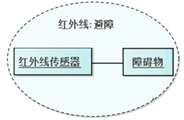
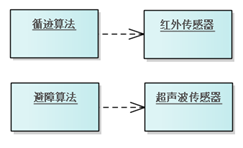
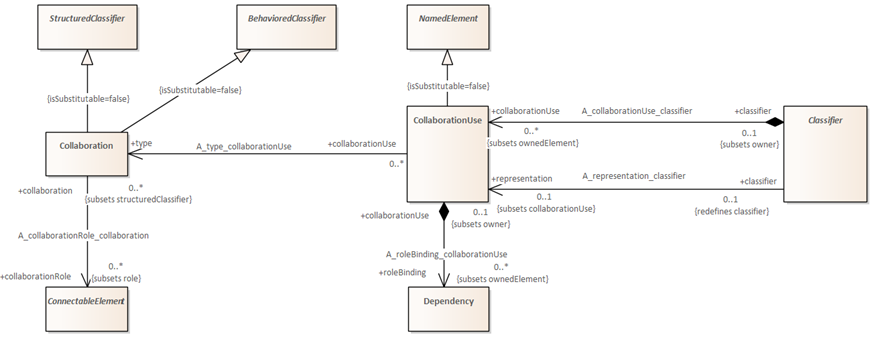
Collaboration Use (协作使用)在特定情境下使用协作模式的方式,将协作中的角色绑定到具体的分类器或实例。它是对协作的一种特定应用,用于解释一组元素之间的关系。 图例 协作使用 - 红外线避障,是避障协作的一种特定应用。它通过无人小车的红外线传感器进行探测障碍物。
Boundary
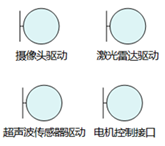
Boundary(边界) 是系统与外部参与者的交互接口(如 UI 、 API )。它用于对外部用户与系统之间的交互对象进行抽象,主要包括界面类,如对话框、窗口、菜单等。 图例是无人小车边界类。用来与物理世界交互并将模拟 / 数字信号与系统内部数据格式相互转换。
Control
Control (控制)是协调边界和实体之间交互的控制逻辑或业务规则。它用于体现应用程序的执行逻辑,提供相应的业务操作,将控制类抽象出来可以降低界面和数据库之间的耦合度。 图例是无人小车的避障控制核心包含的控制类。用来协调多个传感器和地图信息;执行核心避障算法;生成最终控制指令。其中融合多个边界对象传来的感知数据;查询实体对象(地图、状态)获取上下文;执行算法(如 VFF 、 DWA 、基于深度学习),计算安全路径和速度;发送指令给电机控制器。
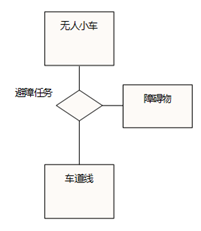
>N 元关联( N-Ary Association ) n 元关联元素用于对三个或更多个元素之间的复杂关系进行建模,通常在几个元素之间存在依赖关系的情况下使用,它通常和关联关系一起使用。如下是 N 元关联的外观和实例。 图例当小车执行“沿黑线前进并避开障碍”这个任务时,它需要任务调度器、 红外循迹模块、超声波传感器 和 运动控制器 几者共同参与,形成一个不可分割的协作整体。
关系
如下是根据《 UML2.5.1 建模规范》 编译的 UML 对象图的关系说明:
关系
图例
说明
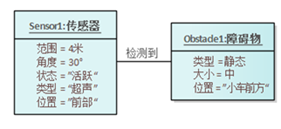
Associate
关联( Association )是分类器之间的一种关系,用来表示分类器的实例可以相互连接,也可以在逻辑上或物理上组合成某种聚合。
图例是传感器和障碍物之间的关联关系。