هںںوڈڈè؟°
该 common هگç›®ه½•هŒ…هگ«èٹ‚点ه’Œه؛“,ه…¶هٹں能由 Autoware.Auto ç³»ç»ںن¸çڑ„许ه¤ڑهŒ…ه…±ن؛«م€‚ ن¸ه؟ƒé،µé¢
autoware_auto_tf2
è؟™وک¯ autoware_auto_tf2 هŒ…装çڑ„设è®،و–‡ن»¶م€‚
ç›®çڑ„/用ن¾‹
é€ڑه¸¸ï¼ŒROS çڑ„用وˆ·ن¾èµ– tf(هڈٹه…¶هگژ继者 tf2 )و¥هڈ‘ه¸ƒه’Œن½؟用هگو ‡ç³»هڈکوچ¢م€‚ هچ³ن½؟هœ¨ tf2 هŒ…هگ«هŒ… tf2_geometry_msgs ه¹¶ن¸” tf2_sensor_msgs ه…پ许هœ¨ geometry_msgs ه’Œ sensor_msgs ن¸ه®ڑن¹‰çڑ„و¶ˆوپ¯ç±»ه‹ن¹‹é—´è½»و¾è½¬وچ¢çڑ„وƒ…ه†µن¸‹ن¹ںوک¯ه¦‚و¤م€‚ ن½†وک¯ï¼ŒAutowareAuto هŒ…هگ«ن¸€ن؛›ç‰¹و®ٹçڑ„و¶ˆوپ¯ç±»ه‹ï¼Œè؟™ن؛›و¶ˆوپ¯ç±»ه‹ن¸چ能ن½؟用 ROS2 ه؛“هœ¨ه¸§ن¹‹é—´è؟›è،Œè½¬وچ¢م€‚ 该 autoware_auto_tf2 软ن»¶هŒ…و—¨هœ¨ن¸؛ه¼€هڈ‘ن؛؛ه‘کوڈگن¾›è½¬وچ¢é€‚用 autoware_auto_geometry_msgs ه’Œ autoware_auto_perception_msgs ç±»ه‹çڑ„ه·¥ه…·م€‚ 除و¤ن¹‹ه¤–,该هŒ…è؟ک geometry_msgs ن¸؛ tf2_geometry_msgs .
设è®،
هœ¨ç¼–ه†™ tf2_some_msgs وˆ–è´،献و—¶ï¼Œçژ°وœ‰ tf2 و،†و¶ tf2_geometry_msgs ن¸çڑ„ن»¥ن¸‹و–‡ن»¶ç،®ن؟ن؛†ه…¼ه®¹و€§ه’Œè®¾è®،و„ڈه›¾ï¼ڑ
- tf2/convert.h
- tf2_ros/buffer_interface.h
ن¾‹ه¦‚ï¼ڑ
| void tf2::convert(const A & a,B & b) |
该و–¹و³• tf2::convert هڈ–ه†³ن؛ژن»¥ن¸‹ه†…ه®¹ï¼ڑ
و¨،و؟<ç±»ه‹هگچ A,类ه‹هگچ B>
B tf2::toMsg(const A&a);
و¨،و؟<ç±»ه‹هگچ A,类ه‹هگچ B>
و— و•ˆ tf2::fromMsg(const A&, B& b);
// و–°çڑ„转وچ¢و–¹ه¼ڈ,而ن¸چوک¯ç›´وژ¥ن½؟用 tf2::doTransform()
tf2_ros::BufferInterface::transform(...) |
هڈچè؟‡و¥ï¼Œè؟™هڈ–ه†³ن؛ژن»¥ن¸‹ه†…ه®¹ï¼ڑ
void tf2::convert(const A & a,B & b)
const std::string& tf2::getFrameId(const T& t)
const ros::Time& tf2::getTimestamp(const T& t); |
tf2_geometry_msgs çڑ„ه½“ه‰چه®çژ°
هœ¨ ROS1 ه’Œ ROS2 و ‡è®°çڑ„و¶ˆوپ¯ن¸ï¼Œه¦‚ Vector3Stamped , QuaternionStamped ه…·وœ‰ç›¸ه…³çڑ„هٹں能,ه¦‚ï¼ڑ
