Description: وœ¬و•™ç¨‹ن»‹ç»چهœ¨ROSن¸ن½؟用rqt_consoleه’Œrqt_logger_levelè؟›è،Œè°ƒè¯•ï¼Œن»¥هڈٹن½؟用roslaunchهگŒو—¶هگ¯هٹ¨ه¤ڑن¸ھèٹ‚点م€‚
Tutorial Level: BEGINNER
و³¨و„ڈï¼ڑه¦‚وœو‚¨ن½؟用çڑ„وک¯ROS fuerteوˆ–و—©وœں版وœ¬ï¼Œه®ƒن»¬çڑ„rqtه¹¶ن¸چه®Œه–„م€‚请هگŒو—¶هڈ‚考è؟™ن¸ھé،µé¢و¥ن½؟用و—§çڑ„هں؛ن؛ژrxçڑ„ه·¥ه…·م€‚
1 预ه¤‡ه·¥ن½œ
وœ¬و•™ç¨‹ن¼ڑ用هˆ°rqtه’Œturtlesimè؟™ن¸¤ن¸ھ软ن»¶هŒ…م€‚ه¦‚وœن½ هڈ‘çژ°و²،وœ‰ه®‰è£…,请ه…ˆï¼ڑ
$ sudo apt-get install ros-<distro>-rqt ros-<
distro>-rqt-common-plugins ros-<distro>-turtlesim
|
ه°†<distro>و›؟وچ¢وˆگن½ ه®‰è£…çڑ„ROSهڈ‘è،Œç‰ˆç®€ç§°ï¼ˆو¯”ه¦‚kineticوˆ–noeticç‰ï¼‰م€‚
و³¨و„ڈï¼ڑن½ هڈ¯èƒ½ه·²ç»ڈهœ¨ن¹‹ه‰چçڑ„وںگ篇و•™ç¨‹ن¸و„ه»؛è؟‡rqtه’Œturtlesimم€‚ن¸چè؟‡ه¦‚وœن¸چç،®ه®ڑçڑ„è¯ï¼Œه†چه®‰è£…ن¸€و¬،ن¹ںن¸چن¼ڑوœ‰ن»€ن¹ˆé—®é¢کم€‚
2 ن½؟用rqt_consoleه’Œrqt_logger_level
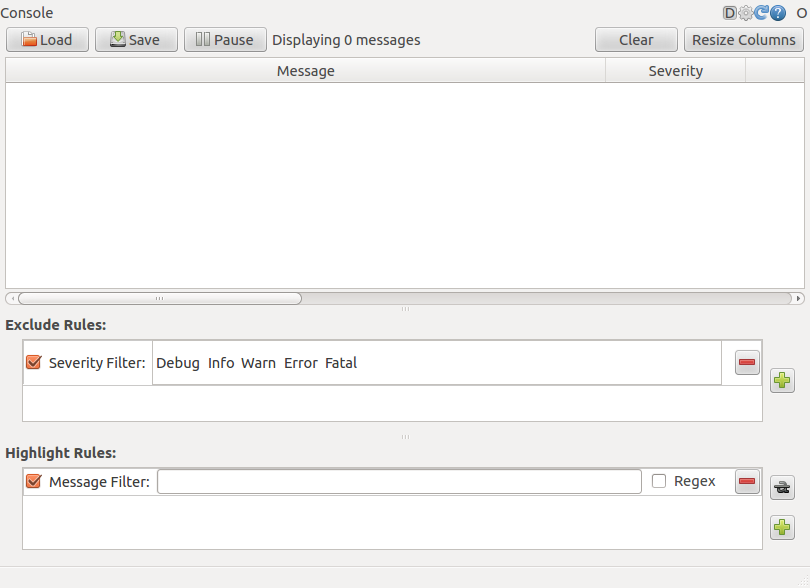
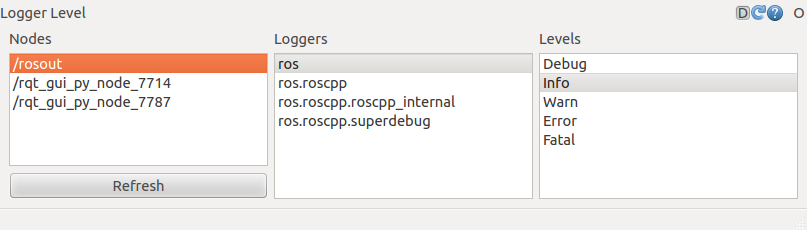
rqt_consoleè؟وژ¥هˆ°ن؛†ROSçڑ„و—¥ه؟—و،†و¶ï¼Œن»¥وک¾ç¤؛èٹ‚点çڑ„输ه‡؛ن؟،وپ¯م€‚rqt_logger_levelه…پ许وˆ‘ن»¬هœ¨èٹ‚点è؟گè،Œو—¶و”¹هڈک输ه‡؛ن؟،وپ¯çڑ„详细ç؛§هˆ«ï¼ŒهŒ…و‹¬Debugم€پInfoم€پWarnه’ŒError`م€‚
