وٹ½è±،
该 REP ن¸؛هچ•ن½چه’Œهگو ‡ç؛¦ه®ڑوڈگن¾›ن؛†هڈ‚考 هœ¨ ROS ن¸ن½؟用م€‚
çگ†ç”±
هچ•ن½چه’Œç؛¦ه®ڑçڑ„ن¸چن¸€è‡´وک¯ ه¼€هڈ‘ن؛؛ه‘کçڑ„集وˆگé—®é¢ک,ن¹ںهڈ¯èƒ½ه¯¼è‡´è½¯ن»¶ 错误م€‚ç”±ن؛ژو•°وچ®ï¼Œه®ƒè؟کهڈ¯èƒ½ن؛§ç”ںن¸چه؟…è¦پçڑ„è®،ç®—
转وچ¢م€‚该 REP è®°ه½•ن؛† ROS çڑ„و ‡ه‡†ç؛¦ه®ڑ ن»¥ه‡ڈè½»è؟™ن؛›é—®é¢کم€‚
ه¼‚ه¸¸
و½œهœ¨çڑ„وœ؛ه™¨ن؛؛软ن»¶çڑ„范ه›´ه¤ھه¹؟ن؛†ï¼Œن¸چ能è¦پو±‚و‰€وœ‰ ROS 软ن»¶éپµه¾ھو¤ REP çڑ„ه‡†هˆ™م€‚ن½†وک¯ï¼Œé€‰و‹©ن¸چهگŒçڑ„
ه…¬ç؛¦ه؛”وœ‰ه……هˆ†çڑ„çگ†ç”±ه’Œه……هˆ†çڑ„و–‡ن»¶è®°ه½•م€‚
ن¾‹ه¦‚,وœ‰ن؛›هںںçڑ„é»ک认ç؛¦ه®ڑن¸چوک¯ 适ه½“م€‚وکںé™…é•؟ه؛¦çڑ„وµ‹é‡ڈن¸چوپ°ه½“ 米,而é¢هگ‘ç©؛é—´çڑ„ه›¾ن¹¦é¦†هڈ¯èƒ½ه¸Œوœ›é€‰و‹©ن¸چهگŒçڑ„
ه…¬ç؛¦م€‚ن¸چهگŒçڑ„هںںهڈ¯èƒ½ه¸Œوœ›وœ‰ه…¶ن»–ن¾‹ه¤–وƒ…ه†µ 解ه†³م€‚
هچ•ن½چ
وˆ‘ن»¬é€‰و‹©ه¯¹ SI هچ•ن½چè؟›è،Œو ‡ه‡†هŒ–م€‚è؟™ن؛›هچ•ن½چوک¯وœ€ه¤ڑçڑ„ ن¸€è‡´çڑ„ه›½é™…و ‡ه‡†م€‚SIهچ•ن½چç”±ن¸»ه¸ه›¢ç»´وٹ¤ International
des Poids et Mesures.[1] وœ‰ه¾ˆه¥½çڑ„و–‡و،£ هœ¨ç»´هں؛百科ن¸ٹن¸؛ه›½é™…هچ•ن½چهˆ¶ [2]
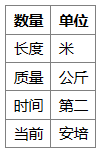
هں؛وœ¬هچ•ه…ƒ
è؟™ن؛›وک¯ه¸¸ç”¨çڑ„هں؛وœ¬هچ•ن½چ
و´¾ç”ںهچ•ن½چ
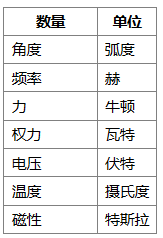
SI ه®ڑن¹‰ن؛†ن¸ƒن¸ھهں؛وœ¬هچ•ن½چه’Œè®¸ه¤ڑو´¾ç”ںهچ•ن½چم€‚ه¦‚وœو‚¨ن¸چن½؟用 SI هں؛وœ¬هچ•ن½چ,هˆ™ه؛”ن½؟用 SI و´¾ç”ںهچ•ن½چم€‚
هڈ¯ن»¥هœ¨ç»´هں؛百科ن¸ٹو‰¾هˆ°ه…³ن؛ژ SI و´¾ç”ںهچ•ن½چçڑ„良ه¥½و–‡و،£ [3]
ROS ن¸ه¸¸ç”¨çڑ„ SI و´¾ç”ںهچ•ن½چوœ‰ï¼ڑ
هگو ‡ç³»ç؛¦ه®ڑ
و‰€وœ‰هگو ‡ç³»éƒ½ه؛”éپµه¾ھè؟™ن؛›ç؛¦ه®ڑم€‚
و‰‹و€§
و‰€وœ‰ç³»ç»ں都وک¯هڈ³و’‡هگم€‚è؟™و„ڈه‘³ç€ه®ƒن»¬ç¬¦هگˆهڈ³و‰‹و³•هˆ™[4]م€‚
è½´و–¹هگ‘
ه°±è؛«ن½“而言,و ‡ه‡†وک¯ï¼ڑ
ه¯¹ن؛ژهœ°çگ†ن½چç½®çڑ„çں程笛هچ،ه°”è،¨ç¤؛,请ن½؟用ن¸œهŒ—هگ‘ن¸ٹ [5] (ENU) ç؛¦ه®ڑï¼ڑ