- getTimestamp
- getFrameId
- doTransform
- toMsg
- fromMsg
هœ¨ ROS1 ن¸ï¼Œن¸؛ن؛†و”¯وŒپ tf2::convert ه’Œéœ€è¦پ doTransform 被و ‡è®°çڑ„و•°وچ®ï¼Œéو ‡è®°çڑ„ه؛•ه±‚و•°وچ®ï¼Œه¦‚ Vector3 , Point ,ه…·وœ‰ن»¥ن¸‹هٹں能çڑ„ه®çژ°ï¼ڑ
هœ¨ ROS2 ن¸ï¼Œه¤§éƒ¨هˆ† doTransform و–¹و³•éƒ½و²،وœ‰ن½؟用 toMsg ,ه¹¶ن¸”و²،وœ‰ن½؟用و¥è‡ھ tf2 fromMsg çڑ„و•°وچ®ç±»ه‹ م€‚ 而وک¯ ن½؟用 ه®Œوˆگ ,ه› و¤وœھو·»هٹ ن¸ژهں؛ç،€و•°وچ®ç›¸ه…³çڑ„ه‡½و•°ï¼› ن¾‹ه¦‚ , , وˆ–移و¤چهˆ°è؟™ن¸ھوڈگن؛¤ ros/geometry2/commit/6f2a82 ن¸م€‚ ه¸¦وœ‰ه’Œ çڑ„éو ‡è®°و•°وچ® وک¯ , م€‚ ه·²ن؟®و”¹ ن¸”وœھ被 . doTransform KDL Vector3 Point toMsg fromMsg Quaternion Transform Pose toMsg PoseStamped
è®،هˆ’ autoware_auto_perception_msgs::msg::BoundingBoxArray
وœ€هˆ çڑ„ ç²—ç•¥ è®،هˆ’ toMsg وک¯ و ¹وچ® fromMsg . و•°وچ®ç±»ه‹çڑ„ç¤؛ن¾‹هŒ…و‹¬ï¼ڑ م€پ ه’Œ م€‚ و¤ه¤–,ه؛”该è؟›è،Œه®و–½ï¼Œن»¥ن¾؟ن¸ٹو¸¸è´،献ن¹ںهڈ¯ن»¥ه¯¹ . doTransform BoundingBoxArray BoundingBox Quaternion32 Point32 geometry_msgs
هپ‡è®¾/ه·²çں¥é™گهˆ¶
ç”±ن؛ژه‡½و•°ç¾هگچن¸çڑ„ه†²çھپ, ن¸چéپµه¾ھ convert.h /çڑ„预ه®ڑن¹‰و¨،و؟,ه¹¶ن¸”ه…¼ه®¹و€§ è¢«ç ´هڈه¹¶ن¸” ç¼–ه†™و–¹ه¼ڈن¸چهگŒم€‚ transform_functions.h tf2::convert(..) toMsg
// è€په¼ڈ
geometry_msgs::Vector3 toMsg(const tf2::Vector3& in)
geometry_msgs::Point& toMsg(const tf2::Vector3& in)
// و–°é£ژو ¼
geometry_msgs::Point& toMsg(const tf2::Vector3& in, geometry_msgs::Point& out) |
输ه…¥/输ه‡؛/API
