AUTOSARиҒ”зӣҹеңЁеҸ¬ејҖжһ¶жһ„и®Ёи®әдјҡдёҠпјҢе·ҘзЁӢеёҲи®Іи§ЈдәҶAUTOSARзҡ„еҹәжң¬жЎҶжһ¶(еҸҰи§ҒгҖҠ AUTOSARжһ¶жһ„зҡ„ж•…дәӢпјҲе№Іиҙ§пјү гҖӢ)пјҢеҗҢж—¶жҸҗеҮә Communication йғЁеҲҶеҸҰеӨ–и®Ёи®әгҖӮиҝҷж¬ЎиҝҷдҪҚе·ҘзЁӢеёҲеҮҶеӨҮдәҶдё°еҜҢзҡ„иө„ж–ҷе°ҶйҖҡдҝЎжңҚеҠЎиҜҰз»Ҷи®Іи§ЈдәҶдёҖз•ӘгҖӮ
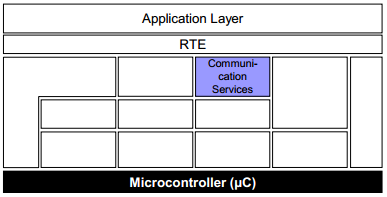
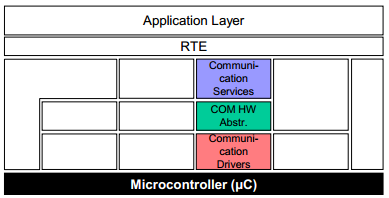
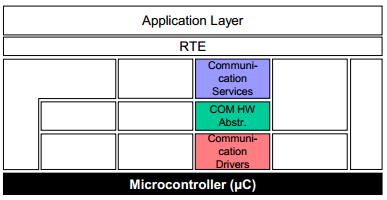
1 Communication Services вҖ“ General
Communication Service йҖҡдҝЎжңҚеҠЎжҳҜдёҖз»„з”ЁдәҺиҪҰиҫҶзҪ‘з»ңйҖҡдҝЎпјҲCANпјҢLINпјҢFlexRayе’Ңд»ҘеӨӘзҪ‘пјүзҡ„жЁЎеқ—гҖӮе®ғ们йҖҡиҝҮйҖҡдҝЎзЎ¬д»¶жҠҪиұЎдёҺйҖҡдҝЎй©ұеҠЁзЁӢеәҸжҺҘеҸЈгҖӮ
д»»еҠЎпјҡ дёәиҪҰиҫҶзҪ‘з»ңжҸҗдҫӣз»ҹдёҖзҡ„жҺҘеҸЈд»ҘиҝӣиЎҢйҖҡдҝЎгҖӮ жҸҗдҫӣз»ҹдёҖзҡ„зҪ‘з»ңз®ЎзҗҶжңҚеҠЎжҸҗдҫӣз»ҹдёҖзҡ„иҪҰиҫҶзҪ‘з»ңжҺҘеҸЈд»ҘиҝӣиЎҢиҜҠж–ӯйҖҡдҝЎ еңЁеә”з”ЁзЁӢеәҸдёӯйҡҗи—ҸеҚҸи®®е’Ңж¶ҲжҒҜеұһжҖ§гҖӮ зү№жҖ§пјҡ
- е®һзҺ°дәҶВөCе’ҢECU硬件зӢ¬з«ӢпјҢйғЁеҲҶеҸ–еҶідәҺжҖ»зәҝзұ»еһӢ
- дёҠеұӮжҺҘеҸЈдёҺВөCпјҢECU硬件е’ҢжҖ»зәҝзұ»еһӢж— е…ігҖӮ
- йҖҡдҝЎжңҚеҠЎе°ҶеңЁд»ҘдёӢйЎөйқўдёӯиҜҰз»Ҷд»Ӣз»ҚжҜҸдёӘзӣёе…ізҡ„иҪҰиҫҶзҪ‘з»ңзі»з»ҹгҖӮ
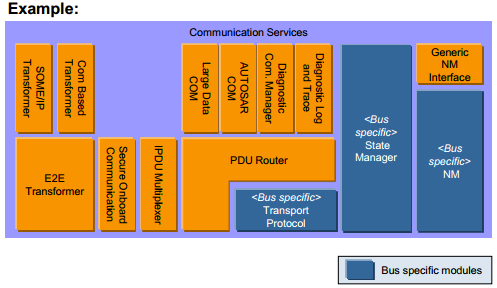
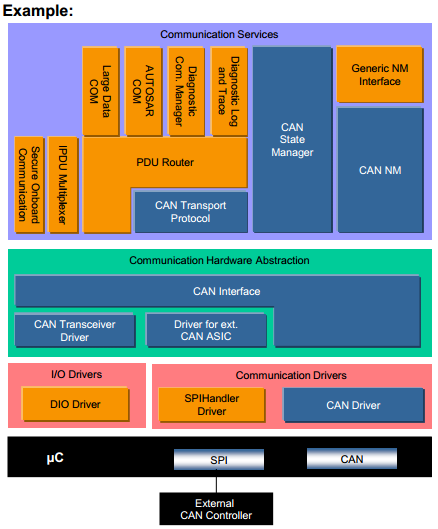