çژ°هœ¨è®©وˆ‘ن»¬و¥çœ‹ن¸€ن¸‹turtlesimهœ¨rqt_consoleن¸è¾“ه‡؛çڑ„ن؟،وپ¯ï¼ŒهگŒو—¶هœ¨ن½؟用turtlesimو—¶هˆ‡وچ¢rqt_logger_levelن¸çڑ„و—¥ه؟—ç؛§هˆ«م€‚هœ¨هگ¯هٹ¨turtlesimن¹‹ه‰چه…ˆهœ¨ن¸¤ن¸ھو–°ç»ˆç«¯ن¸è؟گè،Œrqt_consoleه’Œrqt_logger_levelï¼ڑ
$ rosrun rqt_console rqt_console
|
$ rosrun rqt_logger_level rqt_logger_level
|
ن½ ن¼ڑ看هˆ°ه¼¹ه‡؛ن¸¤ن¸ھçھ—هڈ£ï¼ڑ
çژ°هœ¨è®©وˆ‘ن»¬هœ¨هڈ¦ن¸€ن¸ھو–°ç»ˆç«¯ن¸هگ¯هٹ¨turtlesimï¼ڑ
$ rosrun turtlesim turtlesim_node
|
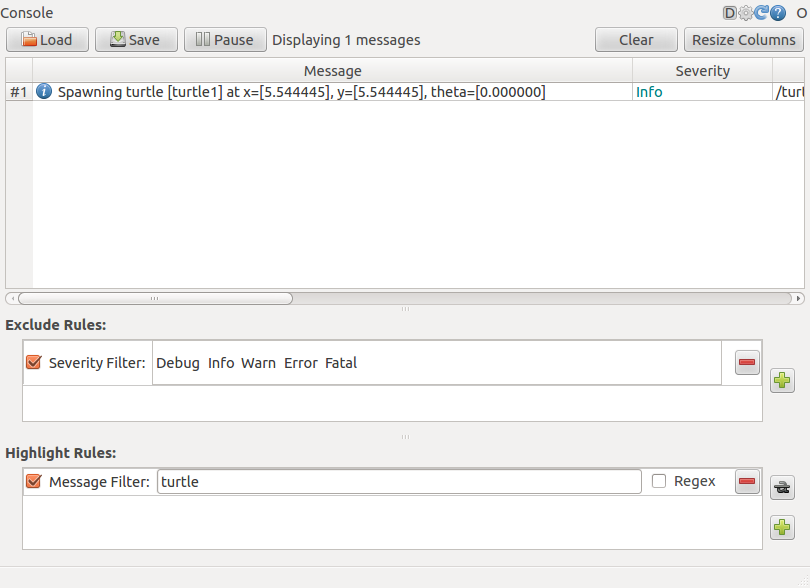
ه› ن¸؛é»ک认çڑ„و—¥ه؟—ç؛§هˆ«وک¯Info,و‰€ن»¥ن½ ن¼ڑ看هˆ°turtlesimهگ¯هٹ¨هگژهڈ‘ه¸ƒçڑ„و‰€وœ‰ن؟،وپ¯ï¼Œه¦‚ن¸‹ه›¾و‰€ç¤؛ï¼ڑ
çژ°هœ¨è®©وˆ‘ن»¬هœ¨rqt_logger_levelçھ—هڈ£ن¸هˆ·و–°ن¸€ن¸‹èٹ‚点ه¹¶é€‰و‹©Warnن»¥ن؟®و”¹و—¥ه؟—ç؛§هˆ«ï¼Œه¦‚ن¸‹ه›¾و‰€ç¤؛ï¼ڑ
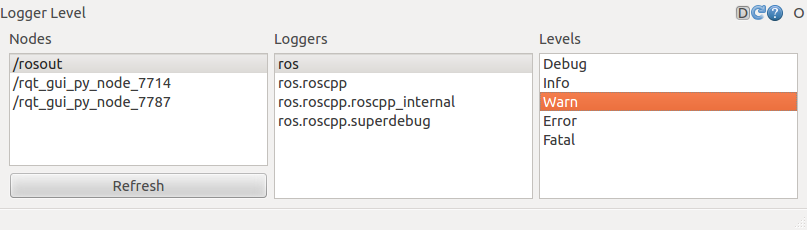
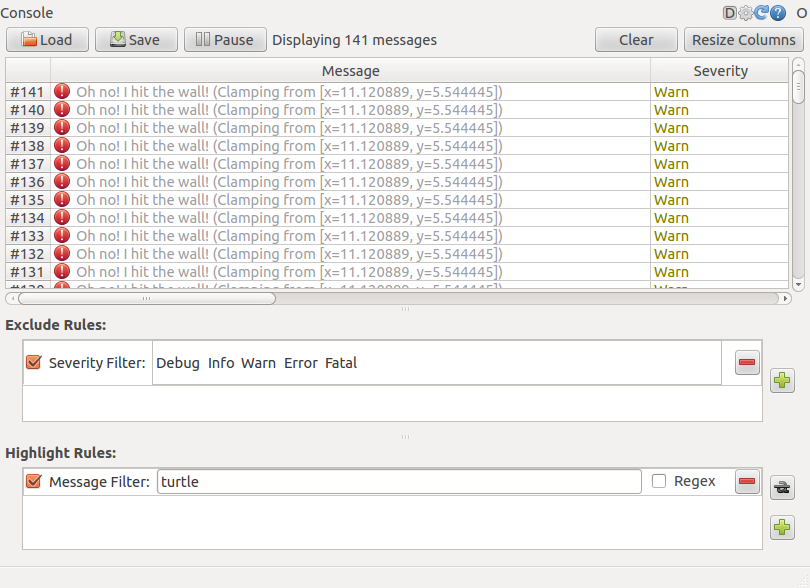
然هگژ让وˆ‘ن»¬وٹٹن¹Œé¾ںو’هˆ°ه¢™ن¸ٹ,看看rqt_consoleن¸ٹن¼ڑوک¾ç¤؛ن»€ن¹ˆï¼ڑ
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œ
rostopic pub /turtle1/cmd_vel geometry_msgs/
Twist -r 1 -- '{linear:
{x: 2.0, y: 0.0, z: 0.0},