该ه؛“ن¸؛ doTransform ن»¥ن¸‹و•°وچ®ç±»ه‹وڈگن¾› API,è؟™ن؛›و•°وچ®ç±»ه‹è¦پن¹ˆهœ¨ه…¶ن¸ن¸چهڈ¯ç”¨ï¼Œ tf2_geometry_msgs è¦پن¹ˆو¶ˆوپ¯ç±»ه‹وک¯ه…¶ن¸çڑ„ن¸€éƒ¨هˆ†ï¼Œ autoware_auto_geometry_msgs ه› و¤ autoware_auto_perception_msgs وک¯è‡ھه®ڑن¹‰çڑ„,ه¹¶ن¸”ن¸چهڈ—ن»»ن½• tf2 ه؛“çڑ„ه›؛وœ‰و”¯وŒپم€‚ ن¸؛ن»¥ن¸‹و•°وچ®ç±»ه‹وڈگن¾›ن؛†ن»¥ن¸‹ APIï¼ڑ
- Point32
- ه†…èپ”و— و•ˆdoTransform( const geometry_msgs::msg::Point32 & t_in, geometry_msgs::msg::Point32 & t_out, const geometry_msgs::msg::TransformStamped & transform)
- Quarternion32 ( autoware_auto_geometry_msgs )
- ه†…èپ”و— و•ˆdoTransform( ه¸¸é‡ڈ autoware_auto_geometry_msgs::msg::Quaternion32 & t_in, autoware_auto_geometry_msgs::msg::Quaternion32 & t_out, const geometry_msgs::msg::TransformStamped & transform)
- BoundingBox ( autoware_auto_perception_msgs )
- ه†…èپ”و— و•ˆdoTransform( const BoundingBox & t_in, BoundingBox & t_out, const geometry_msgs::msg::TransformStamped & transform)
- BoundingBoxArray
- ه†…èپ”و— و•ˆdoTransform( const BoundingBoxArray & t_in, BoundingBoxArray & t_out, const geometry_msgs::msg::TransformStamped & transform)
و¤ه¤–,è؟کو·»هٹ ن؛†ن»¥ن¸‹è¾…هٹ©و–¹و³•ï¼ڑ
- BoundingBoxArray
- ه†…èپ” tf2::TimePoint getTimestamp(const BoundingBoxArray & t)
- ه†…èپ” std::string getFrameId(const BoundingBoxArray & t)
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
وŒ‘وˆک
- tf2_geometry_msgs ن¸چ doTransform ن¸؛ن»»ن½•éو ‡è®°و•°وچ®ç±»ه‹ه®çژ°ï¼Œن½†هڈ¯ن»¥ن½؟用相هگŒçڑ„ه‡½و•°و¨،و؟م€‚ 转وچ¢هگو•°وچ®و—¶éœ€è¦په®ƒï¼Œن¸»و•°وچ®ç،®ه®وœ‰و ‡è®°ï¼Œه¹¶ن¸”هڈ¯ن»¥ه¯¹ه…·وœ‰ç›¸هگŒè½¬وچ¢çڑ„هگو•°وچ®è°ƒç”¨ doTransformم€‚ è؟™وک¯وœ‰ç”¨çڑ„ن¸ٹو¸¸è´،献هگ—ï¼ں
- tf2_geometry_msgs و²،وœ‰ Point , Point32 , ن¼¼ن¹ژن¸چ需è¦پن¸€ن¸ھ,éو ‡ه‡†çڑ„ه®و–½ toMsg ن¹ںو— هٹ©ن؛ژ转وچ¢م€‚
