Description: وœ¬و•™ç¨‹ن»‹ç»چن؛†ROSè¯é¢ک,ن»¥هڈٹه¦‚ن½•ن½؟用rostopicه’Œrqt_plotه‘½ن»¤è،Œه·¥ه…·م€‚
Tutorial Level: BEGINNER
1ه¼€ه§‹
1.1roscore
首ه…ˆç،®ن؟roscoreو£هœ¨è؟گè،Œ, و‰“ه¼€ن¸€ن¸ھو–°ç»ˆç«¯ï¼ڑ
ه¦‚وœن½ و²،وœ‰é€€ه‡؛هœ¨ن¸ٹن¸€ç¯‡و•™ç¨‹ن¸è؟گè،Œçڑ„roscore,هˆ™هڈ¯èƒ½ن¼ڑوک¾ç¤؛错误و¶ˆوپ¯ï¼ڑ
roscore cannot run as another
roscore/master is already running.
Please kill other roscore/master processes
before relaunching
|
è؟™وک¯و£ه¸¸çڑ„,ه› ن¸؛هڈھ需è¦پوœ‰ن¸€ن¸ھroscoreهœ¨è؟گè،Œه°±ه¤ںن؛†م€‚
1.2turtlesim
هœ¨وœ¬و•™ç¨‹ن¸وˆ‘ن»¬ن¹ںن¼ڑن½؟用هˆ°turtlesim,و‰“ه¼€ن¸€ن¸ھو–°ç»ˆç«¯ï¼ڑ
$
rosrun turtlesim turtlesim_node |
1.3é€ڑè؟‡é”®ç›کéپ¥وژ§turtle
وˆ‘ن»¬è؟ک需è¦پé€ڑè؟‡é”®ç›کو¥وژ§هˆ¶turtle,و‰“ه¼€ن¸€ن¸ھو–°ç»ˆç«¯ï¼ڑ
$
rosrun turtlesim turtle_teleop_key |
[ INFO] 1254264546.878445000:
Started node [/teleop_turtle],
pid [5528], bound on [aqy],
xmlrpc port [43918], tcpros
port [55936], logging to
[~/ros/ros/log/teleop_turtle
_5528.log], using [real] time
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
|
çژ°هœ¨ن½ هڈ¯ن»¥ن½؟用键ç›کن¸ٹçڑ„و–¹هگ‘é”®و¥وژ§هˆ¶turtleè؟گهٹ¨ن؛†م€‚ه¦‚وœن¸چ能وژ§هˆ¶ï¼Œè¯·é€‰ن¸turtle_teleop_keyçڑ„终端çھ—هڈ£ن»¥ç،®ن؟وŒ‰é”®è¾“ه…¥èƒ½ه¤ں被وچ•èژ·م€‚
çژ°هœ¨هڈ¯ن»¥è®©ن¹Œé¾ںو¥ه›èµ°هٹ¨ن؛†ï¼Œè®©وˆ‘ن»¬çœ‹çœ‹ه¹•هگژهڈ‘ç”ںçڑ„ن؛‹وƒ…م€‚
2 ROSè¯é¢ک
