Description: (و¦‚è؟°ï¼ڑ)وœ¬و•™ç¨‹ن»‹ç»چهœ¨ç¼–辑ros.orgç»´هں؛و—¶هڈ¯ن»¥ç”¨هˆ°çڑ„و¨،و؟ه’Œه®ڈه®ڑن¹‰ï¼Œه¹¶é™„وœ‰ç¤؛ن¾‹ن»¥ن¾›هڈ‚考م€‚
Keywords: teaching, tutorials, writing, و•™ç¨‹, 编辑,
ç»´هں؛, ه¦ن¹
Tutorial Level: BEGINNER
ه¦‚ن½•ه¼€ه§‹
هœ¨ه†™و•™ç¨‹ن¹‹ه‰چ,ه…ˆوµڈ览ن¸€ن¸‹و‚¨çڑ„و•™ç¨‹و‰€هœ¨é،µé¢م€‚ه¦‚وœè؟™ن¸ھé،µé¢و²،وœ‰è¢«هچ 用,那ن¹ˆو¤é،µé¢ه°±ن¼ڑوک¾ç¤؛ن¸؛“ن¸چهکهœ¨çڑ„ç»´هں؛â€é،µé¢ï¼ˆnon-existent
/Tutorials wiki page)م€‚
ن¸€و—¦و‚¨و‰“ه¼€è؟™ن¸ھ“ن¸چهکهœ¨çڑ„ç»´هں؛â€é،µé¢ï¼Œو‚¨ه°†ن¼ڑ被é‡چه®ڑهگ‘هˆ°ه¦‚ن¸‹ç•Œé¢ï¼ڑ
هچ•ه‡»â€œTutorialIndexTemplateâ€é“¾وژ¥ه¹¶ن؟هکé»ک认çڑ„预览و¨،و؟,و‚¨ه°±هڈ¯ن»¥هˆ›ه»؛ن¸€ن¸ھه¦‚ن¸‹çڑ„و–°é،µé¢ï¼ڑ
è؟™ن¸ھé،µé¢ه¯¹هˆ›ه»؛و‚¨çڑ„و•™ç¨‹éه¸¸وœ‰ç”¨ï¼ŒهگŒو—¶ن¹ںن¼ڑوک¾ç¤؛ن¸€ن¸ھه½“ه‰چو•™ç¨‹çڑ„هˆ—è،¨م€‚ هœ¨و ˆوˆ–هŒ…çڑ„ن»‹ç»چé،µé¢çڑ„è¾¹و ڈن¸ن¼ڑهˆ›ه»؛ن¸€ن¸ھه¦‚ن¸‹çڑ„و•™ç¨‹é“¾وژ¥ï¼ڑ
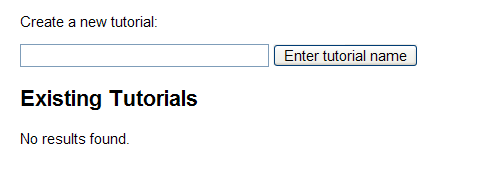
هˆ›ه»؛ن¸€ن¸ھو•™ç¨‹
هœ¨و–°ه»؛و•™ç¨‹و،†ï¼ˆCreate a new tutorial)ن¸è¾“ه…¥و‚¨و•™ç¨‹çڑ„هگچه—ه¹¶هچ•ه‡»â€œEnter
tutorial nameâ€وŒ‰é’®هˆ›ه»؛ن¸€ن¸ھهں؛ن؛ژTutorialTemplateçڑ„é،µé¢ï¼ˆن¸€ن؛›ه…³é”®ه—ه‰چن¼ڑوک¾ç¤؛
! 符هڈ·ï¼Œن½؟用و—¶è¯·هژ»وژ‰ه®ƒن»¬ï¼‰ï¼ڑ
####################################
##FILL ME IN
####################################
## for a custom note with links:
## !note =
## for the canned note of "This tutorial assumes that you have completed the
## previous tutorials:" just add the links
## !note.0.link=
## descriptive title for the tutorial
## !title =
## multi-line description to be displayed in search
## !description =
## the next tutorial description (optional)
## !next =
## links to next tutorial (optional)
## !next.0.link=
## !next.1.link=
## what level user is this tutorial for
## !level= (BeginnerCategory, IntermediateCategory, AdvancedCategory)
## !keywords =
####################################