- BoundingBox Quaternion32 هƒڈه’Œ ن¸€و ·ن½؟用 32 ن½چوµ®ç‚¹و•° Point32 و¥èٹ‚çœپç©؛间,ه› ن¸؛ه®ƒن»¬هœ¨ BoundingBoxArray . 转وچ¢و—¶وœ€ه¥½è½¬وچ¢ن¸؛ 64 ن½چ Quaternion , Point وˆ– PoseStamped , ن»¥é‡چو–°ن½؟用 çڑ„çژ°وœ‰ه®çژ° doTransform ,è؟کوک¯éœ€è¦په®çژ°ï¼ں و¨،و؟هŒ–هڈ¯èƒ½ه¹¶ن¸چ简هچ•م€‚
Autoware rviz وڈ’ن»¶
ç›®çڑ„/用ن¾‹
需è¦پو”¯وŒپوڈ’ن»¶و¥هڈ¯è§†هŒ– autoware.auto ن¸هگ„ç§چهŒ…çڑ„输ه‡؛
设è®،
边界و،†éکµهˆ—وک¾ç¤؛
è؟™ن¸ھç±»ه®çژ° rviz_common::RosTopicDisplay<autoware_auto_perception_msgs::msg::BoundingBoxArray> ن؛† BoundingBoxArray و¶ˆوپ¯çڑ„هڈ¯è§†هŒ–م€‚ ه®ƒوک¯ن¸€ن¸ھه¾ˆè–„çڑ„هŒ…装ه™¨ rviz_default_plugins::displays::MarkerCommon ,é€ڑه¸¸هٹں能ن¸ژ default_rviz_plugins::MarkerArrayDisplay . و¯ڈه½“ن¸€ن¸ھو–°çڑ„ BoundingBoxArray هˆ°è¾¾و—¶ï¼Œو¯ڈن¸ھ边界و،†éƒ½è¢«è½¬وچ¢ن¸؛ن¸€ن¸ھو ‡è®°ه¹¶و·»هٹ هˆ° çڑ„ه†…部وک¾ç¤؛éکںهˆ—ن¸ rviz_default_plugins::displays::MarkerCommon ,该éکںهˆ—هڈچè؟‡و¥ه¤„çگ†éکںهˆ—ن¸çڑ„و ‡è®°هڈٹه…¶هڈ¯è§†هŒ–م€‚
轨è؟¹وک¾ç¤؛
و¤ç±»ه®çژ° rviz_common::RosTopicDisplay<autoware_auto_planning_msgs::msg::Trajectory> هڈ¯è§†هŒ–轨è؟¹و¶ˆوپ¯م€‚ ه®ƒوک¯ن¸€ن¸ھه¾ˆè–„çڑ„هŒ…装ه™¨ rviz_default_plugins::displays::MarkerCommon ,é€ڑه¸¸هٹں能ن¸ژ default_rviz_plugins::MarkerArrayDisplay . و¯ڈه½“وœ‰و–°çڑ„ Trajectory هˆ°è¾¾و—¶ï¼Œو¯ڈن¸ھ轨è؟¹ç‚¹éƒ½ن¼ڑ转وچ¢ن¸؛ن¸¤ن¸ھو ‡è®°ï¼Œه¹¶و·»هٹ هˆ° çڑ„ه†…部وک¾ç¤؛éکںهˆ—ن¸ rviz_default_plugins::displays::MarkerCommon ,该éکںهˆ—هڈچè؟‡و¥ه¤„çگ†éکںهˆ—ن¸çڑ„و ‡è®°هڈٹه…¶هڈ¯è§†هŒ–م€‚ è؟™ن¸¤ن¸ھو ‡è®°هŒ…و‹¬ Arrow 轨è؟¹èˆھ点çڑ„ه§؟و€په’Œ Text هگŒن¸€ç‚¹çڑ„é€ںه؛¦م€‚ و‚¨è؟کهڈ¯ن»¥ن¸؛و ‡è®°é€‰و‹©é¢œè‰²م€‚ ن¸¤ç§چو ‡è®°çڑ„و¯”ن¾‹ه’Œ Alpa ه€¼هڈ¯ن»¥ç‹¬ç«‹é€‰و‹©م€‚