turtlesim_nodeèٹ‚点ه’Œturtle_teleop_keyèٹ‚点ن¹‹é—´وک¯é€ڑè؟‡ن¸€ن¸ھROSè¯é¢کو¥ç›¸ن؛’é€ڑن؟،çڑ„م€‚turtle_teleop_keyهœ¨è¯é¢کن¸ٹهڈ‘ه¸ƒé”®ç›کوŒ‰ن¸‹çڑ„و¶ˆوپ¯ï¼Œturtlesimهˆ™è®¢éک…该è¯é¢کن»¥وژ¥و”¶و¶ˆوپ¯م€‚让وˆ‘ن»¬ن½؟用rqt_graphو¥وک¾ç¤؛ه½“ه‰چè؟گè،Œçڑ„èٹ‚点ه’Œè¯é¢کم€‚
و³¨و„ڈï¼ڑه¦‚وœن½ ن½؟用çڑ„وک¯ROS electricوˆ–و—©وœں版وœ¬ï¼Œé‚£ن¹ˆrqtوک¯ن¸چهڈ¯ç”¨çڑ„,请ن½؟用rxgraphن»£و›؟م€‚
2.1ن½؟用rqt_graph
rqt_graph用هٹ¨و€پçڑ„ه›¾وک¾ç¤؛ن؛†ç³»ç»ںن¸و£هœ¨هڈ‘ç”ںçڑ„ن؛‹وƒ…م€‚rqt_graphوک¯rqt程ه؛ڈهŒ…ن¸çڑ„ن¸€éƒ¨هˆ†م€‚ه¦‚وœن½ هڈ‘çژ°و²،وœ‰ه®‰è£…,请ï¼ڑ
$ sudo apt-get install ros-<distro>-rqt
$ sudo apt-get install ros-<distro>
-rqt-common-plugins
|
ه°†<distro>و›؟وچ¢وˆگن½ ه®‰è£…çڑ„ROSهڈ‘è،Œç‰ˆç®€ç§°ï¼ˆو¯”ه¦‚kineticوˆ–noeticç‰ï¼‰م€‚
و‰“ه¼€ن¸€ن¸ھو–°ç»ˆç«¯ï¼ڑ
$
rosrun rqt_graph rqt_graph |
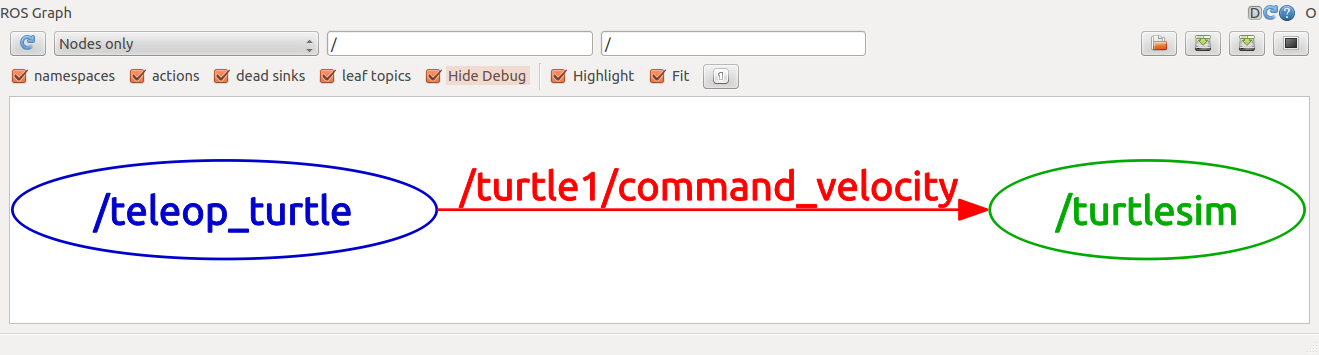
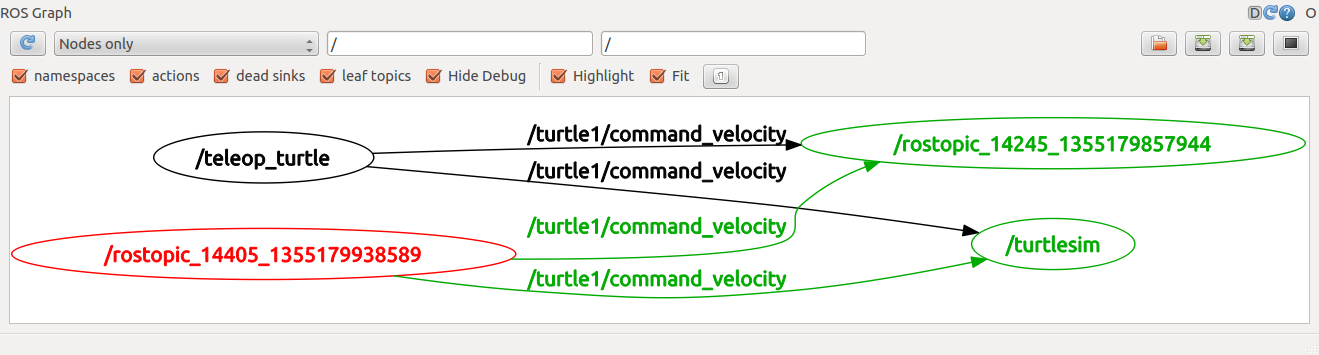
ن½ ن¼ڑ看هˆ°ن¸€ن¸ھçھ—هڈ£ï¼ڑ
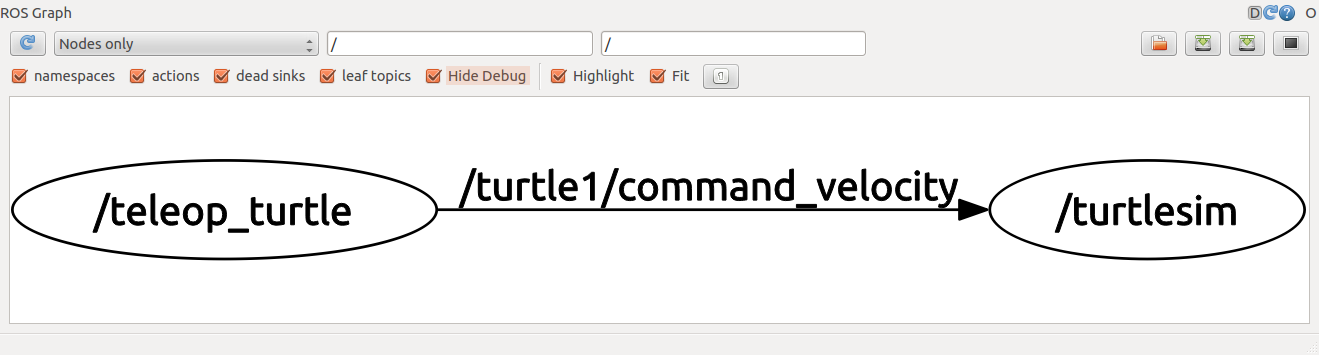
ه¦‚وœوٹٹé¼ و ‡و”¾هœ¨/turtle1/command_velocityن¸ٹو–¹ï¼Œç›¸ه؛”çڑ„ROSèٹ‚点(è؟™é‡Œوک¯è“色ه’Œç»؟色)ه’Œè¯é¢ک(è؟™é‡Œوک¯ç؛¢è‰²ï¼‰ه°±ن¼ڑé«کن؛®وک¾ç¤؛م€‚هڈ¯ن»¥çœ‹هˆ°ï¼Œturtlesim_nodeه’Œturtle_teleop_keyèٹ‚点و£é€ڑè؟‡ن¸€ن¸ھهگچن¸؛/turtle1/command_velocityçڑ„è¯é¢کو¥ç›¸ن؛’é€ڑن؟،م€‚
2.2ن»‹ç»چrostopic
rostopicه‘½ن»¤ه·¥ه…·èƒ½è®©ن½ èژ·هڈ–ROSè¯é¢کçڑ„ن؟،وپ¯م€‚
ن½ هڈ¯ن»¥ن½؟用ه¸®هٹ©é€‰é،¹وں¥çœ‹هڈ¯ç”¨çڑ„rostopicçڑ„هگه‘½ن»¤ï¼Œن¾‹ه¦‚ï¼ڑ
rostopic is a command-line tool
for printing information about ROS Topics.
