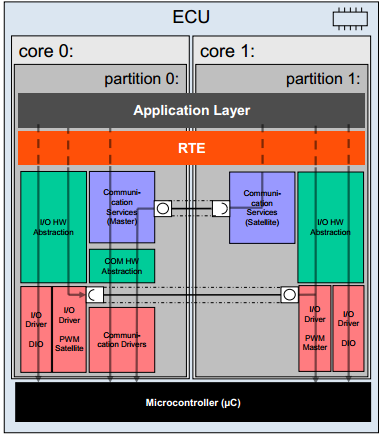
ن½œن¸؛و›؟ن»£ï¼Œن»–ن»¬هڈ¯ن»¥ن½؟用ن¾èµ–ن؛ژو ¸ه؟ƒçڑ„هˆ†و”¯و¥ه®çژ°ن¸چهگŒçڑ„è،Œن¸؛م€‚Comوœچهٹ،ه’ŒPWM驱هٹ¨ç¨‹ه؛ڈن½؟用هچ«وکںن¸»وœ؛é€ڑن؟،و¥ه¤„çگ†ن»ژ相ه؛”هچ«وکںهˆ°ن¸»وœ؛çڑ„ه‘¼هڈ«م€‚
-
ن¸»ç«™ن¸ژهچ«وکںن¹‹é—´çڑ„é€ڑن؟،ن¸چ规范م€‚ن¾‹ه¦‚,ه®ƒهڈ¯ن»¥هں؛ن؛ژBSWè°ƒه؛¦ç¨‹ه؛ڈوڈگن¾›çڑ„هٹں能,ن¹ںهڈ¯ن»¥هں؛ن؛ژه…±ن؛«ه†…هکم€‚
-
ç®ه¤´وŒ‡ç¤؛وœچهٹ،调用çڑ„ه¤„çگ†و¶‰هڈٹه“ھن؛›ç»„ن»¶ï¼Œè؟™هڈ–ه†³ن؛ژهˆ†هڈ‘و–¹و³•ه’Œè°ƒç”¨çڑ„و¥و؛گم€‚
- و¯ڈن¸ھè؟گè،ŒBSWو¨،ه—çڑ„هˆ†هŒ؛ن¸çڑ„هں؛وœ¬è½¯ن»¶و¨،ه¼ڈç®،çگ†ه™¨ï¼ˆBswM)
- و‰€وœ‰è؟™ن؛›هˆ†هŒ؛都وک¯هڈ—ن؟،ن»»çڑ„
- و¯ڈن¸ھه†…و ¸ن¸€ن¸ھEcuM(و¯ڈن¸ھهœ¨ن¸€ن¸ھهڈ—ن؟،ن»»çڑ„هˆ†هŒ؛ن¸ï¼‰
- é€ڑè؟‡ه¼•ه¯¼هٹ 载程ه؛ڈهگ¯هٹ¨çڑ„é‚£ن¸ھو ¸ه؟ƒن¸ٹçڑ„EcuMوک¯ن¸»EcuM
- ن¸»EcuMهگ¯هٹ¨و‰€وœ‰هچ«وکںEcuM
- ه¦‚ه›¾و‰€ç¤؛,IOCوڈگن¾›ن؛†é€ڑ讯وœچهٹ،,è؟™ن؛›ه®¢وˆ·ç«¯هڈ¯ن»¥è®؟问需è¦پè·¨هگŒن¸€ECUن¸ٹOS-Application边界è؟›è،Œé€ڑ讯çڑ„ه®¢وˆ·ç«¯م€‚IOCوک¯و“چن½œç³»ç»ںçڑ„ن¸€éƒ¨هˆ†م€‚
- BSWو¨،ه—هڈ¯ن»¥هœ¨ه¤ڑن¸ھه†…و ¸ن¸ٹو‰§è،Œï¼Œن¾‹ه¦‚ه›¾ن¸çڑ„ComMم€‚هœ¨è؟گè،Œو—¶ç،®ه®ڑè´ںè´£و‰§è،Œوœچهٹ،çڑ„و ¸ه؟ƒم€‚
- و¯ڈن¸ھو ¸ه؟ƒéƒ½è؟گè،Œن¸€ç§چECUçٹ¶و€پç®،çگ†
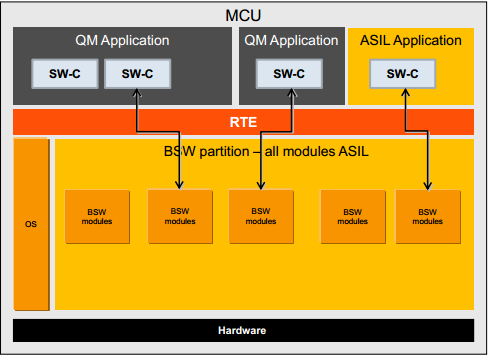
4 AUTOSARçڑ„Safetyهٹں能