angular: {x: 0.0,y: 0.0,z: 0.0}}'
|
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œ
rostopic pub /turtle1/command_
velocity turtlesim/Velocity -r 1 -- 2.0 0.0
|
2.1 و—¥ه؟—è®°ه½•ه™¨ç؛§هˆ«
و—¥ه؟—ç؛§هˆ«çڑ„ن¼که…ˆç؛§وŒ‰ن»¥ن¸‹é،؛ه؛ڈوژ’هˆ—ï¼ڑ
Fatal (致ه‘½ï¼‰
Error (错误)
Warn (è¦ه‘ٹ)
Info (ن؟،وپ¯ï¼‰
Debug (调试)
|
Fatalوک¯وœ€é«کن¼که…ˆç؛§ï¼ŒDebugوک¯وœ€ن½ژن¼که…ˆç؛§م€‚é€ڑè؟‡è®¾ç½®و—¥ه؟—ç؛§هˆ«ï¼Œن½ هڈ¯ن»¥èژ·ه¾—و‰€وœ‰ن¼که…ˆç؛§ç؛§هˆ«ï¼Œوˆ–هڈھوک¯و›´é«کç؛§هˆ«çڑ„و¶ˆوپ¯م€‚و¯”ه¦‚,ه°†و—¥ه؟—ç؛§هˆ«è®¾ن¸؛Warnو—¶ï¼Œن½ ن¼ڑه¾—هˆ°Warnم€پErrorه’ŒFatalè؟™ن¸‰ن¸ھç‰ç؛§çڑ„و—¥ه؟—و¶ˆوپ¯م€‚
çژ°هœ¨وŒ‰Ctrl+C退ه‡؛turtlesimèٹ‚点م€‚وژ¥ن¸‹و¥وˆ‘ن»¬ه°†ن½؟用roslaunchو¥هگ¯هٹ¨ه¤ڑن¸ھturtlesimèٹ‚点ه’Œن¸€ن¸ھو¨،ن»؟者èٹ‚点,و¥è®©ن¸€ن¸ھن¹Œé¾ںو¨،ن»؟هڈ¦ن¸€ن¸ھن¹Œé¾ںم€‚
2.2 ن½؟用roslaunch
roslaunchهڈ¯ن»¥ç”¨و¥هگ¯هٹ¨ه®ڑن¹‰هœ¨launch(هگ¯هٹ¨ï¼‰و–‡ن»¶ن¸çڑ„èٹ‚点م€‚
用و³•ï¼ڑ
$ roslaunch [package] [filename.launch]
|
ه…ˆهˆ‡وچ¢هˆ°وˆ‘ن»¬ن¹‹ه‰چهˆ›ه»؛ه’Œو„ه»؛çڑ„beginner_tutorials软ن»¶هŒ…ç›®ه½•ن¸‹ï¼ڑ
$ roscd beginner_tutorials
|