Commands:
rostopic bw
display bandwidth used by topic
rostopic delay
display delay of topic from timestamp in header
rostopic echo
print messages to screen
rostopic find
find topics by type
rostopic hz
display publishing rate of topic
rostopic info
print information about active topic
rostopic list
list active topics
rostopic pub
publish data to topic
rostopic type
print topic or field type
Type rostopic <command> -h for
more detailed usage, e.g. 'rostopic echo -h'
|
وˆ–者هœ¨è¾“ه…¥rostopic ن¹‹هگژهڈŒه‡»Tab键输ه‡؛هڈ¯èƒ½çڑ„هگه‘½ن»¤ï¼ڑ
$ rostopic
bw echo find hz info
list pub type
|
وژ¥ن¸‹و¥وˆ‘ن»¬ه°†ن½؟用ه…¶ن¸çڑ„ن¸€ن؛›هگه‘½ن»¤و¥è°ƒوں¥turtlesimم€‚
2.3ن½؟用rostopic echo
rostopic echoهڈ¯ن»¥وک¾ç¤؛هœ¨وںگن¸ھè¯é¢کن¸ٹهڈ‘ه¸ƒçڑ„و•°وچ®م€‚
用و³•ï¼ڑ
让وˆ‘ن»¬çœ‹çœ‹ç”±turtle_teleop_keyèٹ‚点هڈ‘ه¸ƒçڑ„“وŒ‡ن»¤م€پé€ںه؛¦â€و•°وچ®م€‚
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œè؟™ن؛›و•°وچ®هڈ‘ه¸ƒهœ¨/turtle1/cmd_velè¯é¢کن¸ٹم€‚و‰“ه¼€ن¸€ن¸ھو–°ç»ˆç«¯ï¼ڑ
$
rostopic echo /turtle1/cmd_vel |
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œè؟™ن؛›و•°وچ®هڈ‘ه¸ƒهœ¨/turtle1/command_velocityè¯é¢کن¸ٹم€‚و‰“ه¼€ن¸€ن¸ھو–°ç»ˆç«¯ï¼ڑ
$
rostopic echo /turtle1/command_velocity
|
ن½ هڈ¯èƒ½ن¼ڑ看هˆ°ن»€ن¹ˆéƒ½و²،هڈ‘ç”ں,ه› ن¸؛çژ°هœ¨è؟کو²،وœ‰و•°وچ®è¢«هڈ‘ه¸ƒهˆ°è¯¥è¯é¢کن¸ٹم€‚هڈ¯ن»¥é€ڑè؟‡وŒ‰ن¸‹é”®ç›کو–¹هگ‘键让turtle_teleop_keyèٹ‚点هڈ‘ه¸ƒو•°وچ®م€‚è®°ه¾—ه¦‚وœن¸چ能وژ§هˆ¶ن¹Œé¾ں,请选ن¸turtle_teleop_keyçڑ„终端çھ—هڈ£ن»¥ç،®ن؟وŒ‰é”®è¾“ه…¥èƒ½ه¤ں被وچ•èژ·م€‚
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œه½“وŒ‰ن¸‹هگ‘ن¸ٹé”®و—¶ï¼Œه؛”该看هˆ°ن»¥ن¸‹ه†…ه®¹ï¼ڑ
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
|
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œه½“وŒ‰ن¸‹هگ‘ن¸ٹé”®و—¶ï¼Œه؛”该看هˆ°ن»¥ن¸‹ه†…ه®¹ï¼ڑ