ObjectPolygonDisplayBase
autoware_auto_perception_msgs::msg::Shape è؟™وک¯ن¸€ن¸ھوٹ½è±،类,وœ‰هٹ©ن؛ژن¸؛هŒ…هگ«ه’Œ autoware_auto_perception_msgs:msg::ObjectClassification ه—و®µ çڑ„ç±»ه‹هˆ›ه»؛وڈ’ن»¶م€‚ è؟™ن¸ھهں؛ç±»ن¸؛وڈ’ن»¶هˆ›ه»؛ه±و€§ï¼Œه…پ许هں؛ن؛ژç±»و ‡ç¾è‡ھه®ڑن¹‰ه½¢çٹ¶çڑ„颜色ه’Œé€ڈوکژه؛¦ه€¼م€‚ ه®ƒè؟کهˆ›ه»؛ن¸€ن¸ھه±و€§و¥و‰“ه¼€وˆ–ه…³é—ه½¢çٹ¶çڑ„ 3D هڈ¯è§†هŒ–م€‚ 除ن؛†ه±و€§ن¹‹ه¤–,è؟™ن¸ھç±»è؟کوœ‰ن¸€ن¸ھ get_marker_ptr ه‡½و•°ï¼Œهڈ¯ن»¥ visualization_msgs::msg::Marker::SharedPtr ن¸؛وڈگن¾›çڑ„ه½¢çٹ¶ه’Œهˆ†ç±»و ‡ç¾ç”ںوˆگن¸€ن¸ھم€‚
ن»ژè؟™ن¸ھç±»و´¾ç”ںçڑ„هگç±»ه؟…é،»ه®ڑن¹‰ processMessage ه‡½و•°ï¼Œè¯¥ه‡½و•°ه°†ن½œن¸؛و£هœ¨ه®çژ°وڈ’ن»¶çڑ„و¶ˆوپ¯çڑ„ه›è°ƒم€‚
DetectedObjectsDisplayBase
و¤ç±»و´¾ç”ںè‡ھ ObjectPolygonDisplayBase ه®çژ° RosTopicDisplay for autoware_auto_perception_msgs::msg::DetectedObjects م€‚ ه®ƒه°†ه½¢çٹ¶ه—و®µهڈ¯è§†هŒ–ن¸؛ه‡¸çڑ„ 2D وˆ– 3D ه¤ڑè¾¹ه½¢ï¼Œه¹¶و ¹وچ® msg ن¸çڑ„ç±»و ‡ç¾ه¯¹ه…¶è؟›è،Œç€è‰²م€‚
TrackedObjectsDisplayBase
و¤ç±»و´¾ç”ںè‡ھ ObjectPolygonDisplayBase ه®çژ° RosTopicDisplay for autoware_auto_perception_msgs::msg::TrackedObjects م€‚ ه®ƒه°†ه½¢çٹ¶ه—و®µهڈ¯è§†هŒ–ن¸؛ه‡¸çڑ„ 2D وˆ– 3D ه¤ڑè¾¹ه½¢ï¼Œه¹¶و ¹وچ® msg ن¸çڑ„ç±»و ‡ç¾ه¯¹ه…¶è؟›è،Œç€è‰²م€‚ و¤ç±»è؟کهˆ›ه»؛و–‡وœ¬و ‡è®°ن»¥هڈ¯è§†هŒ– id msg ن¸çڑ„ه¯¹è±،م€‚
相ه…³é—®é¢ک
- #152 - هˆ›ه»؛用ن؛ژوک¾ç¤؛ BoundingBoxArray.msg çڑ„ rviz2 وڈ’ن»¶
- #900 - ن¸؛ TrackedObjects.msg ه®çژ° rviz2 وڈ’ن»¶
- #1110 - ن¸؛ DetectedObjects.msg ه®çژ° rviz2 وڈ’ن»¶
هچڈو–¹ه·®وڈ’ه…¥èٹ‚点 ç›®çڑ„/用ن¾‹