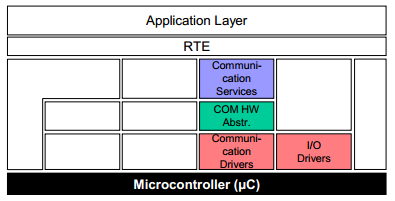
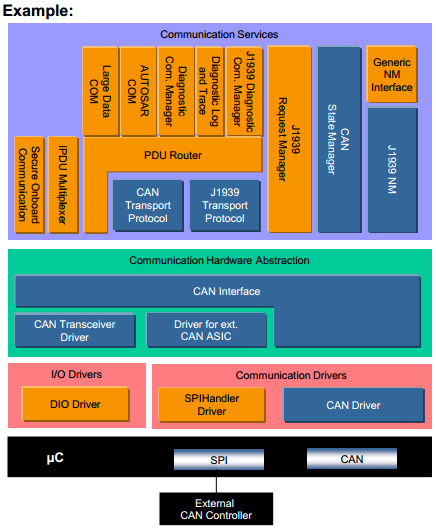
2 Communication Stack вҖ“ CAN
CANйҖҡдҝЎжңҚеҠЎ жҳҜдёҖз»„жЁЎеқ—пјҢз”ЁдәҺдёҺйҖҡдҝЎзі»з»ҹCANиҝӣиЎҢиҪҰиҫҶзҪ‘з»ңйҖҡдҝЎгҖӮ
е®ғжҸҗдҫӣдёҺCANзҪ‘з»ңзҡ„з»ҹдёҖжҺҘеҸЈгҖӮеңЁеә”з”ЁзЁӢеәҸдёӯйҡҗи—ҸеҚҸи®®е’Ңж¶ҲжҒҜеұһжҖ§гҖӮ CANйҖҡдҝЎж Ҳж”ҜжҢҒпјҢз»Ҹе…ёCANйҖҡи®ҜпјҲCAN 2.0пјүе’ҢCAN FDйҖҡдҝЎпјҲеҰӮжһң硬件ж”ҜжҢҒпјү
зү№жҖ§ пјҡ
- е®һзҺ°дәҶВөCе’ҢECU硬件зӢ¬з«ӢпјҢйғЁеҲҶеҸ–еҶідәҺCANгҖӮ
- AUTOSAR COMпјҢйҖҡз”ЁNMпјҲзҪ‘з»ңз®ЎзҗҶпјүжҺҘеҸЈе’ҢиҜҠж–ӯйҖҡдҝЎз®ЎзҗҶеҷЁеҜ№дәҺжүҖжңүиҪҰиҫҶзҪ‘з»ңзі»з»ҹйғҪжҳҜзӣёеҗҢзҡ„пјҢжҜҸдёӘECUдҪңдёәдёҖдёӘе®һдҫӢеӯҳеңЁгҖӮ
- йҖҡз”ЁNMжҺҘеҸЈд»…еҢ…еҗ«дёҖдёӘи°ғеәҰзЁӢеәҸпјҢ дёҚеҢ…жӢ¬е…¶д»–еҠҹиғҪгҖӮеҜ№дәҺзҪ‘е…іECUпјҢе®ғиҝҳеҸҜд»ҘеҢ…жӢ¬NMеҚҸи°ғеҷЁеҠҹиғҪпјҢиҜҘеҠҹиғҪе…Ғи®ёеҗҢжӯҘеӨҡдёӘпјҲзӣёеҗҢжҲ–дёҚеҗҢзұ»еһӢзҡ„пјүдёҚеҗҢзҪ‘з»ңд»ҘеҗҢжӯҘе”ӨйҶ’жҲ–е…ій—ӯе®ғ们гҖӮ
- CAN NMдё“з”ЁдәҺCANзҪ‘з»ңпјҢ并е°ҶеңЁжҜҸдёӘCANиҪҰиҫҶзҪ‘з»ңзі»з»ҹдёӯе®һдҫӢеҢ–гҖӮ
- зү№е®ҡдәҺйҖҡдҝЎзі»з»ҹзҡ„Can State ManagerеҸҜд»ҘеӨ„зҗҶдҫқиө–дәҺйҖҡдҝЎзі»з»ҹзҡ„еҗҜеҠЁе’Ңе…ій—ӯеҠҹиғҪгҖӮжӯӨеӨ–пјҢе®ғиҝҳжҺ§еҲ¶COMзҡ„дёҚеҗҢйҖүйЎ№пјҢд»ҘеҸ‘йҖҒPDU并зӣ‘и§ҶдҝЎеҸ·и¶…ж—¶гҖӮ