ه¦‚وœroscdوڈگç¤؛ç±»ن¼¼ن؛ژroscd: No such package/stack 'beginner_tutorials'çڑ„è¯ï¼Œن½ 需è¦پوŒ‰ç…§هˆ›ه»؛catkinه·¥ن½œç©؛é—´هگژé¢çڑ„و¥éھ¤ن½؟çژ¯ه¢ƒهڈکé‡ڈç”ںو•ˆï¼ڑ
$ cd ~/catkin_ws
$ source devel/setup.bash
$ roscd beginner_tutorials
|
然هگژهˆ›ه»؛ن¸€ن¸ھlaunchç›®ه½•ï¼ڑ
$ mkdir launch
$ cd launch
|
و³¨و„ڈï¼ڑهکو”¾launchو–‡ن»¶çڑ„ç›®ه½•ن¸چن¸€ه®ڑéè¦په‘½هگچن¸؛launch,ن؛‹ه®ن¸ٹ都ن¸چ用éه¾—و”¾هœ¨ç›®ه½•ن¸ï¼Œroslaunchه‘½ن»¤ن¼ڑè‡ھهٹ¨وں¥و‰¾ç»ڈè؟‡çڑ„هŒ…ه¹¶و£€وµ‹هڈ¯ç”¨çڑ„هگ¯هٹ¨و–‡ن»¶م€‚然而,è؟™ç§چوژ¨èچگçڑ„و ‡ه‡†هپڑو³•è¢«è®¤ن¸؛وک¯â€œوœ€ن½³ه®è·µâ€م€‚
2.3 launchو–‡ن»¶
çژ°هœ¨ن¸€èµ·هˆ›ه»؛ن¸€ن¸ھهگچن¸؛turtlemimic.launchçڑ„launchو–‡ن»¶ه¹¶ه¤چهˆ¶ç²کè´´ن»¥ن¸‹ه†…ه®¹è؟›هژ»ï¼ڑ
1 <launch>
2
3 <group ns="turtlesim1">
4 <node pkg="turtlesim"
name="sim" type="turtlesim_node"/>
5 </group>
6
7 <group ns="turtlesim2">
8 <node pkg="turtlesim"
name="sim" type="turtlesim_node"/>
9 </group>
10
11 <node pkg="turtlesim"
name="mimic" type="mimic">
12 <remap from="input"
to="turtlesim1/turtle1"/>
13 <remap from="output"
to="turtlesim2/turtle1"/>
14 </node>
15
16 </launch>
|
2.4
launch解وگ
ن¸‹é¢وˆ‘ن»¬ه¼€ه§‹و‹†è§£launch XMLو–‡ن»¶م€‚