---
linear: 2.0
angular: 0.0
---
linear: 2.0
angular: 0.0
---
linear: 2.0
angular: 0.0
---
linear: 2.0
angular: 0.0
---
linear: 2.0
angular: 0.0
|
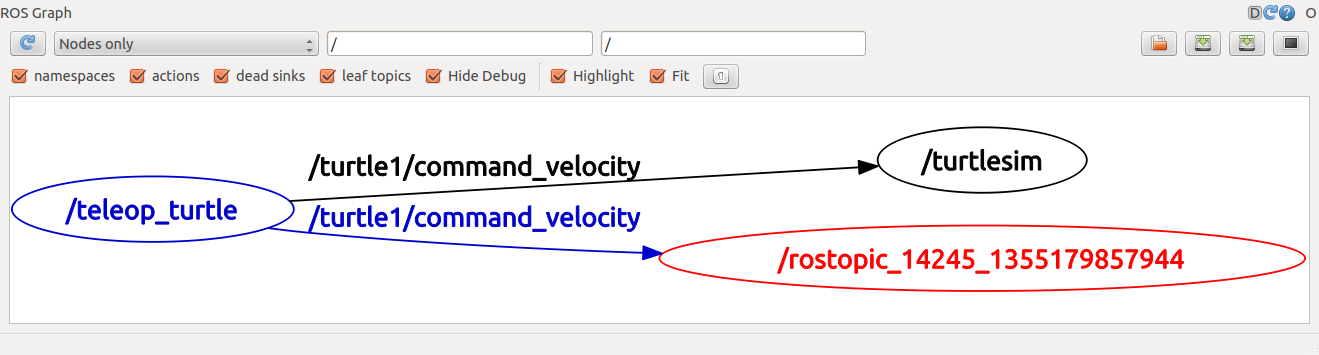
çژ°هœ¨è®©وˆ‘ن»¬ه†چ看ن¸€ن¸‹rqt_graphم€‚ه…ˆوŒ‰ن¸‹ه·¦ن¸ٹ角çڑ„هˆ·و–°وŒ‰é’®ن»¥وک¾ç¤؛و–°èٹ‚点م€‚و£ه¦‚ن½ و‰€çœ‹هˆ°çڑ„,rostopic
echo(è؟™é‡Œن»¥ç؛¢è‰²وک¾ç¤؛)çژ°هœ¨ن¹ں订éک…ن؛†turtle1/command_velocityè¯é¢کم€‚
2.4ن½؟用rostopic list
rostopic list能ه¤ںهˆ—ه‡؛ه½“ه‰چه·²è¢«è®¢éک…ه’Œهڈ‘ه¸ƒçڑ„و‰€وœ‰è¯é¢کم€‚
让وˆ‘ن»¬وں¥çœ‹ن¸€ن¸‹listهگه‘½ن»¤éœ€è¦پçڑ„هڈ‚و•°م€‚و‰“ه¼€ن¸€ن¸ھو–°ç»ˆç«¯ï¼ڑ
Usage: rostopic list [/topic]
Options:
-h, --help show this help message and exit
-b BAGFILE, --bag=BAGFILE
list topics in .bag file
-v, --verbose list full details about each topic
-p list only publishers
-s list only subscribers
|
هœ¨rostopic listن¸ن½؟用verbose选é،¹ï¼ڑ
ن¼ڑهˆ—ه‡؛و‰€وœ‰هڈ‘ه¸ƒه’Œè®¢éک…çڑ„ن¸»é¢کهڈٹه…¶ç±»ه‹çڑ„详细ن؟،وپ¯م€‚
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œ
Published topics:
* /turtle1/color_sensor [turtlesim/Color] 1
publisher
* /turtle1/cmd_vel [geometry_msgs/Twist] 1
publisher
* /rosout [rosgraph_msgs/Log] 2 publishers
* /rosout_agg [rosgraph_msgs/Log] 1 publisher
* /turtle1/pose [turtlesim/Pose] 1 publisher
Subscribed topics:
* /turtle1/cmd_vel [geometry_msgs/Twist] 1
subscriber
* /rosout [rosgraph_msgs/Log] 1 subscriber
|
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œ
Published topics:
* /turtle1/color_sensor [turtlesim/Color] 1
publisher
* /turtle1/command_velocity [turtlesim/Velocity] 1
publisher
* /rosout [roslib/Log] 2 publishers
* /rosout_agg [roslib/Log] 1 publisher
* /turtle1/pose [turtlesim/Pose] 1 publisher