Communication Stack Extension вҖ“ TTCAN
зү№жҖ§пјҡ
-
TTCANжҳҜCANзҡ„з»қеҜ№и¶…йӣҶпјҢеҚіж”ҜжҢҒTTCANзҡ„CANж ҲеҸҜд»ҘеҗҢж—¶жңҚеҠЎдәҺCANе’ҢTTCANжҖ»зәҝгҖӮ
-
CanIfе’ҢCanDrvжҳҜд»…жңүзҡ„йңҖиҰҒжү©еұ•жүҚиғҪдёәTTCANйҖҡдҝЎжҸҗдҫӣжңҚеҠЎзҡ„жЁЎеқ—гҖӮ
-
еҜ№дәҺе…·жңүTTCANеҠҹиғҪзҡ„CANпјҢCommunication Stack CANзҡ„еұһжҖ§д№ҹйҖӮз”ЁгҖӮ
3 Communication Stack Extension вҖ“ J1939
J1939йҖҡдҝЎжңҚеҠЎ жү©еұ•дәҶжҷ®йҖҡзҡ„CANйҖҡдҝЎж ҲпјҢз”ЁдәҺйҮҚеһӢиҪҰиҫҶдёӯзҡ„иҪҰиҫҶзҪ‘з»ңйҖҡдҝЎгҖӮ
е®ғжҸҗдҫӣJ1939жүҖйңҖзҡ„еҚҸи®®жңҚеҠЎгҖӮеңЁдёҚйңҖиҰҒзҡ„ең°ж–№д»Һеә”з”ЁзЁӢеәҸйҡҗи—ҸеҚҸи®®е’Ңж¶ҲжҒҜеұһжҖ§гҖӮ жіЁж„ҸпјҢCANж ҲдёӯжңүдёӨдёӘдј иҫ“еҚҸи®®жЁЎеқ—пјҲCanTpе’ҢJ1939TpпјүпјҢеҸҜд»ҘеңЁдёҚеҗҢзҡ„йҖҡйҒ“дёҠдәӨжӣҝдҪҝз”ЁжҲ–并иЎҢдҪҝз”Ё е®ғ们зҡ„з”Ёжі•еҰӮдёӢпјҡ CanTpпјҡISOиҜҠж–ӯпјҲDCMпјүпјҢж ҮеҮҶCANжҖ»зәҝдёҠзҡ„еӨ§еһӢPDUдј иҫ“ J1939TpпјҡJ1939иҜҠж–ӯпјҢJ1939й©ұеҠЁзҡ„CANжҖ»зәҝдёҠзҡ„еӨ§еһӢPDUдј иҫ“
зү№жҖ§пјҡ
- е®һзҺ°дәҶеҹәдәҺCANпјҢзӢ¬з«ӢдәҺВөCе’ҢECU硬件гҖӮ
- AUTOSAR COMпјҢйҖҡз”ЁNMпјҲзҪ‘з»ңз®ЎзҗҶпјүжҺҘеҸЈе’ҢиҜҠж–ӯйҖҡдҝЎз®ЎзҗҶеҷЁеҜ№дәҺжүҖжңүиҪҰиҫҶзҪ‘з»ңзі»з»ҹйғҪжҳҜзӣёеҗҢзҡ„пјҢжҜҸдёӘECUдҪңдёәдёҖдёӘе®һдҫӢеӯҳеңЁгҖӮ
- ж”ҜжҢҒеңЁй…ҚзҪ®ж—¶жңӘзҹҘзҡ„еҠЁжҖҒеё§ж ҮиҜҶз¬ҰгҖӮ