!<<IncludeCSTemplate(TutorialCSHeaderTemplate)>>
|
请و³¨و„ڈن؟هکو‚¨çڑ„é،µé¢ï¼Œه› ن¸؛预览وŒ‰é’®ï¼ˆpreview)وœ‰ن؛‹ن¸چ能و£ه¸¸هœ°ه·¥ن½œم€‚
ه،«ه†™و¨،و؟ه¤´ن؟،وپ¯
ن¸ٹé¢ه±•ç¤؛çڑ„و¨،و؟وک¯ç³»ç»ںè‡ھهٹ¨ç”ںوˆگçڑ„و–‡و،£ه¤´ن؟،وپ¯م€‚و•ˆوœن¸ژوœ¬و•™ç¨‹çڑ„ه¼€ه¤´ç±»ن¼¼م€‚çژ°هœ¨وˆ‘ن»¬و¥ن¸€èµ·çœ‹çœ‹è؟™ن؛›و¨،و؟وک¯ه¦‚ن½•ه·¥ن½œçڑ„م€‚
01وڈگ醒
“وڈگç¤؛â€ï¼ˆnote)و ‡ç¾هڈ¯ن»¥ç”ںوˆگç±»ن¼¼ن؛ژé،µé¢é،¶éƒ¨çڑ„è“色وڈگ醒و،†ï¼Œن»¥ç”¨و¥وڈگç¤؛用وˆ·ه¦‚ن½•éپµه¾ھو‚¨çڑ„و•™ç¨‹م€‚
هگ‘ه…¶ن¸ه،«ه†™çڑ„ه†…ه®¹ه°†ن¼ڑç”ںوˆگه¦‚ن¸‹و•ˆوœï¼ڑ
note= ç‹‚و‹½ç‚«é…·هگٹ炸ه¤©م€‚
|
Note: ç‹‚و‹½ç‚«é…·هگٹ炸ه¤©م€‚
هڈˆه¦‚,و‚¨هڈ¯ن»¥ن½؟用ن¸‹هˆ—ه…³é”®ه—ï¼ڑ
note.0=[[ROS/Tutorials|ROSو•™ç¨‹]]
note.1=[[Documentation| ros.org]]
|
è؟™و ·ه°±هڈ¯ن»¥ن¸؛و‚¨çڑ„و•™ç¨‹و·»هٹ ن¸€ن¸ھو ‡ه‡†çڑ„ه‰چه¯¼و•™ç¨‹وڈگç¤؛ï¼ڑThis tutorial assumes
that you have completed the previous tutorials:(وœ¬و•™ç¨‹هپ‡è®¾و‚¨ه·²ç»ڈه®Œوˆگن¸”وژŒوڈ،ن؛†ن¸‹هˆ—و•™ç¨‹çڑ„ه†…ه®¹ï¼ڑ)
Note: This tutorial assumes that you have completed
the previous tutorials: ROSو•™ç¨‹, ros.org.
请و³¨و„ڈ,ه¦‚وœو‚¨وƒ³هœ¨و‚¨çڑ„è‡ھه®ڑن¹‰وڈگç¤؛ن¸هٹ ه…¥é“¾وژ¥ï¼Œو‚¨هڈ¯ن»¥ç›´وژ¥هœ¨noteو ‡ç¾ن¸هŒ…هگ«è؟™ن¸ھ链وژ¥è€Œن¸چوک¯هچ•ç‹¬ن½؟用
note.0, note.1ç‰و ‡ç¾هچ•ç‹¬و ‡è®°é“¾وژ¥م€‚ه¦‚وœو‚¨é”™è¯¯çڑ„ن½؟用ن؛†note.0, note.1ç‰و ‡ç¾ن»¥ن¸‹وڈگç¤؛ه†…ه®¹هڈ¯èƒ½ن¼ڑ错误çڑ„ه‡؛çژ°هœ¨و‚¨çڑ„链وژ¥ه‰چï¼ڑ"This
tutorial assumes that you have completed the previous
tutorials:"
02و ‡é¢ک
“و ‡é¢کâ€(title)و ‡ç¾هڈ¯ن»¥هˆ›ه»؛é،µé¢ه¼€ه¤´çڑ„و ‡é¢ک,هگŒو—¶ه®ƒن¹ںو ‡è®°ن؛†و‚¨و•™ç¨‹çڑ„و ‡é¢کم€‚و•™ç¨‹و ‡é¢که°†ه‡؛çژ°هœ¨وگœç´¢ç»“وœن¸م€‚
!title= é£ژéھڑن½†ن¸چه¤±çںœوŒپçڑ„هگچه—ه¾ˆé‡چè¦پ
|
03و¦‚è؟°
“و¦‚è؟°â€ï¼ˆdescription)و ‡ç¾ن¼ڑهœ¨و‚¨çڑ„é،µé¢é،¶ç«¯وک¾ç¤؛و‚¨çڑ„و•™ç¨‹و¦‚è؟°ï¼Œو¤و¦‚è؟°ن¹ںن¼ڑه‡؛çژ°هœ¨وگœç´¢ç»“وœن¸م€‚
description= وˆ‘çڑ„葵èٹ±ه®ه…¸ç‹‚و‹½ç‚«é…·هگٹ炸ه¤©ï¼Œè؟کن¸چه؟«و¥è¯•è¯•!