ن¸؛éپ؟ه…چ float32 ه€¼è¾ƒه¤§çڑ„ç²¾ه؛¦é—®é¢ک,ه»؛è®® 选و‹©é™„è؟‘çڑ„هژں点,ن¾‹ه¦‚ç³»ç»ںçڑ„èµ·ه§‹ن½چç½®م€‚
هگژç¼€ه¸§
ه¯¹ن؛ژ相وœ؛,é€ڑه¸¸وœ‰ç¬¬ن؛Œن¸ھه¸§ه®ڑن¹‰ “_opticalâ€هگژç¼€م€‚è؟™ن½؟用ن؛†ن¸€ن¸ھç•¥وœ‰ن¸چهگŒçڑ„ç؛¦ه®ڑï¼ڑ
ه¯¹ن؛ژه¸Œوœ›هœ¨ن¸œهŒ—هگ‘ن¸‹ [6] (NED) ç؛¦ه®ڑن¸‹ه·¥ن½œçڑ„ه®¤ه¤–ç³»ç»ں,ه®ڑن¹‰é€‚ه½“转وچ¢çڑ„ ه¸¦وœ‰â€œ_nedâ€هگژç¼€çڑ„è¾…هٹ©ه¸§ï¼ڑ
و—‹è½¬è،¨ç¤؛
وœ‰è®¸ه¤ڑو–¹و³•هڈ¯ن»¥è،¨ç¤؛و—‹è½¬م€‚ن¸‹é¢هˆ—ه‡؛ن؛†é¦–选é،؛ه؛ڈن»¥هڈٹهں؛وœ¬هژںçگ†م€‚
1.ه››ه…ƒو•°
- ç´§ه‡‘çڑ„è،¨ç¤؛ه½¢ه¼ڈ
- و²،وœ‰ه¥‡ç‚¹
2.و—‹è½¬çں©éکµ
3.ه›؛ه®ڑè½´هˆ†هˆ«ه›´ç»•Xم€پYم€پZè½´و¨ھو»ڑم€پن؟¯ن»°م€پهپڈèˆھ
- é،؛ه؛ڈو²،وœ‰و§ن¹‰
- 用ن؛ژ角é€ںه؛¦
4.و¬§و‹‰è§’هˆ†هˆ«ه›´ç»• Zم€پYم€پX è½´هپڈèˆھم€پن؟¯ن»°ه’Œو»ڑهٹ¨
- ç”±ن؛ژوœ‰ 24 ن¸ھ“وœ‰و•ˆâ€ï¼Œé€ڑه¸¸ن¸چ鼓هٹ±ن½؟用و¬§و‹‰è§’ ن¸چهگŒهںںçڑ„ç؛¦ه®ڑن½؟用ن¸چهگŒçڑ„ç؛¦ه®ڑè؟ç؛¦م€‚
و ¹وچ®هڈ³و‰‹ه®ڑهˆ™ï¼Œو–¹هگ‘çڑ„هپڈèˆھهˆ†é‡ڈéڑڈç€هگو،†و¶çڑ„ه¢هٹ 而ه¢هٹ 逆و—¶é’ˆو—‹è½¬ï¼Œه¯¹ن؛ژهœ°çگ†ه§؟هٹ؟,وŒ‡هگ‘ن¸œو–¹و—¶هپڈèˆھن¸؛零م€‚
è؟™éœ€è¦پ特هˆ«وڈگهڈٹ,ه› ن¸؛ه®ƒن¸ژن¼ ç»ںçڑ„ç½—ç›کè½´و‰؟ن¸چهگŒï¼Œ وŒ‡هگ‘هŒ—و–¹و—¶ن¸؛零,é،؛و—¶é’ˆé€’ه¢م€‚ç،¬ن»¶é©±هٹ¨ç¨‹ه؛ڈه؛”ن½؟
هœ¨هڈ‘ه¸ƒو ‡ه‡† ROS و¶ˆوپ¯ن¹‹ه‰چè؟›è،Œé€‚ه½“çڑ„转وچ¢م€‚
هچڈو–¹ه·®è،¨ç¤؛
ç؛؟و€§
float64[9] linear_acceleration_covariance # 3x3 row major matrix in x, y, z order
|
角
float64[9] angular_velocity_covariance # 3x3 row major matrix about x, y, z order with fixed axes
|
ه…ç»´
# Row-major representation of the 6x6 covariance matrix
# The orientation parameters use a fixed-axis representation.
# In order, the parameters are:
# (x, y, z, rotation about X axis, rotation about Y axis, rotation about Z axis)
float64[36] covariance
|
|








