| еҰӮдҪ•еҗҜеҠЁе Ҷж Ҳ
жҢүз…§SVL д»ҝзңҹеҷЁ дёӯзҡ„иҜҙжҳҺејҖе§Ӣд»ҝзңҹ гҖӮ жӯӨеӨ–пјҢиҰҒдёәжӯӨжј”зӨәй…ҚзҪ® LGSVLпјҡ
- ең°еӣҫпјҡдҪҝз”ЁжӯӨ ең°еӣҫй“ҫжҺҘ
- иҪҰиҫҶпјҡйҖүжӢ© ROS2 native жЎҘжўҒзұ»еһӢ并е°ҶеҶ…е®№зІҳиҙҙ AutowareAuto/src/launch /autoware_demos /config/svl /avp-sensors.json еҲ° Sensors ж–Үжң¬жЎҶдёӯ
- д»ҝзңҹпјҡеңЁ General йҖүйЎ№еҚЎдёӯпјҢ Select Cluster = Local Machine 并еҸ–ж¶ҲйҖүдёӯд»»дҪ•жЎҶгҖӮ еңЁ Map & Vehicles йҖүйЎ№еҚЎдёӯпјҢзЎ®дҝқеҸ–ж¶ҲеӢҫйҖү Run simulation in interactive mode гҖӮ еңЁ Traffic йҖүйЎ№еҚЎдёӯпјҢеҸ–ж¶ҲйҖүдёӯжүҖжңүйҖүжӢ©гҖӮ йҖүйЎ№еҚЎ Weather ж— е…ізҙ§иҰҒгҖӮ
1еҸ·иҲӘз«ҷжҘј
# жҢүз…§дёҠйқўзҡ„иҜҙжҳҺеҗҜеҠЁ sim дҪҶдёҚиҰҒејҖиҪҰзҰ»ејҖд»ҘзЎ®дҝқжҲ‘们еҸҜд»Ҙе®ҡдҪҚиҮӘе·ұ
# 然еҗҺеҗҜеҠЁ RViz2 иҝӣиЎҢеҸҜи§ҶеҢ–
> ade иҝӣе…Ҙ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 еҗҜеҠЁ autoware_auto_launch autoware_auto_visualization.launch.py |
2еҸ·иҲӘз«ҷжҘј
> ade иҝӣе…Ҙ
ade$ source /opt/AutowareAuto/setup.bash