é‚£ن¹ˆï¼Œه®‰ه…¨هٹں能ه¦‚ن½•ï¼ںه·¥ç¨‹ه¸ˆéƒ½وœ‰è€ƒè™‘ه’Œه‡†ه¤‡ï¼ڑ
AUTOSARوڈگن¾›ن؛†ن¸€ç§چçپµو´»çڑ„و–¹و³•و¥و”¯وŒپن¸ژه®‰ه…¨ç›¸ه…³çڑ„ECU,هڈ¯ن»¥ن½؟用ن¸¤ç§چو–¹و³•ï¼ڑ
- و‰€وœ‰BSWو¨،ه—ه‡و ¹وچ®و‰€éœ€çڑ„ASILه¼€هڈ‘
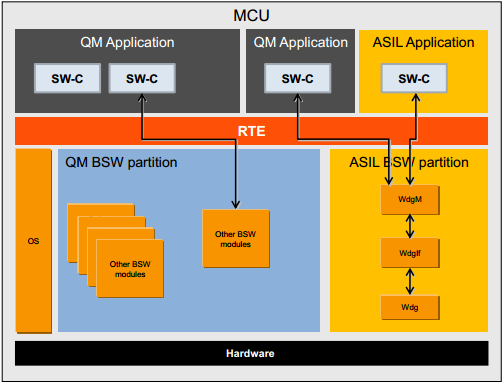
- و‰€é€‰و¨،ه—وک¯و ¹وچ®ASILه¼€هڈ‘çڑ„,ASILه’ŒéASILو¨،ه—هˆ†ن¸؛ن¸چهگŒçڑ„هˆ†هŒ؛(BSWهˆ†هڈ‘)
و³¨و„ڈï¼ڑ هˆ†هŒ؛هں؛ن؛ژOSApplications, O S -Applicationçڑ„TRUSTEDه±و€§ن¸ژASIL / non-ASILن¸چ相ه…³م€‚
ن½؟用ن¸چهگŒBSWهˆ†هŒ؛çڑ„ç¤؛ن¾‹ï¼Œ 看门狗ه †و ˆو”¾ç½®هœ¨è‡ھه·±çڑ„هˆ†هŒ؛ن¸
- ASILه’ŒéASIL SW-Cهڈ¯ن»¥é€ڑè؟‡RTEè®؟é—®WdgM
- BSWçڑ„ه…¶ن½™éƒ¨هˆ†و”¾هœ¨è‡ھه·±çڑ„هˆ†هŒ؛ن¸
ç»ڈè؟‡ن»¥ن¸ٹçڑ„解ç”ه’Œهˆ†è§£ï¼Œن¼ڑè®®ن¸ٹçڑ„هگ„ن½چ都点ه¤´è،¨ç¤؛هگŒو„ڈ,ن½†وک¯è؟کوک¯وœ‰ن؛؛وڈگن؛†ن¸ھé—®é¢ک,وˆ‘ن»¬ه®ڑن¹‰è؟™ن¹ˆه¤ڑهٹں能و¨،ه—,ن¸چن¸€ه®ڑو‰€وœ‰ن؛§ه“پ都ن¼ڑ用هˆ°ï¼Œه¦‚ن½•è£په‰ھï¼ں
5 AUTOSARçڑ„ICC
ه¥½ن؛†ï¼Œوˆ‘ن»¬وژ¥ن¸‹و¥è®¨è®؛ICC (Implementation Conformance Class)ï¼ڑ
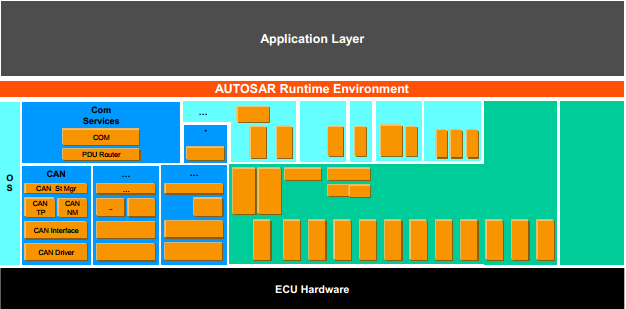
ن¸‹ه›¾وک¾ç¤؛ن؛†هں؛وœ¬è½¯ن»¶و¨،ه—هˆ°AUTOSARه±‚çڑ„وک ه°„
وˆ‘ن»¬ç§°è؟™ن¸ھن¸؛ICC3,那ICC2وک¯و€ژو ·çڑ„ï¼ں
è؟™ن¸ھن¾؟وک¯ICC2ن؛†م€‚
هˆ°ç›®ه‰چن¸؛و¢ï¼Œوœ¬و–‡و،£ن¸وک¾ç¤؛çڑ„集群وک¯è¯¥é،¹ç›®ه®ڑن¹‰çڑ„集群م€‚