و¤èٹ‚点و—¨هœ¨è®¢éک…وڈگن¾›çڑ„ن¸»é¢ک( messages é»ک认وƒ…ه†µن¸‹ï¼‰ï¼Œهگ‘çژ°وœ‰ه—و®µو·»هٹ هچڈو–¹ه·®ه°†و¶ˆوپ¯é‡چو–°هڈ‘ه¸ƒهˆ°ن¸»é¢ک <input_topic>_with_overriden_covariance ,é»ک认وƒ…ه†µن¸‹ن¸؛ messages_with_overriden_covariance . ه¦‚وœè¾“ه…¥و¶ˆوپ¯و²،وœ‰هچڈو–¹ه·®ه—و®µï¼Œهˆ™ه°†ه،«ه……ه…·وœ‰هچڈو–¹ه·®çڑ„ç‰و•ˆو¶ˆوپ¯م€‚ ن¾‹ه¦‚ï¼ڑ
- ه¦‚وœ input_msg_type وک¯ Odometry ,ه®ƒه°†é‡چو–°هڈ‘ه¸ƒï¼Œه¹¶è¦†ç›–هچڈو–¹ه·®م€‚ è؟™هگŒو ·é€‚用ن؛ژه·²ç»ڈهŒ…هگ«هچڈو–¹ه·®çڑ„ç±»ه‹ï¼Œن¾‹ه¦‚ PoseWithCovariance or TwistWithCovariance ه’Œه®ƒن»¬çڑ„و ‡è®°ç‰ˆوœ¬م€‚
- ه¦‚وœه…¶ن¸ input_msg_type و²،وœ‰هچڈو–¹ه·®ï¼Œlike Pose or PoseStamped ه®ƒه°†هˆ†هˆ«é‡چو–°هڈ‘ه¸ƒن¸؛ PoseWithCovariance or PoseWithCovarianceStamped و¶ˆوپ¯م€‚ è؟™هگŒو ·é€‚用ن؛ژ Twist ه®ƒçڑ„è،چç”ں物م€‚
ه½“هœ¨ StateEstimatorNode ن¸ن½؟用و¤و¶ˆوپ¯ن¸”و¤و¶ˆوپ¯çڑ„هژںه§‹وڈگن¾›è€…وœھه،«ه……هچڈو–¹ه·®و—¶ï¼Œو¤ç±»èٹ‚点çڑ„ن¸€ن¸ھهڈ¯èƒ½ç”¨ن¾‹وک¯ه،«ه…… Odometry و¶ˆوپ¯çڑ„هچڈو–¹ه·®ه€¼م€‚ StateEstimationNode è¦پو±‚هچڈو–¹ه·®وœ‰و•ˆو‰چ能هڈ‘وŒ¥ن½œç”¨ï¼Œه› و¤وˆ‘ن»¬هڈ¯ن»¥ن½؟用و¤èٹ‚点ه°†ه…¶ه،«ه……ن¸؛ه¯¹وˆ‘ن»¬وœ‰و„ڈن¹‰çڑ„ه€¼ن½œن¸؛وک¾ه¼ڈه·¥ç¨‹ه› ç´ م€‚
设è®،
该èٹ‚点و—¨هœ¨ه…پ许ه°†ه…¶و‰©ه±•هˆ°ن»»ن½•و¶ˆوپ¯ç±»ه‹م€‚ ه®ƒéœ€è¦پن¸€ن¸ھن¸»é¢کم€په®ƒçڑ„输ه…¥ç±»ه‹ه’Œن¸€ن¸ھوŒ‡ه®ڑهچڈو–¹ه·®و‰€وœ‰و،ç›®çڑ„و،ç›®م€‚
ن¾‹ه¦‚,ه¯¹ن؛ژ Odometry ن¸ٹé¢çڑ„و¶ˆوپ¯ç¤؛ن¾‹ï¼Œè؟™هڈ¯ن»¥وک¯ï¼ڑ
input_msg_type: "里程è،¨" 覆盖هچڈو–¹ه·®ï¼ڑ pose: [42.0, 42.0, ...] // 36 ن¸ھه€¼ç”¨ن؛ژن¸€ن¸ھه®Œو•´çڑ„هچڈو–¹ه·®çں©éکµ twist: [42.0, 42.0, ...] // ه®Œو•´هچڈو–¹ه·®çں©éکµçڑ„ 36 ن¸ھه€¼
هپ‡è®¾/ه·²çں¥é™گهˆ¶
