| 目前为止,在本章中我们已经看到了很多线程间划分工作的方法,影响性能的因素,以及这些因素是如何影响你选择数据访问模式和数据结构的。虽然,已经有了很多设计并发代码的内容。你还需要考虑很多事情,比如异常安全和可扩展性。随着系统中核数的增加,性能越来越高(无论是在减少执行时间,还是增加吞吐率),这样的代码称为“可扩展”代码。理想状态下,性能随着核数的增加线性增长,也就是当系统有100个处理器时,其性能是系统只有1核时的100倍。
虽然,非扩展性代码依旧可以正常工作——单线程应用就无法扩展——例如,异常安全是一个正确性问题。如果你的代码不是异常安全的,最终会破坏不变量,或是造成条件竞争,亦或是你的应用意外终止,因为某个操作会抛出异常。有了这个想法,我们就率先来看一下异常安全的问题。
8.4.1 并行算法中的异常安全
异常安全是衡量C++代码一个很重要的指标,并发代码也不例外。实际上,相较于串行算法,并行算法常会格外要求注意异常问题。当一个操作在串行算法中抛出一个异常,算法只需要考虑对其本身进行处理,以避免资源泄露和损坏不变量;这里可以允许异常传递给调用者,由调用者对异常进行处理。通过对比,在并行算法中很多操作要运行在独立的线程上。在这种情况下,异常就不再允许被传播,因为这将会使调用堆栈出现问题。如果一个函数在创建一个新线程后带着异常退出,那么这个应用将会终止。
作为一个具体的例子,让我们回顾一下清单2.8中的parallel_accumulate函数:
清单8.2 std::accumulate的原始并行版本(源于清单2.8)
template<typename Iterator,typename T>struct accumulate_block{ void operator()(Iterator first,Iterator last,T& result) { result=std::accumulate(first,last,result); // 1 }};template<typename Iterator,typename T>T parallel_accumulate(Iterator first,Iterator last,T init){ unsigned long const length=std::distance(first,last); // 2 if(!length) return init; unsigned long const min_per_thread=25; unsigned long const max_threads= (length+min_per_thread-1)/min_per_thread; unsigned long const hardware_threads= std::thread::hardware_concurrency(); unsigned long const num_threads= std::min(hardware_threads!=0?hardware_threads:2,max_threads); unsigned long const block_size=length/num_threads; std::vector<T> results(num_threads); // 3 std::vector<std::thread> threads(num_threads-1); // 4 Iterator block_start=first; // 5 for(unsigned long i=0;i<(num_threads-1);++i) { Iterator block_end=block_start; // 6 std::advance(block_end,block_size); threads[i]=std::thread( // 7 accumulate_block<Iterator,T>(), block_start,block_end,std::ref(results[i])); block_start=block_end; // 8 } accumulate_block()(block_start,last,results[num_threads-1]); // 9 std::for_each(threads.begin(),threads.end(), std::mem_fn(&std::thread::join)); return std::accumulate(results.begin(),results.end(),init); // 10}
|
现在让我们来看一下异常要在哪抛出:基本上就是在调用函数的地方抛出异常,或在用户定义类型上执行某个操作时可能抛出异常。
首先,需要调用distance②,其会对用户定义的迭代器类型进行操作。因为,这时还没有做任何事情,所以对于调用线程来说,所有事情都没问题。接下来,就需要分配results③和threads④。再后,调用线程依旧没有做任何事情,或产生新的线程,所以到这里也是没有问题的。当然,如果在构造threads抛出异常,那么对已经分配的results将会被清理,析构函数会帮你打理好一切。
跳过block_start⑤的初始化(因为也是安全的),来到了产生新线程的循环⑥⑦⑧。当在⑦处创建了第一个线程,如果再抛出异常,就会出问题的;对于新的std::thread对象将会销毁,程序将调用std::terminate来中断程序的运行。使用std::terminate的地方,可不是什么好地方。
accumulate_block⑨的调用就可能抛出异常,就会产生和上面类似的结果;线程对象将会被销毁,并且调用std::terminate。另一方面,最终调用std::accumulate⑩可能会抛出异常,不过处理起来没什么难度,因为所有的线程在这里已经汇聚回主线程了。
上面只是对于主线程来说的,不过还有很多地方会抛出异常:对于调用accumulate_block的新线程来说就会抛出异常①。没有任何catch块,所以这个异常不会被处理,并且当异常发生的时候会调用std::terminater()来终止应用的运行。
也许这里的异常问题并不明显,不过这段代码是非异常安全的。
添加异常安全
好吧,我们已经确定所有抛出异常的地方了,并且知道异常所带来的恶性后果。能为其做些什么呢?就让我们来解决一下在新线程上的异常问题。
在第4章时已经使用过工具来做这件事。如果你仔细的了解过新线程用来完成什么样的工作,要返回一个计算的结果的同时,允许代码产生异常。这可以将std::packaged_task和std::future相结合,来解决这个问题。如果使用std::packaged_task重新构造代码,代码可能会是如下模样。
清单8.3 使用std::packaged_task的并行std::accumulate