ade$ stdbuf -o L ros2 еҗҜеҠЁ autoware_demos avp_sim.launch.py |
йңҖиҰҒдёҠйқўзҡ„е‘Ҫд»ӨпјҢеӣ дёә ROS дёӯзҡ„й»ҳи®Өи®ҫзҪ®жҳҜд»… еңЁзј“еҶІеҢәе·Іж»Ўж—¶ stdbuf иҫ“еҮәиЎҢгҖӮ stdout жӯӨе‘Ҫд»Өжӣҙж”№иҜҘи®ҫзҪ®д»ҘдҪҝз”Ёиҫ“еҮәжҜҸдёҖиЎҢзҡ„вҖңиЎҢзј“еҶІеҢәвҖқпјҢжҸҗдҫӣжӣҙеӨҡи°ғиҜ•дҝЎжҒҜгҖӮ
3еҸ·иҲӘз«ҷжҘј
> ade иҝӣе…Ҙ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 дё»йўҳ echo /planning/global_path |
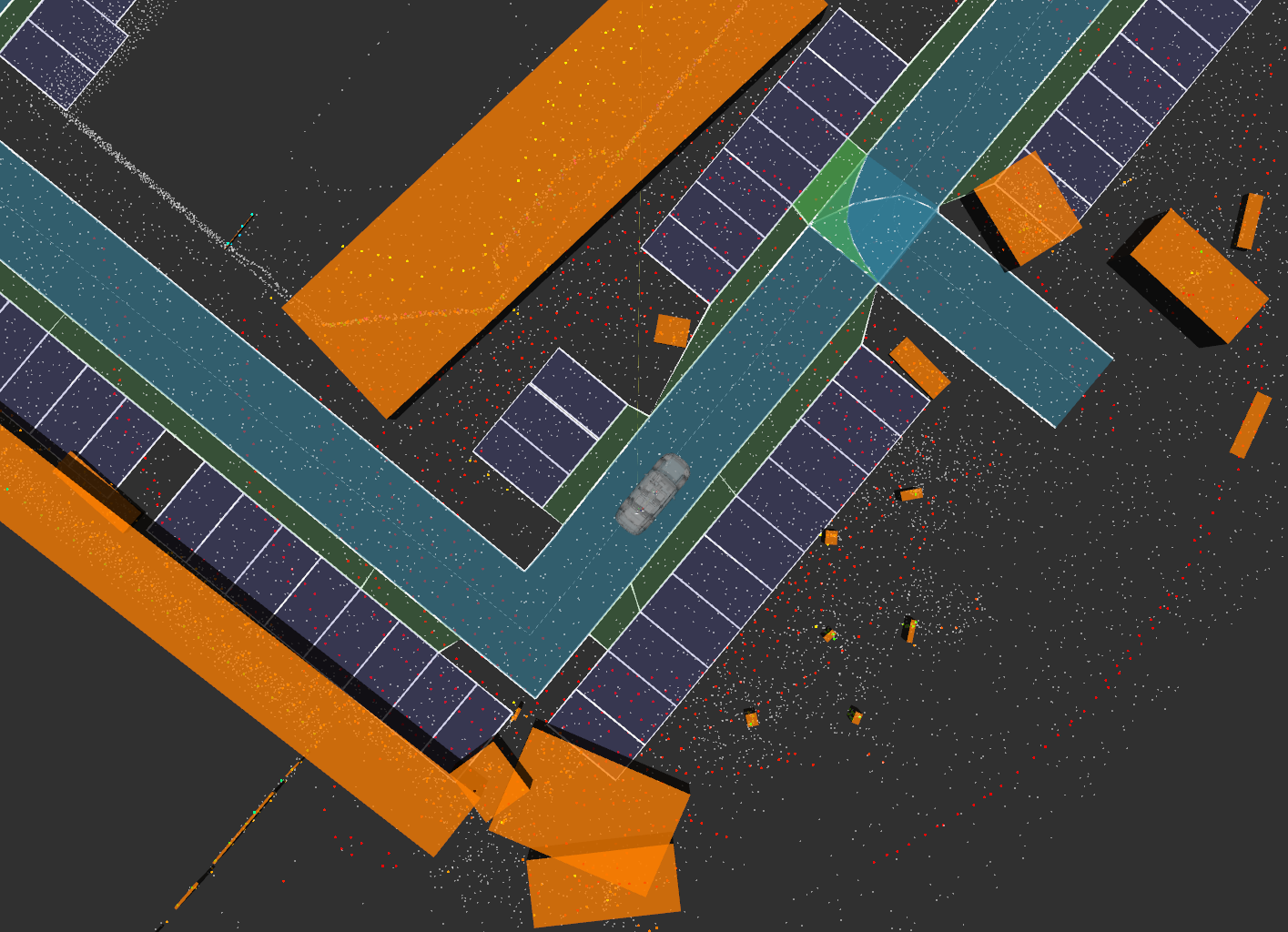
е°Ҷ LGSVL дёҠзҡ„иҪҰиҫҶ移еҠЁеҲ°еӣҫдёӯжүҖзӨәзҡ„дҪҚзҪ®гҖӮ иҝҷжҳҜ AutonomouStuff еӨ§жҘјеүҚй—ЁеӨ–дёүдёӘеҒңиҪҰдҪҚеүҚеҒңиҪҰеңәйҒ“и·ҜдёҠзҡ„вҖңжҺҘйҖҒеҢәвҖқгҖӮ
ејҖе§Ӣе§ҝеҠҝ
еңЁйҖүжӢ©зӣ®ж Үд№ӢеүҚпјҢжӮЁйңҖиҰҒеҲқе§ӢеҢ–жң¬ең°еҢ–гҖӮ иҰҒеҲҮжҚўеҲ° rviz зӘ—еҸЈпјҢиҜ·еҚ•еҮ» 2D Pose Estimate йЎ¶йғЁзҡ„жҢүй’®пјҢ然еҗҺеҚ•еҮ»иҪҰиҫҶеҪ“еүҚеңЁең°еӣҫдёӯзҡ„еӨ§иҮҙдҪҚзҪ®е№¶жІҝиҪҰиҫҶеүҚиҝӣж–№еҗ‘жӢ–еҠЁгҖӮ жӮЁеҸҜд»ҘйҖҡиҝҮи·іиҪ¬еҲ°ж–°дҪҚзҪ®зҡ„иҪҰиҫҶжЁЎеһӢд»ҘеҸҠдёҺйқҷжҖҒжҝҖе…үйӣ·иҫҫең°еӣҫеҢ№й…Қзҡ„е®һж—¶жҝҖе…үйӣ·иҫҫжү«жҸҸжқҘйӘҢиҜҒиҪҰиҫҶжҳҜеҗҰе·Іе®ҡдҪҚгҖӮ