首ه…ˆç”¨launchو ‡ç¾ه¼€ه¤´ï¼Œن»¥è،¨وکژè؟™وک¯ن¸€ن¸ھlaunchو–‡ن»¶م€‚
3 <group ns="turtlesim1">
4 <node pkg="turtlesim"
name="sim" type="turtlesim_node"/>
5 </group>
6
7 <group ns="turtlesim2">
8 <node pkg="turtlesim"
name="sim" type="turtlesim_node"/>
9 </group>
|
و¤ه¤„وˆ‘ن»¬هˆ›ه»؛ن؛†ن¸¤ن¸ھهˆ†ç»„,ه¹¶ن»¥ه‘½هگچç©؛间(namespace)و ‡ç¾و¥هŒ؛هˆ†ï¼Œه…¶ن¸ن¸€ن¸ھهگچن¸؛turtulesim1,هڈ¦ن¸€ن¸ھهگچن¸؛turtlesim2,ن¸¤ن¸ھهˆ†ç»„ن¸éƒ½وœ‰ç›¸هگŒçڑ„هگچن¸؛simçڑ„turtlesimèٹ‚点م€‚è؟™و ·هڈ¯ن»¥è®©وˆ‘ن»¬هگŒو—¶هگ¯هٹ¨ن¸¤ن¸ھturtlesimو¨،و‹ںه™¨ï¼Œè€Œن¸چن¼ڑن؛§ç”ںه‘½هگچه†²çھپم€‚
11 <node pkg="turtlesim"
name="mimic" type="mimic">
12 <remap from="input"
to="turtlesim1/turtle1"/>
13 <remap from="output"
to="turtlesim2/turtle1"/>
14 </node>
|
هœ¨è؟™é‡Œوˆ‘ن»¬هگ¯هٹ¨و¨،ن»؟èٹ‚点,è¯é¢کçڑ„输ه…¥ه’Œè¾“ه‡؛هˆ†هˆ«é‡چه‘½هگچن¸؛turtlesim1ه’Œturtlesim2,è؟™و ·ه°±هڈ¯ن»¥è®©turtlesim2و¨،ن»؟turtlesim1ن؛†م€‚
è؟™ن¸€è،Œن½؟ه¾—launchو–‡ن»¶çڑ„XMLو ‡ç¾é—هگˆم€‚
2.5 ن½؟用roslaunch
çژ°هœ¨è®©وˆ‘ن»¬é€ڑè؟‡roslaunchه‘½ن»¤و¥è؟گè،Œlaunchو–‡ن»¶ï¼ڑ