template<typename Iterator,typename T>struct accumulate_block{ T operator()(Iterator first,Iterator last) // 1 { return std::accumulate(first,last,T()); // 2 }};template<typename Iterator,typename T>T parallel_accumulate(Iterator first,Iterator last,T init){ unsigned long const length=std::distance(first,last); if(!length) return init; unsigned long const min_per_thread=25; unsigned long const max_threads= (length+min_per_thread-1)/min_per_thread; unsigned long const hardware_threads= std::thread::hardware_concurrency(); unsigned long const num_threads= std::min(hardware_threads!=0?hardware_threads:2,max_threads); unsigned long const block_size=length/num_threads; std::vector<std::future<T> > futures(num_threads-1); // 3 std::vector<std::thread> threads(num_threads-1); Iterator block_start=first; for(unsigned long i=0;i<(num_threads-1);++i) { Iterator block_end=block_start; std::advance(block_end,block_size); std::packaged_task<T(Iterator,Iterator)> task( // 4 accumulate_block<Iterator,T>()); futures[i]=task.get_future(); // 5 threads[i]=std::thread(std::move(task),block_start,block_end); // 6 block_start=block_end; } T last_result=accumulate_block()(block_start,last); // 7 std::for_each(threads.begin(),threads.end(), std::mem_fn(&std::thread::join)); T result=init; // 8 for(unsigned long i=0;i<(num_threads-1);++i) { result+=futures[i].get(); // 9 } result += last_result; // 10 return result;}
|
第一个修改就是调用accumulate_block的操作现在就是直接将结果返回,而非使用引用将结果存储在某个地方①。使用std::packaged_task和std::future是线程安全的,所以你可以使用它们来对结果进行转移。当调用std::accumulate②时,需要你显示传入T的默认构造函数,而非复用result的值,不过这只是一个小改动。
下一个改动就是,不用向量来存储结果,而使用futures向量为每个新生线程存储std::future<T>③。在新线程生成循环中,首先要为accumulate_block创建一个任务④。std::packaged_task<T(Iterator,Iterator)>声明,需要操作的两个Iterators和一个想要获取的T。然后,从任务中获取future⑤,再将需要处理的数据块的开始和结束信息传入⑥,让新线程去执行这个任务。当任务执行时,future将会获取对应的结果,以及任何抛出的异常。
使用future,就不能获得到一组结果数组,所以需要将最终数据块的结果赋给一个变量进行保存⑦,而非对一个数组进行填槽。同样,因为需要从future中获取结果,使用简单的for循环,就要比使用std::accumulate好的多;循环从提供的初始值开始⑧,并且将每个future上的值进行累加⑨。如果相关任务抛出一个异常,那么异常就会被future捕捉到,并且使用get()的时候获取数据时,这个异常会再次抛出。最后,在返回结果给调用者之前,将最后一个数据块上的结果添加入结果中⑩。
这样,一个问题就已经解决:在工作线程上抛出的异常,可以在主线程上抛出。如果不止一个工作线程抛出异常,那么只有一个能在主线程中抛出,不过这不会有产生太大的问题。如果这个问题很重要,你可以使用类似std::nested_exception来对所有抛出的异常进行捕捉。
剩下的问题就是,当生成第一个新线程和当所有线程都汇入主线程时,抛出异常;这样会让线程产生泄露。最简单的方法就是捕获所有抛出的线程,汇入的线程依旧是joinable()的,并且会再次抛出异常:
try{ for(unsigned long i=0;i<(num_threads-1);++i) { // ... as before } T last_result=accumulate_block()(block_start,last); std::for_each(threads.begin(),threads.end(), std::mem_fn(&std::thread::join));}catch(...){ for(unsigned long i=0;i<(num_thread-1);++i) { if(threads[i].joinable()) thread[i].join(); } throw;}
|
现在好了,无论线程如何离开这段代码,所有线程都可以被汇入。不过,try-catch很不美观,并且这里有重复代码。可以将“正常”控制流上的线程在catch块上执行的线程进行汇入。重复代码是没有必要的,因为这就意味着更多的地方需要改变。不过,现在让我们来提取一个对象的析构函数;毕竟,析构函数是C++中处理资源的惯用方式。看一下你的类:
class join_threads{ std::vector<std::thread>& threads;public: explicit join_threads(std::vector<std::thread>& threads_): threads(threads_) {} ~join_threads() { for(unsigned long i=0;i<threads.size();++i) { if(threads[i].joinable()) threads[i].join(); } }};