Subscribed topics:
* /turtle1/command_velocity [turtlesim/Velocity] 1
subscriber
* /rosout [roslib/Log] 1 subscriber
|
3
ROSو¶ˆوپ¯
è¯é¢کçڑ„é€ڑن؟،وک¯é€ڑè؟‡èٹ‚点间هڈ‘é€پROSو¶ˆوپ¯ه®çژ°çڑ„م€‚ن¸؛ن؛†ن½؟هڈ‘ه¸ƒè€…(turtle_teleop_key)ه’Œè®¢éک…者(turtulesim_node)è؟›è،Œé€ڑن؟،,هڈ‘ه¸ƒè€…ه’Œè®¢éک…者ه؟…é،»هڈ‘é€په’Œوژ¥و”¶ç›¸هگŒç±»ه‹çڑ„و¶ˆوپ¯م€‚è؟™و„ڈه‘³ç€è¯é¢کçڑ„ç±»ه‹وک¯ç”±هڈ‘ه¸ƒهœ¨ه®ƒن¸ٹé¢و¶ˆوپ¯çڑ„ç±»ه‹ه†³ه®ڑçڑ„م€‚ن½؟用rostopic
typeه‘½ن»¤هڈ¯ن»¥وں¥çœ‹هڈ‘ه¸ƒهœ¨è¯é¢کن¸ٹçڑ„و¶ˆوپ¯çڑ„ç±»ه‹م€‚
3.1ن½؟用rostopic type
rostopic typeه‘½ن»¤ç”¨و¥وں¥çœ‹و‰€هڈ‘ه¸ƒè¯é¢کçڑ„و¶ˆوپ¯ç±»ه‹م€‚
用و³•ï¼ڑ
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œ
è؟گè،Œï¼ڑ
$
rostopic type /turtle1/cmd_vel |
ن½ ن¼ڑ看هˆ°ï¼ڑ
وˆ‘ن»¬هڈ¯ن»¥ن½؟用rosmsgوں¥çœ‹و¶ˆوپ¯çڑ„详细ن؟،وپ¯ï¼ڑ
$
rosmsg show geometry_msgs/Twist |
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
|
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œ
è؟گè،Œï¼ڑ
$
rostopic type /turtle1/command_velocity
|
ن½ ن¼ڑ看هˆ°ï¼ڑ
وˆ‘ن»¬هڈ¯ن»¥ن½؟用rosmsgوں¥çœ‹و¶ˆوپ¯çڑ„详细ن؟،وپ¯ï¼ڑ
$
rosmsg show turtlesim/Velocity |
float32
linear
float32 angular |
çژ°هœ¨وˆ‘ن»¬ه·²ç»ڈçں¥éپ“ن؛†turtlesimèٹ‚点وƒ³è¦پçڑ„و¶ˆوپ¯ç±»ه‹ï¼Œç„¶هگژه°±هڈ¯ن»¥هڈ‘ه¸ƒه‘½ن»¤ç»™turtleن؛†م€‚
4 继ç»ه¦ن¹ rostopic
و—¢ç„¶وˆ‘ن»¬ه·²ç»ڈن؛†è§£ن؛†ROSو¶ˆوپ¯ï¼Œوژ¥ن¸‹و¥وˆ‘ن»¬ç»“هگˆو¶ˆوپ¯و¥ن½؟用rostopicم€‚
4.1 ن½؟用rostopic pub
rostopic pubهڈ¯ن»¥وٹٹو•°وچ®هڈ‘ه¸ƒهˆ°ه½“ه‰چوںگن¸ھو£هœ¨ه¹؟و’çڑ„è¯é¢کن¸ٹم€‚
用و³•ï¼ڑ
rostopic
pub [topic] [msg_type] [args] |
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œç¤؛ن¾‹ï¼ڑ
$
rostopic pub -1 /turtle1/cmd_vel
geometry_msgs/Twist
-- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]' |
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œç¤؛ن¾‹ï¼ڑ