жҺҘдёӢжқҘпјҢиҰҒд»ҘеӣҫеҪўж–№ејҸйҖүжӢ©еҒңиҪҰдҪҚпјҢиҜ·еҚ•еҮ» дёӯзҡ„ 2D Nav Goal жҢүй’® rviz пјҢеҚ•еҮ»зӣ®ж ҮдҪҚзҪ®пјҢ然еҗҺжІҝзӣ®ж ҮиҲӘеҗ‘ж–№еҗ‘жӢ–еҠЁгҖӮ
пјҲеҸҜйҖүпјүд»Ҙзј–зЁӢж–№ејҸеҸ‘йҖҒзӣ®ж ҮдҪҚзҪ®/ж Үйўҳпјҡ
4еҸ·иҲӘз«ҷжҘј
> ade иҝӣе…Ҙ
ade$ ros2 topic pub --once /planning/goal_pose geometry_msgs/msg/PoseStamped "{
ж Үйўҳпјҡ
{йӮ®зҘЁпјҡ
{з§’пјҡ1600775035пјҢ
зәіз§’пјҡ496432027}пјҢ
frame_id: ең°еӣҫ},
е§ҝеҠҝпјҡ
{дҪҚзҪ®пјҡ
{xпјҡ-77.87589263916016пјҢ
жҳҜпјҡ-18.580652236938477пјҢ
дёҺпјҡ0.0}пјҢ
ж–№еҗ‘пјҡ
{x: 0.0,
y: 0.0,
дёҺпјҡ0.14149930538744868пјҢ
еңЁпјҡ0.9899383549367453}}}
" |
еёҰжңүиҪҰйҒ“ ID зҡ„и·Ҝеҫ„еә”еңЁ з»Ҳз«Ҝ 3 дёӯиҫ“еҮәгҖӮ
жіЁж„Ҹ иҰҒйҖүжӢ©дёҚеҗҢзҡ„еҒңиҪҰдҪҚпјҢиҜ·еҚ•еҮ» 2D Nav Goal 并 rviz 收еҗ¬ж¶ҲжҒҜ
ros2 дё»йўҳеӣһеЈ° /goal_pose
并д»ҘдёҠиҝ° YAML ж јејҸжӣҙж–°ж¶ҲжҒҜдёӯзҡ„еҖјгҖӮ
дј йҖ’жҢҮж Ү
иҫ“еҮәж¶ҲжҒҜзңӢиө·жқҘеғҸ
...