|
这个类和在清单2.3中看到的thread_guard类很相似,除了使用向量的方式来扩展线程量。用这个类简化后的代码如下所示:
清单8.4 异常安全版std::accumulate
template<typename Iterator,typename T>T parallel_accumulate(Iterator first,Iterator last,T init){ unsigned long const length=std::distance(first,last); if(!length) return init; unsigned long const min_per_thread=25; unsigned long const max_threads= (length+min_per_thread-1)/min_per_thread; unsigned long const hardware_threads= std::thread::hardware_concurrency(); unsigned long const num_threads= std::min(hardware_threads!=0?hardware_threads:2,max_threads); unsigned long const block_size=length/num_threads; std::vector<std::future<T> > futures(num_threads-1); std::vector<std::thread> threads(num_threads-1); join_threads joiner(threads); // 1 Iterator block_start=first; for(unsigned long i=0;i<(num_threads-1);++i) { Iterator block_end=block_start; std::advance(block_end,block_size); std::packaged_task<T(Iterator,Iterator)> task( accumulate_block<Iterator,T>()); futures[i]=task.get_future(); threads[i]=std::thread(std::move(task),block_start,block_end); block_start=block_end; } T last_result=accumulate_block()(block_start,last); T result=init; for(unsigned long i=0;i<(num_threads-1);++i) { result+=futures[i].get(); // 2 } result += last_result; return result;}
|
当创建了线程容器,就对新类型创建了一个实例①,可让退出线程进行汇入。然后,可以再显式的汇入循环中将线程删除,在原理上来说是安全的:因为线程,无论怎么样退出,都需要汇入主线程。注意这里对futures[i].get()②的调用,将会阻塞线程,直到结果准备就绪,所以这里不需要显式的将线程进行汇入。和清单8.2中的原始代码不同:原始代码中,你需要将线程汇入,以确保results向量被正确填充。不仅需要异常安全的代码,还需要较短的函数实现,因为这里已经将汇入部分的代码放到新(可复用)类型中去了。
std::async()的异常安全
现在,你已经了解了,当需要显式管理线程的时候,需要代码是异常安全的。那现在让我们来看一下使用std::async()是怎么样完成异常安全的。在本例中,标准库对线程进行了较好的管理,并且当“期望”处以就绪状态的时候,就能生成一个新的线程。对于异常安全,还需要注意一件事,如果在没有等待的情况下对“期望”实例进行销毁,析构函数会等待对应线程执行完毕后才执行。这就能桥面的必过线程泄露的问题,因为线程还在执行,且持有数据的引用。下面的代码将展示使用std::async()完成异常安全的实现。
清单8.5 异常安全并行版std::accumulate——使用std::async()
template<typename Iterator,typename T>T parallel_accumulate(Iterator first,Iterator last,T init){ unsigned long const length=std::distance(first,last); // 1 unsigned long const max_chunk_size=25; if(length<=max_chunk_size) { return std::accumulate(first,last,init); // 2 } else { Iterator mid_point=first; std::advance(mid_point,length/2); // 3 std::future<T> first_half_result= std::async(parallel_accumulate<Iterator,T>, // 4 first,mid_point,init); T second_half_result=parallel_accumulate(mid_point,last,T()); // 5 return first_half_result.get()+second_half_result; // 6 }}
|
这个版本对数据进行递归划分,而非在预计算后对数据进行分块;因此,这个版本要比之前的版本简单很多,并且这个版本也是异常安全的。和之前一样,一开始要确定序列的长度①,如果其长度小于数据块包含数据的最大数量,那么可以直接调用std::accumulate②。如果元素的数量超出了数据块包含数据的最大数量,那么就需要找到数量中点③,将这个数据块分成两部分,然后再生成一个异步任务对另一半数据进行处理④。第二半的数据是通过直接的递归调用来处理的⑤,之后将两个块的结果加和到一起⑥。标准库能保证std::async的调用能够充分的利用硬件线程,并且不会产生线程的超额认购,一些“异步”调用是在调用get()⑥后同步执行的。
优雅的地方,不仅在于利用硬件并发的优势,并且还能保证异常安全。如果有异常在递归调用⑤中抛出,通过调用std::async④所产生的“期望”,将会在异常传播时被销毁。这就需要依次等待异步任务的完成,因此也能避免悬空线程的出现。另外,当异步任务抛出异常,且被future所捕获,在对get()⑥调用的时候,future中存储的异常,会再次抛出。
除此之外,在设计并发代码的时候还要考虑哪些其他因素?让我们来看一下扩展性 (scalability)。随着系统中核数的增加,应用性能如何提升?