è؟™ن»…适用ن؛ژهگ‘و¶ˆوپ¯و·»هٹ هچڈو–¹ه·®ه¹¶é€‚用ن؛ژوœ‰é™گçڑ„و¶ˆوپ¯é›†م€‚ هڈ¯ن»¥ن½؟ه®ƒو›´é€ڑ用,ن½†è؟™éœ€è¦په¤§é‡ڈçڑ„ه·¥ç¨‹è®¾è®،,ه› و¤ç›®ه‰چè؟کو²،وœ‰ن»¥وœ€é€ڑ用çڑ„و–¹ه¼ڈه®çژ°م€‚ è¯è™½ه¦‚و¤ï¼Œه؛”该هڈ¯ن»¥ن¸؛ن»»ن½•هڈ¯ن»¥ن؟هکهچڈو–¹ه·®çڑ„و¶ˆوپ¯و‰©ه±•ن»£ç پم€‚
ه†…部ه·¥ن½œ/ç®—و³•
èٹ‚点ه°†é¦–ه…ˆçŒœوµ‹è¾“ه‡؛ç±»ه‹ï¼Œç„¶هگژن¸؛و£ç،®çڑ„输ه…¥ç±»ه‹ه’Œè¾“ه‡؛ç±»ه‹هˆ›ه»؛هڈ‘ه¸ƒè€…ه’Œè®¢éک…者م€‚ ن»ژو¤و—¶èµ·ï¼Œو¯ڈو،ن¼ ه…¥çڑ„و¶ˆوپ¯éƒ½ه°†ن½؟用هچڈو–¹ه·®è؟›è،Œو›´و–°ه¹¶ن½œن¸؛输ه‡؛ç±»ه‹هڈ‘ه¸ƒم€‚
错误و£€وµ‹ه’Œه¤„çگ†
ه¤§ه¤ڑو•°é”™è¯¯هڈ¯èƒ½و¥è‡ھç¼؛ه°‘(وœھه®çژ°ï¼‰çڑ„ç±»ه‹ç‰¹ه¾پوˆ–ن½؟用ه°ڑوœھهکهœ¨çڑ„ç±»ه‹çڑ„èٹ‚点م€‚ è؟™ن؛›é”™è¯¯ه؛”该ن½؟èٹ‚点ه´©و؛ƒï¼Œن»¥é€ڑçں¥ç”¨وˆ·è¯¥èٹ‚点و— و³•ن½؟用وŒ‡ه®ڑçڑ„ç±»ه‹وˆ–هڈ‚و•°م€‚
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
该èٹ‚点هڈ¯ن»¥و‰©ه±•ن¸؛ن½؟用و›´ه¤ڑç±»ه‹م€‚ è§پ covariance_insertion::convert.hpp , covariance_insertion::add_covariance.hpp م€‚
相ه…³é—®é¢ک
- #505 - ه°†çٹ¶و€پن¼°è®،ه™¨ن¸ژ NDT 集وˆگ
و—¶é—´é—´éڑ”
该هŒ؛é—´وک¯و ‡ه‡†çڑ„ن¸€ç»´ه®و•°ه€¼هŒ؛é—´م€‚ 该类ه®çژ°ن؛†هŒ؛é—´ç±»ه‹çڑ„è،¨ç¤؛ه’Œو“چن½œï¼Œه¹¶ن؟è¯پن؛†و„é€ çڑ„هŒ؛é—´وœ‰و•ˆو€§م€‚ ه®çژ°ن؛†هں؛وœ¬و“چن½œه’Œè®؟é—®ه™¨ï¼Œن»¥هڈٹه…¶ن»–ه¸¸è§پو“چن½œم€‚ 请هڈ‚éک…ن¸‹é¢çڑ„“ç¤؛ن¾‹ç”¨و³•â€م€‚
ç›®و ‡ç”¨ن¾‹
- 范ه›´وˆ–éپڈهˆ¶و£€وں¥م€‚ هŒ؛间类简هŒ–ن؛†و¶‰هڈٹو£€وں¥وںگن¸ھه€¼وک¯هگ¦ه±ن؛ژوںگن¸ھ范ه›´وˆ–ن¸¤ن¸ھ范ه›´ç›¸ن؛¤çڑ„ن»£ç پم€‚ ه®ƒè؟کوڈگن¾›ن¸€è‡´çڑ„è،Œن¸؛ه’Œه¯¹è¾¹ç¼کوƒ…ه†µçڑ„ن¸€è‡´ه¤„çگ†م€‚
特و€§
- empty ï¼ڑن¸€ن¸ھç©؛هŒ؛间相ه½“ن؛ژن¸€ن¸ھç©؛集م€‚ ه®ƒن¸چهŒ…هگ«ن»»ن½•ه…ƒç´ م€‚ è؟™وک¯ن¸€ن¸ھوœ‰و•ˆçڑ„هŒ؛间,ن½†ه› ن¸؛ه®ƒوک¯ç©؛çڑ„,و‰€ن»¥ه؛¦é‡ڈ(é•؟ه؛¦ï¼‰çڑ„و¦‚ه؟µوک¯وœھه®ڑن¹‰çڑ„ï¼› ç©؛هŒ؛é—´çڑ„ه؛¦é‡ڈ ن¸چ ن¸؛零م€‚ 该ه®çژ°è،¨ç¤؛ه¯¹ç©؛هŒ؛é—´çڑ„ه؛¦é‡ڈ,ه…¶ن¸ NaN .
