وڈڈè؟°ï¼ڑ وœ¬و•™ç¨‹ن»‹ç»چن؛†ROSç»´هں؛(wiki.ros.org)çڑ„组织结و„ن»¥هڈٹن½؟用و–¹و³•م€‚هگŒو—¶è®²è§£ن؛†ه¦‚ن½•و‰چ能ن»ژROSç»´هں؛ن¸و‰¾هˆ°ن½ 需è¦پçڑ„ن؟،وپ¯م€‚
ه…³é”®ه—ï¼ڑ wiki
و•™ç¨‹ç؛§هˆ«ï¼ڑ هˆه¦è€…
و³¨ï¼ڑوک¾ç„¶وœ¬و•™ç¨‹ه·²ç»ڈè؟‡و—¶ï¼ˆهŒ…و‹¬è‹±و–‡ç‰ˆçڑ„)م€‚
وœ¬و•™ç¨‹وˆ‘ن»¬ن¼ڑن»‹ç»چwikiن¸ٹهگ„ç§چن¸چهگŒçڑ„و ‡é¢کم€پ链وژ¥ه’Œن¾§è¾¹و ڈ,ن»ژ而ه¸®هٹ©ن½ çگ†è§£ wiki.ros.org
网é،µوک¯ه¦‚ن½•ه¸ƒه±€çڑ„م€‚
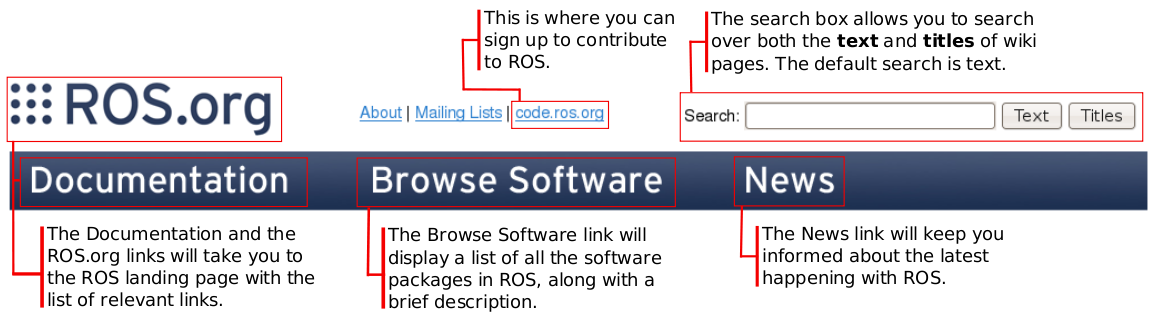
首é،µ
首é،µه°±وک¯ن½ هœ¨وµڈ览ه™¨ن¸و‰“ه¼€ wiki.ros.org هگژ看هˆ°çڑ„é،µé¢م€‚وˆ‘ن»¬و¥çœ‹ن¸€ن¸‹é¦–é،µé،¶éƒ¨çڑ„و ‡é¢کو ڈم€‚
packageé،µé¢
وˆ‘ن»¬و¥çœ‹ن¸€ن¸‹ros-pkgç»´هں؛é،µé¢ن¸çڑ„tf (www.ros.org/wiki/tf)é،µé¢م€‚و¯ڈن¸ھpackageçڑ„و ‡é¢کو ڈوک¯و ¹وچ®packageن¸çڑ„manifestو–‡ن»¶è‡ھهٹ¨ç”ںوˆگçڑ„م€‚و£ه¦‚ن½ 看هˆ°çڑ„,و¯ڈن¸ھpackageé،µé¢ن¸ٹ都هŒ…هگ«é’ˆه¯¹è¯¥packageçڑ„و•™ç¨‹هڈٹو•…éڑœوژ’除链وژ¥م€‚
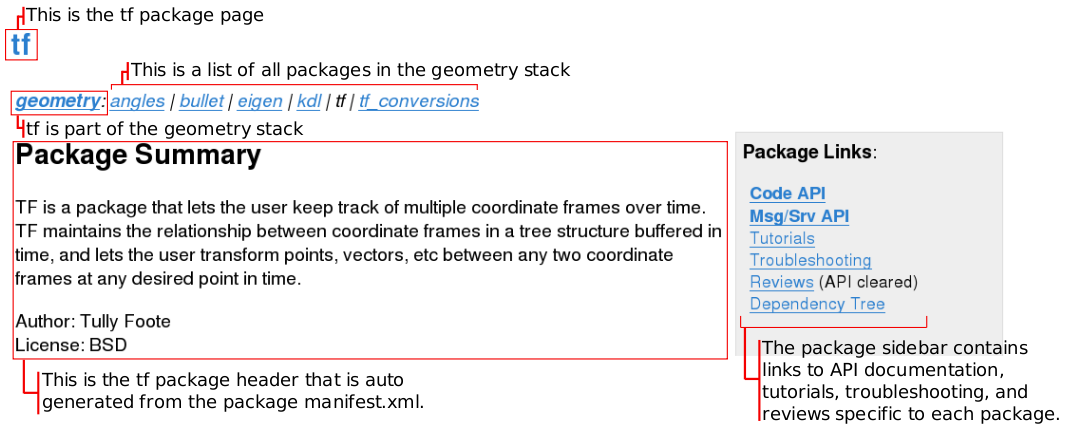
stacké،µé¢
وˆ‘ن»¬و¥çœ‹ن¸€ن¸‹ros stack ç»´هں؛é،µé¢ن¸ٹçڑ„ROS (www.ros.org/wiki/ROS)é،µé¢م€‚stackو ‡é¢کو ڈن¹ںوک¯و ¹وچ®stackن¸çڑ„manifestو–‡ن»¶è‡ھهٹ¨ç”ںوˆگçڑ„م€‚

ه¦‚و‚¨و‰€è§پ,و¯ڈن¸ھه †و ˆéƒ½هŒ…هگ«ç‰¹ه®ڑن؛ژه †و ˆçڑ„و•™ç¨‹ه’Œو•…éڑœوژ’除م€‚ |