|
description= وˆ‘çڑ„葵èٹ±ه®ه…¸ç‹‚و‹½ç‚«é…·هگٹ炸ه¤©ï¼Œè؟کن¸چه؟«و¥è¯•è¯•!
و•ˆوœه¦‚ن¸‹ï¼ڑ
Description: وˆ‘çڑ„葵èٹ±ه®ه…¸ç‹‚و‹½ç‚«é…·هگٹ炸ه¤©ï¼Œè؟کن¸چه؟«و¥è¯•è¯•!
04هگژç»
“هگژç»â€ï¼ˆnext)و ‡ç¾ç”¨ن؛ژوک¾ç¤؛ه®Œوˆگو‚¨ه½“ه‰چو•™ç¨‹ن¹‹هگژهڈ¯ن»¥ç»§ç»ه¦ن¹ çڑ„ه…¶ن»–و•™ç¨‹م€‚è؟™ن¸ھو ‡ç¾وک¯هڈ¯é€‰çڑ„,ه¦‚وœç©؛ن¸‹ه°†ن¸چن¼ڑوک¾ç¤؛ن»»ن½•ه†…ه®¹م€‚
next=练ه®Œè‘µèٹ±ه®ه…¸çڑ„ن؛²ن»¬è؟کهڈ¯ن»¥çœ‹çœ‹
next.0.link=[[ROS/Tutorials|ROSو•™ç¨‹]]
next.1.link=[[actionlib_tutorials/Tutorials|actionlibو•™ç¨‹]]
|
و•ˆوœه¦‚ن¸‹ï¼ڑ
Next Tutorial: 练ه®Œè‘µèٹ±ه®ه…¸çڑ„ن؛²ن»¬è؟کهڈ¯ن»¥çœ‹çœ‹ROSو•™ç¨‹ actionlibو•™ç¨‹.
و‚¨ن¹ںهڈ¯ن»¥è؟™و ·ن½؟用ï¼ڑ
next.0.link=[[actionlib_tutorials/Tutorials|Actionlibو•™ç¨‹]]
|
و•ˆوœه¦‚ن¸‹ï¼ڑ
Next Tutorial: Actionlibو•™ç¨‹.