$
rostopic pub -1 /turtle1/command_
velocity
turtlesim/Velocity -- 2.0 1.8 |
ن»¥ن¸ٹه‘½ن»¤ن¼ڑهڈ‘é€پن¸€و،و¶ˆوپ¯ç»™turtlesim,ه‘ٹ诉ه®ƒن»¥2.0ه¤§ه°ڈçڑ„ç؛؟é€ںه؛¦ه’Œ1.8ه¤§ه°ڈçڑ„角é€ںه؛¦ç§»هٹ¨م€‚
è؟™وک¯ن¸€ن¸ھهچپهˆ†ه¤چو‚çڑ„ن¾‹هگ,ه› و¤è®©وˆ‘ن»¬و¥è¯¦ç»†هˆ†وگن¸€ن¸‹ه…¶ن¸çڑ„و¯ڈن¸€ن¸ھهڈ‚و•°م€‚
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œ
è؟™و،ه‘½ن»¤ه°†و¶ˆوپ¯هڈ‘ه¸ƒهˆ°وŒ‡ه®ڑçڑ„è¯é¢کï¼ڑ
è؟™ن¸€é€‰é،¹ن¼ڑ让rostopicهڈھهڈ‘ه¸ƒن¸€و،و¶ˆوپ¯ï¼Œç„¶هگژ退ه‡؛ï¼ڑ
è؟™وک¯è¦پهڈ‘ه¸ƒهˆ°çڑ„è¯é¢کçڑ„هگچ称ï¼ڑ
è؟™وک¯هڈ‘ه¸ƒهˆ°è¯é¢کو—¶è¦پن½؟用çڑ„و¶ˆوپ¯çڑ„ç±»ه‹ï¼ڑ
è؟™ن¸€é€‰é،¹ï¼ˆن¸¤ن¸ھç ´وٹکهڈ·ï¼‰ç”¨و¥ه‘ٹ诉选é،¹è§£وگه™¨ï¼Œè،¨وکژن¹‹هگژçڑ„هڈ‚و•°éƒ½ن¸چوک¯é€‰é،¹م€‚ه¦‚وœهڈ‚و•°ه‰چوœ‰ç ´وٹکهڈ·ï¼ˆ-)و¯”ه¦‚è´ںو•°ï¼Œé‚£ن¹ˆè؟™وک¯ه؟…需çڑ„م€‚
ه¦‚ه‰چو‰€è؟°ï¼Œن¸€ن¸ھturtlesim/Velocityو¶ˆوپ¯وœ‰ن¸¤ن¸ھوµ®ç‚¹ه‹ه…ƒç´ ï¼ڑlinearه’Œangularم€‚هœ¨وœ¬ن¾‹ن¸ï¼Œ'[2.0,
0.0, 0.0]'è،¨ç¤؛linearçڑ„ه€¼ن¸؛x=2.0, y=0.0, z=0.0,而'[0.0,
0.0, 1.8]'وک¯è¯´angularçڑ„ه€¼ن¸؛x=0.0, y=0.0, z=1.8م€‚è؟™ن؛›هڈ‚و•°ه®é™…ن¸ٹن½؟用çڑ„وک¯YAMLè¯و³•ï¼Œهœ¨YAMLه‘½ن»¤è،Œو–‡و،£ن¸وœ‰وڈڈè؟°م€‚
'[2.0,
0.0, 0.0]' '[0.0, 0.0, 1.8]' |
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œ
è؟™و،ه‘½ن»¤ه°†و¶ˆوپ¯هڈ‘ه¸ƒهˆ°وŒ‡ه®ڑçڑ„è¯é¢کï¼ڑ
è؟™ن¸€é€‰é،¹ن¼ڑ让rostopicهڈھهڈ‘ه¸ƒن¸€و،و¶ˆوپ¯ï¼Œç„¶هگژ退ه‡؛ï¼ڑ
è؟™وک¯è¦پهڈ‘ه¸ƒهˆ°çڑ„è¯é¢کçڑ„هگچ称ï¼ڑ
/turtle1/command_velocity
|
è؟™وک¯هڈ‘ه¸ƒهˆ°è¯é¢کو—¶è¦پن½؟用çڑ„و¶ˆوپ¯çڑ„ç±»ه‹ï¼ڑ
è؟™ن¸€é€‰é،¹ï¼ˆن¸¤ن¸ھç ´وٹکهڈ·ï¼‰ç”¨و¥ه‘ٹ诉选é،¹è§£وگه™¨ï¼Œè،¨وکژن¹‹هگژçڑ„هڈ‚و•°éƒ½ن¸چوک¯é€‰é،¹م€‚ه¦‚وœهڈ‚و•°ه‰چوœ‰ç ´وٹکهڈ·ï¼ˆ-)و¯”ه¦‚è´ںو•°ï¼Œé‚£ن¹ˆè؟™وک¯ه؟…需çڑ„م€‚
--
ه¦‚ه‰چو‰€è؟°ï¼Œن¸€ن¸ھturtlesim/Velocityو¶ˆوپ¯وœ‰ن¸¤ن¸ھوµ®ç‚¹ه‹ه…ƒç´ ï¼ڑlinearه’Œangularم€‚هœ¨وœ¬ن¾‹ن¸ï¼Œ2.0وک¯linearçڑ„ه€¼ï¼Œè€Œ1.8هˆ™وک¯angularçڑ„ه€¼م€‚è؟™ن؛›هڈ‚و•°ه®é™…ن¸ٹن½؟用çڑ„وک¯YAMLè¯و³•ï¼Œهœ¨YAMLه‘½ن»¤è،Œو–‡و،£ن¸وœ‰وڈڈè؟°م€‚