- J1939зҪ‘з»ңз®ЎзҗҶеҸҜдёәжҜҸдёӘECUеҲҶй…Қе”ҜдёҖзҡ„ең°еқҖпјҢдҪҶдёҚж”ҜжҢҒзқЎзң /е”ӨйҶ’еӨ„зҗҶд»ҘеҸҠиҜёеҰӮйғЁеҲҶиҒ”зҪ‘д№Ӣзұ»зҡ„зӣёе…іжҰӮеҝөгҖӮ
- жҸҗдҫӣJ1939иҜҠж–ӯе’ҢиҜ·жұӮеӨ„зҗҶгҖӮ
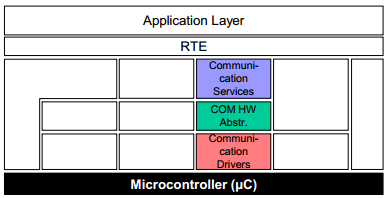
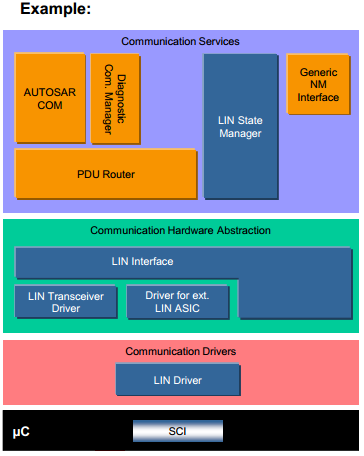
4 Communication Stack вҖ“ LIN
LINйҖҡдҝЎжңҚеҠЎ жҳҜз”ЁдәҺдёҺйҖҡдҝЎзі»з»ҹLINиҝӣиЎҢиҪҰиҫҶзҪ‘з»ңйҖҡдҝЎзҡ„дёҖз»„жЁЎеқ—гҖӮ
е®ғжҸҗдҫӣеҲ°LINзҪ‘з»ңзҡ„з»ҹдёҖжҺҘеҸЈгҖӮеңЁеә”з”ЁзЁӢеәҸдёӯйҡҗи—ҸеҚҸи®®е’Ңж¶ҲжҒҜеұһжҖ§гҖӮ
LINйҖҡдҝЎжңҚеҠЎеҢ…еҗ«:
- з¬ҰеҗҲISO 17987зҡ„йҖҡдҝЎж Ҳ
- и®ЎеҲ’иЎЁз®ЎзҗҶеҷЁпјҢз”ЁдәҺеӨ„зҗҶеҲҮжҚўеҲ°е…¶д»–и®ЎеҲ’иЎЁзҡ„иҜ·жұӮпјҲеҜ№дәҺLINдё»иҠӮзӮ№пјү
- дёҚеҗҢLINжЎҶжһ¶зұ»еһӢзҡ„йҖҡи®ҜеӨ„зҗҶ
- дј иҫ“еҚҸи®®пјҢз”ЁдәҺиҜҠж–ӯ
- е”ӨйҶ’е’ҢзқЎзң з•Ңйқў
- еҹәжң¬зҡ„LINй©ұеҠЁзЁӢеәҸпјҡ
- е®һж–ҪLINеҚҸ议并и®ҝй—®зү№е®ҡзҡ„硬件
- еҗҢж—¶ж”ҜжҢҒз®ҖеҚ•зҡ„UARTе’ҢеҹәдәҺеӨҚжқӮеё§зҡ„LIN硬件
жіЁж„Ҹе°ҶLINйӣҶжҲҗеҲ°AUTOSARдёӯзҡ„жғ…еҶөпјҡ
- LINжҺҘеҸЈжҺ§еҲ¶WakeUp / Sleep APIпјҢ并е…Ғи®ё Slaveз«Ҝ дҪҝжҖ»зәҝдҝқжҢҒе”ӨйҶ’зҠ¶жҖҒпјҲеҲҶж•ЈејҸж–№жі•пјүгҖӮ