05ç‰ç؛§
“ç‰ç؛§â€ï¼ˆlevel)و ‡ç¾وœ‰هڈŒé‡چو„ڈن¹‰,ه®ƒن¸چن½†ه‘ٹ诉用وˆ·و‚¨çڑ„و•™ç¨‹éœ€è¦پن»–ن»¬è¾¾هˆ°ن»€ن¹ˆو°´ه¹³ï¼Œè€Œن¸”ن¹ںوک¯و•™ç¨‹وگœç´¢ه¼•و“ژçڑ„هˆ†ç±»و ‡ه‡†ن¹‹ن¸€م€‚
BeginnerCategoryï¼ڑهˆç؛§ IntermediateCategoryï¼ڑن¸ç؛§ AdvancedCategoryï¼ڑé«کç؛§
و•ˆوœه¦‚ن¸‹ï¼ڑ
Tutorial Level: ADVANCED
06ه…³é”®ه—
“ه…³é”®ه—â€ï¼ˆkeywords)و ‡ç¾هڈ¯ن»¥ه¸®هٹ©ç”¨وˆ·é€ڑè؟‡ه…³é”®ه—و‰¾هˆ°و‚¨çڑ„و•™ç¨‹م€‚
keywords= ç‹‚و‹½, ç‚«é…·, هگٹ炸ه¤©
|
و•ˆوœه¦‚ن¸‹ï¼ڑ
Keywords: ç‹‚و‹½, ç‚«é…·, هگٹ炸ه¤©
ه®ç”¨ه®ڈه‘½ن»¤
ROSç»´هں؛وڈگن¾›ن؛†è®¸ه¤ڑوœ‰ç”¨çڑ„ه®ڈه‘½ن»¤ن»¥ه¸®هٹ©و‚¨و›´ه¥½çڑ„ه®Œوˆگو‚¨çڑ„و•™ç¨‹م€‚
01ن»£ç پوک¾ç¤؛و،†
ç›®ه‰چROSç»´هں؛و”¯وŒپن»¥ن¸‹è¯è¨€çڑ„ن»£ç پوڈگç¤؛و،†ï¼ڑ
c++
ç¤؛ن¾‹:
{{{
#!cplusplus
#include <ros/ros.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
...
}}}
|
وک¾ç¤؛و•ˆوœ:
1 #include <ros/ros.h>
2 int main(int argc, char** argv)
3 {
4 ros::init(argc, argv, "talker");
5 ros::NodeHandle n;
6 ...
|
latex
ç¤؛ن¾‹:
{{{
#!latex
$$\overline{\overline{J}} \dot{\overline{v}} = -\overline{k}$$
}}}
|
وک¾ç¤؛و•ˆوœ:
latex error! exitcode was 2 (signal 0), transscript follows:
[Wed Nov 29 06:16:36.189210 2023] [:error] [pid 17000] failed to exec() latex
|
python
ç¤؛ن¾‹:
{{{
#!python
#!/usr/bin/env python
import roslib; roslib.load_manifest('beginner_tutorials')
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('chatter', String)
rospy.init_node('talker', anonymous=True)
...
}}}
|
وک¾ç¤؛و•ˆوœ:
1
2 import roslib; roslib.load_manifest('beginner_tutorials')
3 import rospy
4 from std_msgs.msg import String
5 def talker():
6 pub = rospy.Publisher('chatter', String)
7 rospy.init_node('talker', anonymous=True)
8 ...
|
02
CodeRef
هœ¨و‚¨ç¼–ه†™و•™ç¨‹çڑ„è؟‡ç¨‹ن¸ï¼Œو‚¨وœ‰و—¶هڈ¯èƒ½ن¼ڑه¼•ç”¨هˆ°و‚¨ن¹‹ه‰چو‰€ه†™çڑ„ن»£ç په—م€‚è؟™و—¶ï¼Œو‚¨هڈ¯ن»¥ن½؟用“CodeRefâ€ه¼•ç”¨ه®ƒن»¬م€‚
{{{
#!cplusplus block=blockname
葵èٹ±ه®ه…¸....
ن¸چن½† é«ک端ه¤§و°”ن¸ٹو،£و¬،
而ن¸” ç‹‚و‹½ç‚«é…·هگٹ炸ه¤©
}}}
|
ن½ هڈ¯ن»¥ن½؟用“CodeRefâ€ه®ڈو¥ه¼•ç”¨ن¸ٹé¢ن»£ç په—çڑ„特ه®ڑè،Œï¼ڑ
<<CodeRef(blockname,1,2)>>
|
و•ˆوœه¦‚ن¸‹ï¼ڑ
1 葵èٹ±ه®ه…¸....