8.4.2 可扩展性和Amdahl定律
扩展性代表了应用利用系统中处理器执行任务的能力。一种极端就是将应用写死为单线程运行,这种应用就是完全不可扩展的;即使添加了100个处理器到你的系统中,应用的性能都不会有任何改变。另一种就是像SETI@Home[3]项目一样,让应用使用系统中成千上万的处理器(以个人电脑的形式加入网络的用户)成为可能。
对于任意的多线程程序,在程序运行的时候,运行的工作线程数量会有所不同。应用初始阶段只有一个线程,之后会在这个线程上衍生出新的线程。理想状态:每个线程都做着有用的工作,不过这种情况几乎是不可能发生的。线程通常会花时间进行互相等待,或等待I/O操作的完成。
一种简化的方式就是就是将程序划分成“串行”部分和“并行”部分。串行部分:只能由单线程执行一些工作的地方。并行部分:可以让所有可用的处理器一起工作的部分。当在多处理系统上运行你的应用时,“并行”部分理论上会完成的相当快,因为其工作被划分为多份,放在不同的处理器上执行。“串行”部分则不同,还是只能一个处理器执行所有工作。这样(简化)假设下,就可以对随着处理数量的增加,估计一下性能的增益:当程序“串行”部分的时间用fs来表示,那么性能增益(P)就可以通过处理器数量(N)进行估计:
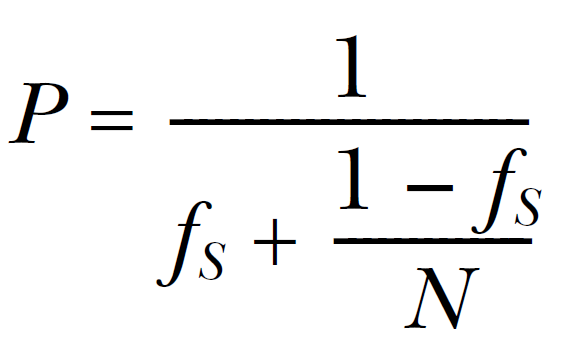
这就是Amdahl定律,在讨论并发程序性能的时候都会引用到的公式。如果每行代码都能并行化,串行部分就为0,那么性能增益就为N。或者,当串行部分为1/3时,当处理器数量无限增长,你都无法获得超过3的性能增益。
Amdahl定律明确了,对代码最大化并发可以保证所有处理器都能用来做有用的工作。如果将“串行”部分的减小,或者减少线程的等待,就可以在多处理器的系统中获取更多的性能收益。或者,当能提供更多的数据让系统进行处理,并且让并行部分做最重要的工作,就可以减少“串行”部分,以获取更高的性能增益。
扩展性:当有更多的处理器加入时,减少一个动作的执行时间,或在给定时间内做更多工作。有时这两个指标是等价的(如果处理器的速度相当快,那么就可以处理更多的数据),有时不是。选择线程间的工作划分的技术前,辨别哪些方面是能否扩展的就十分的重要。
本节开始已经提到,线程并非任何时候都做的是有用的工作。有时,它们会等待其他线程,或者等待I/O完成,亦或是等待其他的事情。如果线程在等待的时候,系统中还有必要的任务需要完成时,就可以将等待“隐藏”起来。
8.4.3 使用多线程隐藏延迟
之前讨论了很多有关多线程性能的话题。现在假设,线程在一个处理器上运行时不会偷懒,并且做的工作都很有用。当然,这只是假设;在实际应用中,线程会经常因为等待某些事情而阻塞。
不论等待的理由是什么,如果有和系统中物理单元相同数量的线程,那么线程阻塞就意味着在等待CPU时间片。处理器将会在阻塞的时间内运行另一个线程,而不是什么事情都不做。因此,当知道一些线程需要像这样耗费相当一段时间进行等待时,可以利用CPU的空闲时间去运行一个或多个线程。
试想一个病毒扫描程序,使用流水线对线程间的工作进行划分。第一个线程对文件系统中的文件进行检查,并将它们放入一个队列中。同时,另一个线程从队列中获取文件名,加载文件,之后对它们进行病毒扫描。线程对文件系统中的文件进行扫描就会受到I/O操作的限制,所以可以通过执行额外的扫描线程,充分利用CPU的“空闲”时间。这时还需要一个文件搜索线程,以及足够多的扫描线程。当扫描线程为了扫描文件,还要从磁盘上读取到重要部分的文件时,就能体会到多扫描线程的意义所在了。不过,在某些时候线程也过于多,系统将会因为越来越多的任务切换而降低效率,就像8.2.5节描述的那样。
同之前一样,这也是一种优化,对修改(线程数量)前后性能的测量很重要;优化的线程数量高度依赖要完成工作的先天属性,以及等待时间所占的百分比。