- зү№е®ҡдәҺйҖҡдҝЎзі»з»ҹзҡ„LINзҠ¶жҖҒз®ЎзҗҶеҷЁеӨ„зҗҶдёҺйҖҡдҝЎзӣёе…ізҡ„еҗҜеҠЁе’Ңе…ій—ӯеҠҹиғҪгҖӮжӯӨеӨ–пјҢе®ғжҺ§еҲ¶жқҘиҮӘCommunication Managerзҡ„йҖҡдҝЎжЁЎејҸиҜ·жұӮгҖӮLINзҠ¶жҖҒз®ЎзҗҶеҷЁиҝҳйҖҡиҝҮиҝһжҺҘCOMжқҘжҺ§еҲ¶I-PDUз»„гҖӮ
- еҸ‘йҖҒLINеё§ж—¶пјҢLINжҺҘеҸЈеңЁйңҖиҰҒж•°жҚ®зҡ„ж—¶й—ҙзӮ№пјҲеҚіеңЁеҸ‘йҖҒLINеё§д№ӢеүҚпјүеҗ‘PDUи·Ҝз”ұеҷЁиҜ·жұӮеё§пјҲI-PDUпјүзҡ„ж•°жҚ®гҖӮ
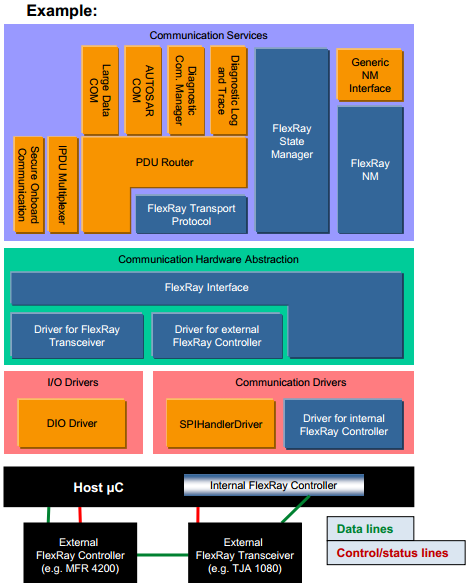
5 Communication Stack вҖ“ FlexRay
FlexRayйҖҡдҝЎжңҚеҠЎ жҳҜдёҖз»„жЁЎеқ—пјҢз”ЁдәҺдёҺйҖҡдҝЎзі»з»ҹFlexRayиҝӣиЎҢиҪҰиҫҶзҪ‘з»ңйҖҡдҝЎгҖӮ
е®ғжҸҗдҫӣдёҺFlexRayзҪ‘з»ңзҡ„з»ҹдёҖжҺҘеҸЈгҖӮеңЁеә”з”ЁзЁӢеәҸдёӯйҡҗи—ҸеҚҸи®®е’Ңж¶ҲжҒҜеұһжҖ§гҖӮ жіЁж„Ҹпјҡ
- FlexRayж ҲдёӯжңүдёӨдёӘдј иҫ“еҚҸи®®жЁЎеқ—пјҢеҸҜд»ҘдәӨжӣҝдҪҝз”Ё
- FrTpпјҡFlexRay ISOдј иҫ“еұӮ
- FrArTpпјҡFlexRay AUTOSARдј иҫ“еұӮпјҢжҸҗдҫӣдёҺAUTOSAR R3.xзҡ„жҖ»зәҝе…је®№жҖ§
зү№жҖ§пјҡ
- е®һж–ҪВөCе’ҢECU硬件зӢ¬з«ӢпјҢйғЁеҲҶеҸ–еҶідәҺFlexRayгҖӮ
- AUTOSAR COMпјҢйҖҡз”ЁNMжҺҘеҸЈе’ҢиҜҠж–ӯйҖҡдҝЎз®ЎзҗҶеҷЁеҜ№дәҺжүҖжңүиҪҰиҫҶзҪ‘з»ңзі»з»ҹйғҪжҳҜзӣёеҗҢзҡ„пјҢжҜҸдёӘECUдҪңдёәдёҖдёӘе®һдҫӢеӯҳеңЁгҖӮ
- йҖҡз”ЁNMжҺҘеҸЈд»…еҢ…еҗ«дёҖдёӘи°ғеәҰзЁӢеәҸгҖӮдёҚеҢ…жӢ¬е…¶д»–еҠҹиғҪгҖӮеҜ№дәҺзҪ‘е…іECUпјҢе°Ҷе…¶жӣҝжҚўдёәNMеҚҸи°ғеҷЁпјҢиҜҘеҚҸи°ғеҷЁиҝҳжҸҗдҫӣдәҶеҗҢжӯҘеӨҡдёӘдёҚеҗҢзҪ‘з»ңпјҲзӣёеҗҢжҲ–дёҚеҗҢзұ»еһӢпјүд»ҘеҗҢжӯҘе”ӨйҶ’жҲ–е…ій—ӯе®ғ们зҡ„еҠҹиғҪгҖӮ