2 ن¸چن½† é«ک端ه¤§و°”ن¸ٹو،£و¬،
|
03FullSearchWithDescriptionsCS
“FullSearchWithDescriptionsCSâ€ه®ڈهڈ¯ن»¥و ¹وچ®ه…³é”®ه—è‡ھهٹ¨ç”ںوˆگو•™ç¨‹ç´¢ه¼•ه’Œوگœç´¢ç»“وœم€‚
<<FullSearchWithDescriptionsCS(title:WritingTutorials BeginnerCategory)>>
|
è؟™و،ن»£ç پ用و¥وک¾ç¤؛و ‡é¢کن¸؛“WritingTutorialsâ€ن¸”هˆ†ç±»ن¸؛“BeginnerCategoryâ€çڑ„و•™ç¨‹çڑ„و ‡é¢کهڈٹو¦‚è؟°م€‚ه¦‚وœه°†هˆ†ç±»و”¹ن¸؛“AdvancedCategoryâ€ï¼Œه°†و²،وœ‰ن»»ن½•وک¾ç¤؛结وœم€‚
1. How to Write a Tutorial
This tutorial covers useful template
and macros for writing tutorials, along with example
tutorials that are available for guidance on ros.org
2. Como escrever um tutorial
This tutorial covers useful template and macros
for writing tutorials, along with example tutorials
that are available for guidance on ros.org
3. ه¦‚ن½•ç¼–ه†™و•™ç¨‹
(و¦‚è؟°ï¼ڑ)وœ¬و•™ç¨‹ن»‹ç»چهœ¨ç¼–辑ros.orgç»´هں؛و—¶هڈ¯ن»¥ç”¨هˆ°çڑ„و¨،و؟ه’Œه®ڈه®ڑن¹‰ï¼Œه¹¶é™„وœ‰ç¤؛ن¾‹ن»¥ن¾›هڈ‚考م€‚
4. مƒپمƒ¥مƒ¼مƒˆمƒھم‚¢مƒ«مپ®و›¸مپچو–¹
مپ“مپ®مƒپمƒ¥مƒ¼مƒˆمƒھم‚¢مƒ«مپ¯ros.orgمپ«é–¢مپ™م‚‹م‚¬م‚¤مƒ€مƒ³م‚¹مپ®مپںم‚پمپ«هˆ©ç”¨مپ§مپچم‚‹م‚µمƒ³مƒ—مƒ«مƒپمƒ¥مƒ¼مƒˆمƒھم‚¢مƒ«مپ«مپمپ£مپ¦مƒپمƒ¥مƒ¼مƒˆمƒھم‚¢مƒ«م‚’è¨کè؟°مپ™م‚‹مپںم‚پمپ®ن¾؟هˆ©مپھمƒ†مƒ³مƒ—مƒ¬مƒ¼مƒˆمپ¨مƒم‚¯مƒم‚’وٹ¼مپ•مپˆمپ¾مپ™م€‚
يٹœي† 리ى–¼ ى‘ى„±ي•ک기
5. ى´ يٹœي† 리ى–¼ى€ يٹœي† 리ى–¼ ى‘ى„±ى„ ىœ„ي•œ يٹœي† 리ى–¼ى…니다.
04
IncludeCSTemplate
è؟™ن¸ھه®ڈه°†é،µé¢é،¶ç«¯çڑ„ه…³é”®ه—转وچ¢ن¸؛clearsilverهڈکé‡ڈ,è؟™ن؛›هڈکé‡ڈهڈ¯ن»¥è¢«clearsilverو¨،و؟ه‘½ن»¤ن½؟用م€‚وœ¬و•™ç¨‹ن¸çڑ„ه…³é”®ه—被用هœ¨TutorialCSHeaderTemplateن¸
!<<IncludeCSTemplate(TutorialCSHeaderTemplate)>>
|
05
هµŒه…¥è§†é¢‘
è؟™ن¸ھه®ڈهڈ¯ن»¥هœ¨وœ¬ç»´هں؛ن¸و·»هٹ 视频م€‚ه°†و‚¨çڑ„视频و–‡çŒ®ن¸ٹن¼ 至Youtubeه¤¹ه¹¶ن½؟用è؟™ن¸ھه®ڈه‘½ن»¤وŒ‡هگ‘و‚¨çڑ„视频路ه¾„ه°±هڈ¯هœ¨و‚¨çڑ„و•™ç¨‹ن¸و·»هٹ 视频م€‚
و³¨و„ڈ: MediaServerه®ڈه·²هپœو¢ن½؟用,و‰€ن»¥ن½ ه؟…é،»é‡چو–°ن¸ٹن¼ ن½ çڑ„视频م€‚
è؟™ن¸ھن¾‹هگو¼”ç¤؛ن؛†ن¸€ن¸ھهœ¨wge100_cameraو–‡ن»¶ه¤¹ن¸çڑ„视频م€‚
|