еҺҹиҜӯпјҡ
- зј–еҸ·пјҡ8252
еҺҹе§Ӣзұ»еһӢпјҡеҒңиҪҰеңә
- зј–еҸ·пјҡ9074
еҺҹе§Ӣзұ»еһӢпјҡеҸҜй©ұеҠЁеҢәеҹҹ
- зј–еҸ·пјҡ6581
еҺҹе§Ӣзұ»еһӢпјҡиҪҰйҒ“
# еҫҲеӨҡиҪҰйҒ“иў«зңҒз•Ҙ
- зј–еҸ·пјҡ6700
еҺҹе§Ӣзұ»еһӢпјҡиҪҰйҒ“
- зј–еҸ·пјҡ7957
еҺҹе§Ӣзұ»еһӢпјҡеҸҜй©ұеҠЁеҢәеҹҹ
- зј–еҸ·пјҡ9824
еҺҹе§Ӣзұ»еһӢпјҡеҒңиҪҰеңә |
иҰҒжЈҖжҹҘи·ҜзәҝжҳҜеҗҰеҗҲзҗҶпјҢиҜ· AutowareAuto/src/ launch / autoware_demos / data / autonomousstuff_parking_lot.osm еңЁж–Үжң¬зј–иҫ‘еҷЁдёӯжү“ејҖ OSM ең°еӣҫ并жҗңзҙў way id='9824 . 9831 еңЁиҝҷз§Қжғ…еҶөдёӢ пјҢе®ғеј•з”ЁдәҶдёҖдёӘиҠӮзӮ№пјҢеҚіе…ҘеҸЈзәҝзҡ„дёӯеҝғгҖӮ жҗңзҙўе®ғзҡ„еқҗж ҮпјҢе®ғ们жҳҜпјҡ
...
еҺҹиҜӯпјҡ
- зј–еҸ·пјҡ8252
еҺҹе§Ӣзұ»еһӢпјҡеҒңиҪҰеңә
- зј–еҸ·пјҡ9074
еҺҹе§Ӣзұ»еһӢпјҡеҸҜй©ұеҠЁеҢәеҹҹ
- зј–еҸ·пјҡ6581
еҺҹе§Ӣзұ»еһӢпјҡиҪҰйҒ“
# еҫҲеӨҡиҪҰйҒ“иў«зңҒз•Ҙ
- зј–еҸ·пјҡ6700
еҺҹе§Ӣзұ»еһӢпјҡиҪҰйҒ“
- зј–еҸ·пјҡ7957
еҺҹе§Ӣзұ»еһӢпјҡеҸҜй©ұеҠЁеҢәеҹҹ
- зј–еҸ·пјҡ9824
еҺҹе§Ӣзұ»еһӢпјҡеҒңиҪҰеңә |
иҰҒд»ҘеӣҫеҪўж–№ејҸжЈҖжҹҘиҝҷдёҖзӮ№пјҢиҜ· qgis дҪҝз”Ёд»ҘдёӢе‘Ҫд»Өе®үиЈ…иҜҘе·Ҙе…·пјҡ
| <иҠӮзӮ№ id = '9831' еҸҜи§Ғ= 'true' зүҲжң¬= '1' lat = '37.38065126054' lon = '-121.90931385745' > |
并жҢүз…§ жң¬ж•ҷзЁӢ жү“ејҖ .osm ж–Ү件гҖӮ жңҖеҗҺпјҢе®үиЈ…дёҖдёӘеҗҚдёә Lat Lon Tools 并иҫ“е…Ҙеқҗж Үд»Ҙз”ЁзәўиүІеҚҒеӯ—еҮҶзәҝзІҫзЎ®е®ҡдҪҚиҠӮзӮ№зҡ„жҸ’件гҖӮ
| <иҠӮзӮ№ id = '9831' еҸҜи§Ғ= 'true' зүҲжң¬= '1' lat = '37.38065126054' lon = '-121.90931385745' > |
|