ه½“ه‰چ,AUTOSARه¹¶وœھه°†ICC2ç؛§هˆ«ن¸ٹçڑ„群集é™گهˆ¶ن¸؛ن¸“用群集,ه› ن¸؛许ه¤ڑن¸چهگŒçڑ„ç؛¦وںه’Œن¼کهŒ–و ‡ه‡†هڈ¯èƒ½ن¼ڑه¯¼è‡´ن¸چهگŒçڑ„ICC2群集م€‚ هڈ¯èƒ½هکهœ¨ن¸چهگŒçڑ„AUTOSAR ICC2集群,هڈ¯ن»¥و ¹وچ®è¦په®ڑن¹‰çڑ„ICC2éپµن»ژو€§و–¹و³•ه£°وکژ符هگˆو€§م€‚
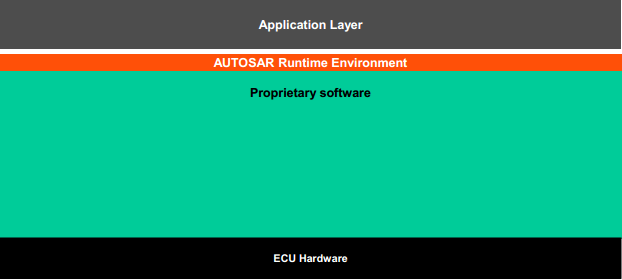
ICC1ه‘¢ï¼ں
هœ¨ç¬¦هگˆICC1çڑ„هں؛وœ¬è½¯ن»¶ن¸ï¼Œن¸چ需è¦پو¨،ه—وˆ–集群م€‚وœھوŒ‡ه®ڑو¤ن¸“وœ‰هں؛وœ¬è½¯ن»¶çڑ„ه†…部结و„م€‚
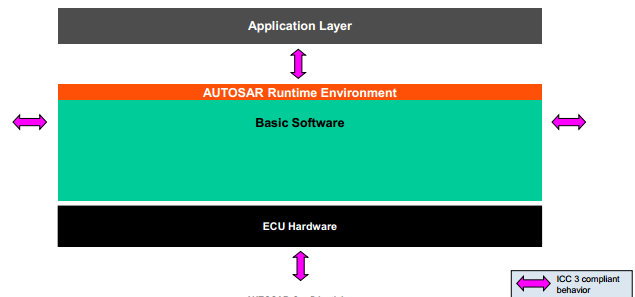
ç؛³ه°¼ï¼ںهڈˆه›هˆ°هژںو¥çڑ„ن¸‰ه±‚结و„ï¼ں
ه…¼ه®¹AUTOSAR(ICC1-3)çڑ„هں؛وœ¬è½¯ن»¶ï¼ˆهŒ…و‹¬RTE)ه؟…é،»ه…·وœ‰ICC3و¨،ه—规范وŒ‡ه®ڑçڑ„ه¤–部و€§èƒ½م€‚ ن¾‹ه¦‚,针ه¯¹ن»¥ن¸‹è،Œن¸؛ï¼ڑ
- و€»ç؛؟
- ه¼•ه¯¼هٹ 载程ه؛ڈه’Œ
- ه؛”用
هڈ¦ه¤–,ه…³ن؛ژICC3ن¸çڑ„ç³»ç»ںوڈڈè؟°ï¼ŒICC1 / 2é…چç½®ه؛”ه…¼ه®¹م€‚
ن¹ںوک¯è¯´ï¼Œè؟™ن¸ھو¶و„能ه±ˆèƒ½ن¼¸ï¼Œهڈھ需éپµه¾ھ相ه…³و ‡ه‡†è¦پو±‚هچ³هڈ¯ï¼Œéه¸¸çپµو´»م€‚
5 هگژè¯
ن¼ڑن¸ٹ ه“چèµ·ن؛†ç»ڈن¹…ن¸چç»çڑ„ وژŒه£°ï¼Œ 结و„ هپڑهˆ°è؟™ن»½ن¸ٹ, ن¹ںوک¯éه¸¸ 详ه°½ن؛†م€‚ ن½†وک¯ ,问é¢کè؟کوک¯وœ‰çڑ„, و¶و„ن¸ه®ڑن¹‰ن؛†é‚£ن¹ˆه¤ڑ و¨،ه—,و¨،ه—ن¹‹é—´çڑ„وژ¥هڈ£وک¯ه¦‚ن½•çڑ„ï¼ں ه·¥ç¨‹ه¸ˆï¼Œوƒ³ن؛†وƒ³ï¼Œé¢ه¯¹ه؛§ن¸ٹçڑ„وœں盼çڑ„ç›®ه…‰ï¼Œو…¢و‚ و‚ هœ°è¯´ï¼Œوˆ‘ن»¬ن¸‹و¬،ن¼ڑè®®ه†چ讨è®؛هگ§â€¦â€¦ï¼ˆه› ن¸؛è¦پن¸‹çڈن؛†ï¼Œن¸‡وپ¶èµ„وœ¬ن¸»ن¹‰çڑ„و¬§و´²ï¼Œن»–ن»¬çڑ„ه·¥ç¨‹ه¸ˆï¼Œن¸چï¼پهٹ ï¼پçڈï¼پï¼پ)
|