$ roslaunch beginner_tutorials turtlemimic.launch
|
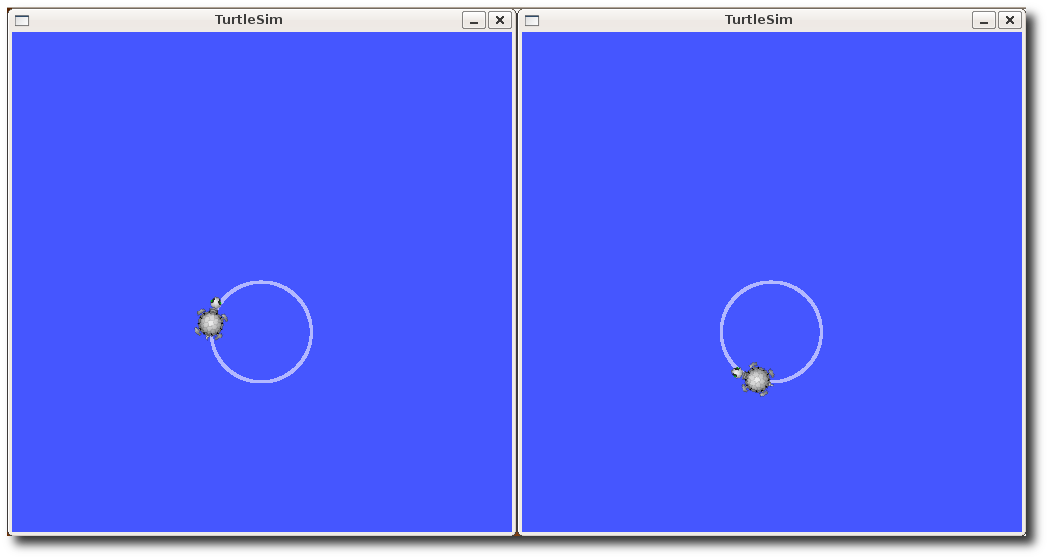
çژ°هœ¨ه°†ن¼ڑوœ‰ن¸¤ن¸ھturtlesim被هگ¯هٹ¨ï¼Œç„¶هگژوˆ‘ن»¬هœ¨ن¸€ن¸ھو–°ç»ˆç«¯ن¸ن½؟用rostopicه‘½ن»¤هڈ‘é€پï¼ڑ
هœ¨ROS Hydroهڈٹو›´و–°ç‰ˆوœ¬ن¸ï¼Œ
$ rostopic pub /turtlesim1/turtle1/cmd_vel
geometry_msgs/Twist -r 1 -- '
[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
|
هœ¨ROS Groovyهڈٹو—©وœں版وœ¬ن¸ï¼Œ
$ rostopic pub /turtlesim1/turtle1/command_
velocity turtlesim/Velocity -r 1 -- 2.0 -1.8
|
ن½ ن¼ڑ看هˆ°ن¸¤ن¸ھturtlesimsهگŒو—¶ه¼€ه§‹ç§»هٹ¨ï¼Œè™½ç„¶هڈ‘ه¸ƒه‘½ن»¤هڈھهڈ‘é€پç»™ن؛†turtlesim1م€‚
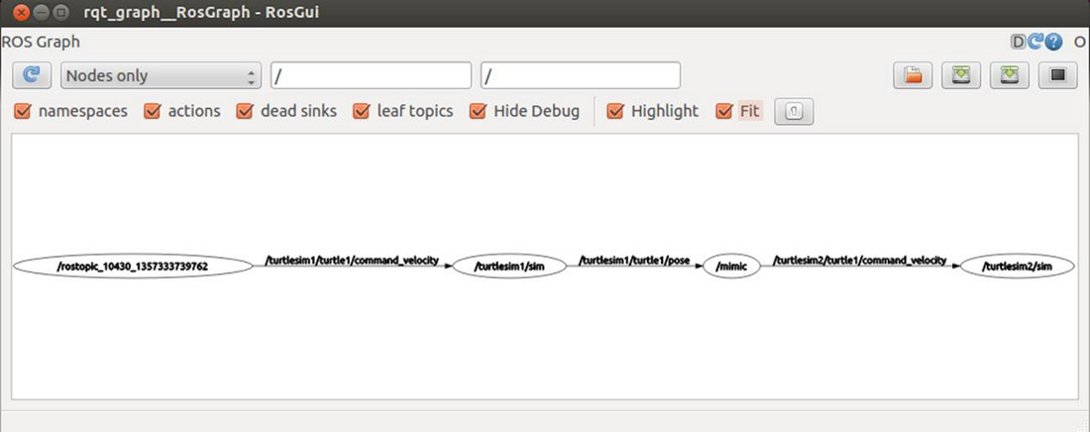
وˆ‘ن»¬è؟کهڈ¯ن»¥ç”¨rqt_graphو¥و›´ه¥½هœ°çگ†è§£launchو–‡ن»¶و‰€هپڑçڑ„ن؛‹وƒ…م€‚è؟گè،Œrqtه¹¶هœ¨ن¸»çھ—هڈ£ن¸é€‰و‹©Plugins
> Introspection > Node Graphï¼ڑ
وˆ–者直وژ¥è؟گè،Œï¼ڑ
هˆ°و¤ï¼Œوˆ‘ن»¬ç®—وک¯ه·²ç»ڈه¦ن¼ڑن؛†rqt_consoleه’Œroslaunchه‘½ن»¤çڑ„ن½؟用,وژ¥ن¸‹و¥وˆ‘ن»¬ه¼€ه§‹ه¦ن¹ ن½؟用rosedن؛†è§£ROSçڑ„编辑ه™¨é€‰و‹©م€‚çژ°هœ¨ن½ هڈ¯ن»¥وŒ‰Ctrl+C退ه‡؛و‰€وœ‰turtlesimsèٹ‚点ن؛†ï¼Œه› ن¸؛هœ¨وژ¥ن¸‹و¥çڑ„و•™ç¨‹ن¸ن½ ن¸چن¼ڑه†چ用هˆ°ه®ƒن»¬م€‚
|