应用可能不用额外的线程,而使用CPU的空闲时间。例如,如果一个线程因为I/O操作被阻塞,这个线程可能会使用异步I/O(如果可以用的话),当I/O操作在后台执行完成后,线程就可以做其他有用的工作了。在其他情况下,当一个线程等待其他线程去执行一个操作时,比起阻塞,不如让阻塞线程自己来完成这个操作,就像在第7章中看到的无锁队列那样。在一个极端的例子中,当一个线程等待一个任务完成,并且这个任务还没有被其他任何线程所执行时,等待线程就可以执行这个任务,或执行另一个不完整的任务。在清单8.1中看到这样的例子,排序函数持续的尝试对数据进行排序,即使那些数据已经不需要排序了。
比起添加线程数量让其对处理器进行充分利用,有时也要在增加线程的同时,确保外部事件被及时的处理,以提高系统的响应能力。
8.4.4 使用并发提高响应能力
很多流行的图形化用户接口框架都是事件驱动型(event driven);对图形化接口进行操作是通过按下按键或移动鼠标进行,将产生一系列需要应用处理的事件或信息。系统也可能产生信息或事件。为了确定所有事件和信息都能被正确的处理,应用通常会有一个事件循环,就像下面的代码:
while(true){ event_data event=get_event(); if(event.type==quit) break; process(event);}
|
显然,API中的细节可能不同,不过结构通常是一样的:等待一个事件,对其做必要的处理,之后等待下一个事件。如果是一个单线程应用,那么就会让长期任务很难书写,如同在8.1.3节中所描述。为了确保用户输入被及时的处理,无论应时在做些什么,get_event()和process()必须以合理的频率调用。这就意味着任务要被周期性的悬挂,并且返回到事件循环中,或get_event()/process()必须在一个合适地方进行调用。每个选项的复杂程度取决于任务的实现方式。
通过使用并发分离关注,可以将一个很长的任务交给一个全新的线程,并且留下一个专用的GUI线程来处理这些事件。线程可以通过简单的机制进行通讯,而不是将事件处理代码和任务代码混在一起。下面的例子就是展示了这样的分离。
清单8.6 将GUI线程和任务线程进行分离
std::thread task_thread;std::atomic<bool> task_cancelled(false);void gui_thread(){ while(true) { event_data event=get_event(); if(event.type==quit) break; process(event); }}void task(){ while(!task_complete() && !task_cancelled) { do_next_operation(); } if(task_cancelled) { perform_cleanup(); } else { post_gui_event(task_complete); }}void process(event_data const& event){ switch(event.type) { case start_task: task_cancelled=false; task_thread=std::thread(task); break; case stop_task: task_cancelled=true; task_thread.join(); break; case task_complete: task_thread.join(); display_results(); break; default: //... }}
|
通过这种方式对关注进行分离,用户线程将总能及时的对事件进行响应,及时完成任务需要花费很长事件。使用应用的时候,响应事件通常也是影响用户体验的重要一点;无论是特定操作被不恰当的执行(无论是什么操作),应用都会被完全锁住。通过使用专门的事件处理线程,GUI就能处理GUI指定的信息了(比如对于调整窗口的大小或颜色),而不需要中断处理器,进行耗时的处理;同时,还能向长期任务传递相关的信息。
现在,你可以将本章中在设计并发代码时要考虑的所有问题进行一下回顾。作为一个整体,它们都很具有代表性,不过当你熟练的使用“多线程编程”时,考虑其中的很多问题将变成你习惯。如果你是初学者,我希望这些例子能让你明白,这些问题是如何影响多线程代码的。 |