- FlexRay NMдё“й—Ёз”ЁдәҺFlexRayзҪ‘з»ңпјҢ并еңЁFlexRayиҪҰиҪҪзҪ‘з»ңзі»з»ҹдёӯе®һдҫӢеҢ–гҖӮ
- зү№е®ҡдәҺйҖҡдҝЎзі»з»ҹзҡ„FlexRayзҠ¶жҖҒз®ЎзҗҶеҷЁеӨ„зҗҶдёҺйҖҡдҝЎзі»з»ҹжңүе…ізҡ„еҗҜеҠЁе’Ңе…ій—ӯеҠҹиғҪгҖӮжӯӨеӨ–пјҢе®ғиҝҳжҺ§еҲ¶COMзҡ„дёҚеҗҢйҖүйЎ№пјҢд»ҘеҸ‘йҖҒPDU并зӣ‘и§ҶдҝЎеҸ·и¶…ж—¶гҖӮ
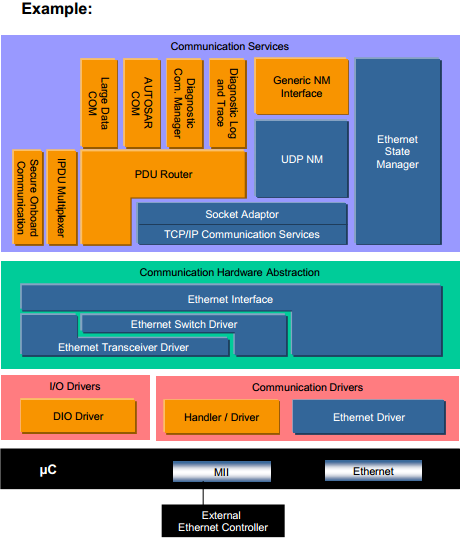
6 Communication Stack вҖ“ TCP/IP
TCP/IPйҖҡдҝЎжңҚеҠЎ жҳҜдёҖз»„жЁЎеқ—пјҢз”ЁдәҺдёҺйҖҡдҝЎзі»з»ҹTCP/IPиҝӣиЎҢиҪҰиҫҶзҪ‘з»ңйҖҡдҝЎгҖӮ
е®ғжҸҗдҫӣдёҖдёӘеҲ°TCP/IPзҪ‘з»ңзҡ„з»ҹдёҖжҺҘеҸЈгҖӮеңЁеә”з”ЁзЁӢеәҸдёӯйҡҗи—ҸеҚҸи®®е’Ңж¶ҲжҒҜеұһжҖ§гҖӮ
зү№жҖ§пјҡ
- TcpIpжЁЎеқ—е®һзҺ°TCP / IPеҚҸ议家ж—Ҹзҡ„дё»иҰҒеҚҸи®®пјҲTCPпјҢUDPпјҢIPv4пјҢIPv6пјҢARPпјҢICMPпјҢDHCPпјү并йҖҡиҝҮд»ҘеӨӘзҪ‘жҸҗдҫӣеҹәдәҺеҘ—жҺҘеӯ—зҡ„еҠЁжҖҒйҖҡдҝЎгҖӮ
- еҘ—жҺҘеӯ—йҖӮй…ҚеҷЁжЁЎеқ—пјҲSoAdпјүжҳҜTcpIpжЁЎеқ—зҡ„е”ҜдёҖдёҠеұӮжЁЎеқ—гҖӮ
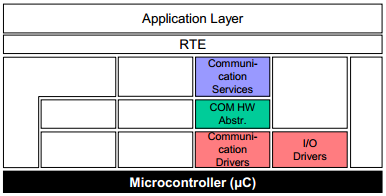
7 Communication Stack вҖ“ General
General Communication Stack еұһжҖ§пјҡ
- дҝЎеҸ·зҪ‘е…іжҳҜAUTOSAR COMзҡ„дёҖйғЁеҲҶпјҢз”ЁдәҺи·Ҝз”ұдҝЎеҸ·гҖӮ
- еҹәдәҺPDUзҡ„зҪ‘е…іжҳҜPDUи·Ҝз”ұеҷЁзҡ„дёҖйғЁеҲҶгҖӮ