ن½ هڈ¯èƒ½ه·²ç»ڈو³¨و„ڈهˆ°turtleه·²ç»ڈهپœو¢ç§»هٹ¨ن؛†م€‚è؟™وک¯ه› ن¸؛turtle需è¦پن¸€ن¸ھ稳ه®ڑçڑ„频çژ‡ن¸؛1Hzçڑ„وŒ‡ن»¤وµپو‰چ能ن؟وŒپ移هٹ¨çٹ¶و€پم€‚وˆ‘ن»¬هڈ¯ن»¥ن½؟用rostopic
pub -rه‘½ن»¤و¥هڈ‘ه¸ƒو؛گو؛گن¸چو–çڑ„ه‘½ن»¤ï¼ڑ
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œ
$
rostopic pub /turtle1/cmd_vel geometry_
msgs/Twist
-r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
|
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œ
$
rostopic pub /turtle1/command_velocity
turtlesim/Velocity
-r 1 -- 2.0 -1.8 |
è؟™ه°†ن»¥1 Hzçڑ„é€ںه؛¦هڈ‘ه¸ƒvelocityوŒ‡ن»¤هˆ°velocityè¯é¢کن¸ٹم€‚
وˆ‘ن»¬è؟کهڈ¯ن»¥çœ‹ن¸€ن¸‹rqt_graphن¸çڑ„وƒ…ه½¢م€‚وŒ‰ه·¦ن¸ٹ角çڑ„هˆ·و–°وŒ‰é’®ï¼Œهڈ¯ن»¥çœ‹هˆ°rostopic
pubèٹ‚点(و¤ه¤„ن¸؛ç؛¢è‰²ï¼‰و£هœ¨ن¸ژrostopic echoèٹ‚点(و¤ه¤„ن¸؛ç»؟色)è؟›è،Œé€ڑن؟،ï¼ڑ
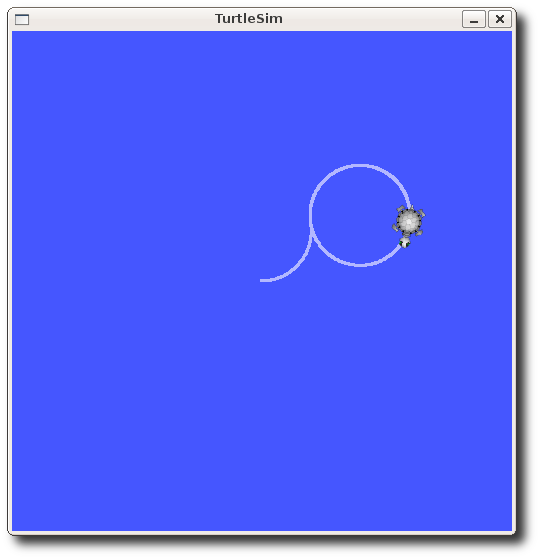
هڈ¯ن»¥çœ‹هˆ°ï¼Œturtleو£و²؟ç€ن¸€ن¸ھهœ†ه½¢è½¨è؟¹وŒپç»è؟گهٹ¨م€‚وˆ‘ن»¬هڈ¯ن»¥هœ¨و–°ç»ˆç«¯ن¸é€ڑè؟‡rostopic
echoه‘½ن»¤و¥وں¥çœ‹turtlesimو‰€هڈ‘ه¸ƒçڑ„و•°وچ®ï¼ڑ
rostopic
echo /turtle1/pose |
4.2
ن½؟用rostopic hz
rostopic hzوٹ¥ه‘ٹو•°وچ®هڈ‘ه¸ƒçڑ„é€ںçژ‡م€‚
用و³•ï¼ڑ
وˆ‘ن»¬çœ‹ن¸€ن¸‹turtlesim_nodeهڈ‘ه¸ƒ/turtle/poseه¾—وœ‰ه¤ڑه؟«ï¼ڑ
$ rostopic hz /turtle1/pose
|
ن½ ن¼ڑ看هˆ°ï¼ڑ
subscribed to [/turtle1/pose]
average rate: 59.354
min: 0.005s max: 0.027s
std dev: 0.00284s window: 58
average rate: 59.459
min: 0.005s max: 0.027s
std dev: 0.00271s window: 118
average rate: 59.539
min: 0.004s max: 0.030s
std dev: 0.00339s window: 177
average rate: 59.492
min: 0.004s max: 0.030s
std dev: 0.00380s window: 237
average rate: 59.463
min: 0.004s max: 0.030s
std dev: 0.00380s window: 290
|