- IPDUеӨҚз”ЁжҸҗдҫӣдәҶж·»еҠ дҝЎжҒҜзҡ„еҸҜиғҪжҖ§пјҢд»Ҙе®һзҺ°I-PDUзҡ„еӨҚз”ЁпјҲеҶ…е®№дёҚеҗҢпјҢдҪҶжҖ»зәҝдёҠзҡ„IDзӣёеҗҢпјүгҖӮ
- еӨҡI-PDUеҲ°е®№еҷЁзҡ„жҳ е°„жҸҗдҫӣдәҶе°ҶеӨҡдёӘI-PDUз»„еҗҲжҲҗдёҖдёӘиҫғеӨ§зҡ„пјҲе®№еҷЁпјүI-PDUзҡ„еҸҜиғҪжҖ§пјҢд»ҘдҫҝеңЁдёҖдёӘпјҲзү№е®ҡдәҺжҖ»зәҝзҡ„пјүеё§дёӯиҝӣиЎҢдј иҫ“гҖӮ
- дёҠеұӮжҺҘеҸЈпјҡВөCпјҢECU硬件е’ҢзҪ‘з»ңзұ»еһӢж— е…ігҖӮ
- жңүе…іGWдҪ“зі»з»“жһ„зҡ„з»ҶеҢ–пјҢиҜ·еҸӮйҳ…вҖңзӨәдҫӢйҖҡдҝЎвҖқ
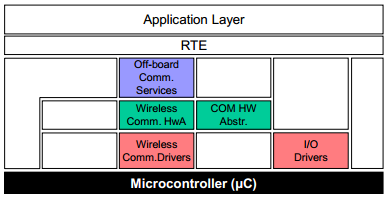
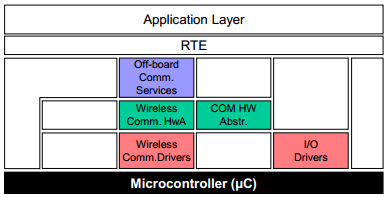
8 Off-board Communication Stack вҖ“ Vehicle-2-X
Off-board Communication Service жҳҜз”ЁдәҺйҖҡиҝҮиҮӘз»„з»Үж— зәҝзҪ‘з»ңиҝӣиЎҢ Vehicle-to-X йҖҡдҝЎзҡ„дёҖз»„жЁЎеқ—гҖӮ
- е®һзҺ°з”ЁдәҺжҺҘ收е’Ңдј иҫ“ж ҮеҮҶеҢ– V2X ж¶ҲжҒҜзҡ„еҠҹиғҪпјҢдёәзү№е®ҡдәҺиҪҰиҫҶзҡ„SW-Cе»әз«ӢжҺҘеҸЈ
- еҹәжң¬дј иҫ“еҚҸи®®=第4еұӮ
- ең°зҗҶзҪ‘з»ң=第3еұӮпјҲж №жҚ®ең°зҗҶеҢәеҹҹеҜ»еқҖпјҢзӣёеә”зҡ„д»ҘеӨӘзҪ‘её§е…·жңүиҮӘе·ұзҡ„д»ҘеӨӘзұ»еһӢпјү
- V2X з®ЎзҗҶпјҡз®ЎзҗҶи·ЁеұӮеҠҹиғҪпјҲдҫӢеҰӮеҠЁжҖҒжӢҘеЎһжҺ§еҲ¶пјҢе®үе…ЁжҖ§пјҢдҪҚзҪ®е’Ңж—¶й—ҙпјү
е®ғжҸҗдҫӣдёҺж— зәҝд»ҘеӨӘзҪ‘зҪ‘з»ңзҡ„з»ҹдёҖжҺҘеҸЈгҖӮеңЁеә”з”ЁзЁӢеәҸдёӯйҡҗи—ҸеҚҸи®®е’Ңж¶ҲжҒҜеұһжҖ§гҖӮ
жң¬ж–ҮеҸӮиҖғAUTOSARе®ҳж–№жһ¶жһ„ж–ҮжЎЈпјҢеӣҫзүҮд№ҹжқҘжәҗAUTOSARе®ҳж–№гҖӮ
|