çژ°هœ¨وˆ‘ن»¬هڈ¯ن»¥çں¥éپ“ن؛†turtlesimو£ن»¥ه¤§ç؛¦60Hzçڑ„频çژ‡هڈ‘ه¸ƒوœ‰ه…³ن¹Œé¾ںçڑ„و•°وچ®م€‚وˆ‘ن»¬ن¹ںهڈ¯ن»¥ç»“هگˆrostopic
typeه’Œrosmsg showه‘½ن»¤و¥èژ·هڈ–ه…³ن؛ژوںگن¸ھè¯é¢کçڑ„و›´و·±ه±‚و¬،ن؟،وپ¯ï¼ڑ
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œ
$
rostopic type /turtle1/cmd_vel | rosmsg
show |
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œ
$
rostopic type /turtle1/command_velocity
| rosmsg show |
هˆ°و¤وˆ‘ن»¬ه·²ç»ڈن½؟用rostopicè°ƒوں¥ن؛†è؟™ن؛›ن¸»é¢ک,وژ¥ن¸‹و¥ه°†ن½؟用هڈ¦ن¸€ن¸ھه·¥ه…·و¥وں¥çœ‹turtlesimهڈ‘ه¸ƒçڑ„و•°وچ®م€‚
5 ن½؟用rqt_plot
و³¨و„ڈï¼ڑه¦‚وœن½ ن½؟用çڑ„وک¯ROS electricوˆ–و—©وœں版وœ¬ï¼Œé‚£ن¹ˆrqtوک¯ن¸چهڈ¯ç”¨çڑ„,请ن½؟用rxgraphن»£و›؟م€‚
rqt_plotه‘½ن»¤هڈ¯ن»¥هœ¨و»ڑهٹ¨و—¶é—´ه›¾ن¸ٹوک¾ç¤؛هڈ‘ه¸ƒهˆ°وںگن¸ھè¯é¢کن¸ٹçڑ„و•°وچ®م€‚è؟™é‡Œوˆ‘ن»¬ه°†ن½؟用rqt_plotه‘½ن»¤و¥ç»کهˆ¶و£è¢«هڈ‘ه¸ƒهˆ°/turtle1/poseè¯é¢کن¸ٹçڑ„و•°وچ®م€‚首ه…ˆï¼Œهœ¨ن¸€ن¸ھو–°ç»ˆç«¯ن¸è¾“ه…¥ï¼ڑ
$
rosrun rqt_plot rqt_plot |
è؟™ن¼ڑه¼¹ه‡؛ن¸€ن¸ھو–°çھ—هڈ£ï¼Œهڈ¯ن»¥هœ¨ه·¦ن¸ٹ角çڑ„و–‡وœ¬و،†é‡Œé¢و·»هٹ ن»»ن½•وƒ³è¦پç»کهˆ¶çڑ„è¯é¢کم€‚هœ¨é‡Œé¢è¾“ه…¥/turtle1/pose/xهگژ,ن¹‹ه‰چن¸چ能وŒ‰ن¸‹çڑ„هٹ هڈ·وŒ‰é’®ه°†ن¼ڑهڈکن؛®م€‚وŒ‰ن¸€ن¸‹è¯¥وŒ‰é’®ï¼Œه¹¶ه¯¹/turtle1/pose/yé‡چه¤چ相هگŒçڑ„è؟‡ç¨‹م€‚çژ°هœ¨ن½ ن¼ڑهœ¨ه›¾ن¸çœ‹هˆ°turtleçڑ„x-yن½چç½®م€‚
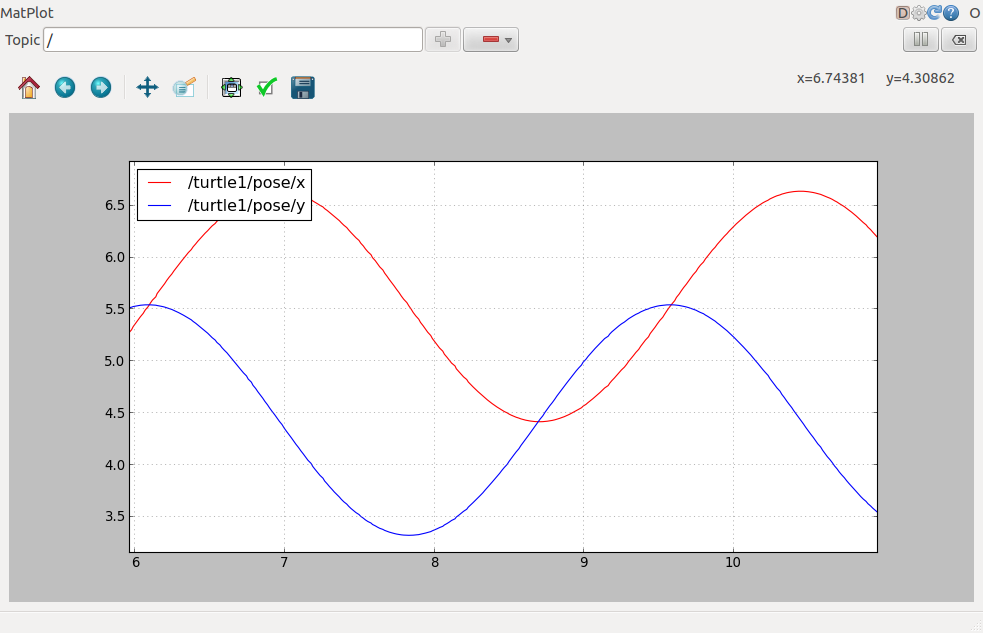
وŒ‰ن¸‹ه‡ڈهڈ·وŒ‰é’®ن¼ڑوک¾ç¤؛ن¸€ç»„èڈœهچ•هڈ¯ن»¥è®©ن½ هœ¨ه›¾ن¸éڑگè—ڈوŒ‡ه®ڑçڑ„è¯é¢کم€‚çژ°هœ¨éڑگè—ڈوژ‰ن½ هˆڑو‰چو·»هٹ çڑ„è¯é¢که¹¶و·»هٹ /turtle1/pose/theta,ن½ ن¼ڑ看هˆ°ه¦‚ن¸‹و‰€ç¤؛çڑ„ه›¾ï¼ڑ
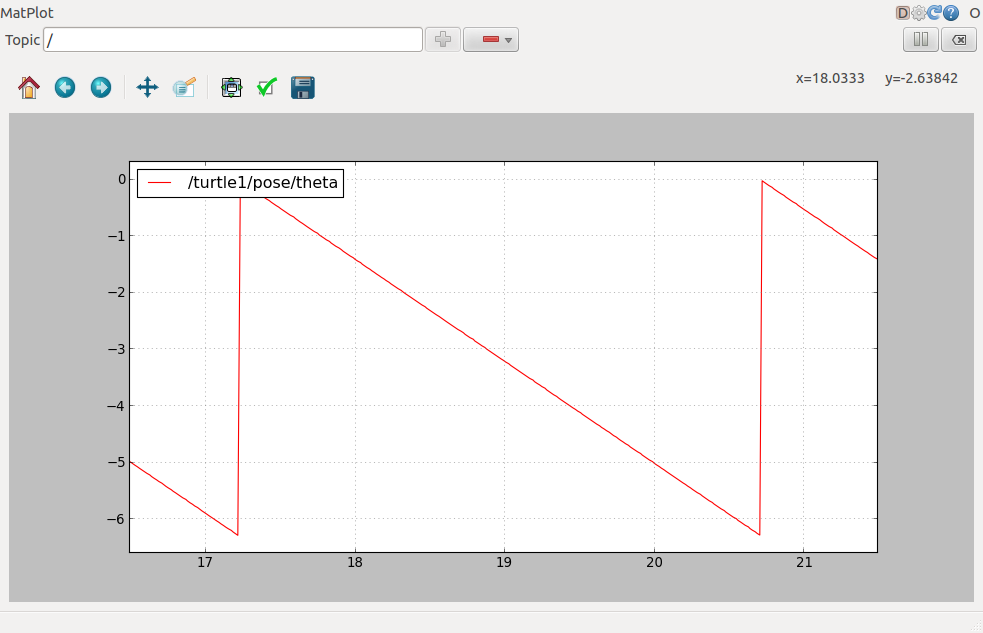
وœ¬éƒ¨هˆ†و•™ç¨‹هˆ°و¤ن¸؛و¢ï¼Œè¯·ن½؟用Ctrl+C退ه‡؛rostopicه‘½ن»¤ï¼Œن½†è¦پن؟وŒپturtlesim继ç»è؟گè،Œم€‚
هˆ°و¤وˆ‘ن»¬ه·²ç»ڈçگ†è§£ن؛†ROSè¯é¢کوک¯ه¦‚ن½•ه·¥ن½œçڑ„,وژ¥ن¸‹و¥وˆ‘ن»¬ه¼€ه§‹ه¦ن¹ çگ†è§£ROSوœچهٹ،ه’Œهڈ‚و•°م€‚
|