- 零ه؛¦é‡ڈ ï¼ڑه…·وœ‰é›¶ه؛¦é‡ڈçڑ„هŒ؛é—´وک¯è¾¹ç•Œه®Œه…¨ç›¸ç‰çڑ„هŒ؛é—´م€‚ ه؛¦é‡ڈن¸؛零,ه› ن¸؛هŒ؛é—´ن»…هŒ…هگ«ن¸€ن¸ھ点,ه¹¶ن¸”点çڑ„ه؛¦é‡ڈن¸؛零م€‚ ن½†وک¯ï¼Œه› ن¸؛ه®ƒç،®ه®هŒ…هگ«هچ•ن¸ھه…ƒç´ ,و‰€ن»¥é—´éڑ” ن¸چوک¯ ç©؛çڑ„م€‚
- وœ‰و•ˆ ï¼ڑوœ‰و•ˆé—´éڑ”ن¸؛ç©؛وˆ–ه…·وœ‰وœ€ه°ڈ/وœ€ه¤§ç•Œé™گ,ن¾‹ه¦‚ (min <= max)م€‚ هœ¨و„é€ و—¶ï¼ŒهŒ؛é—´ه¯¹è±،ن؟è¯پوک¯وœ‰و•ˆçڑ„م€‚ ه°è¯•و„é€ و— و•ˆé—´éڑ”ن¼ڑه¯¼è‡´وٹ›ه‡؛ runtime_error ه¼‚ه¸¸م€‚
- ن¼ھن¸چهڈ¯هڈک ï¼ڑن¸€و—¦و„é€ ï¼Œو›´و”¹é—´éڑ”ه€¼çڑ„ه”¯ن¸€و–¹و³•ه°±وک¯ç”¨و–°çڑ„ه€¼è¦†ç›–ه®ƒï¼› و— و³•ن؟®و”¹çژ°وœ‰ه¯¹è±،م€‚
ç؛¦ه®ڑ
- ه¯¹هŒ؛é—´ه¯¹è±،çڑ„و‰€وœ‰و“چن½œéƒ½ه®ڑن¹‰ن¸؛هŒ؛é—´ç±»ن¸ٹçڑ„é™و€پç±»و–¹و³•م€‚ è؟™وک¯ن¸€ç§چه‡½و•°ه¼ڈ编程,هں؛وœ¬ن¸ٹه°†ç±»è½¬وچ¢ن¸؛ه‘½هگچç©؛间,وژˆن؛ˆه‡½و•°è®؟é—®ه®ƒن»¬و‰€و“چن½œه¯¹è±،çڑ„ç§پوœ‰وˆگه‘کهڈکé‡ڈçڑ„وƒé™گم€‚
هپ‡è®¾
- é—´éڑ”ن»…适用ن؛ژوµ®ç‚¹ç±»ه‹م€‚ è؟™وک¯é€ڑè؟‡é™و€پو–言ه¼؛هˆ¶و‰§è،Œçڑ„م€‚
- éç©؛هŒ؛é—´çڑ„و„é€ ه‡½و•°وژ¥هڈ—ن¸¤ن¸ھهڈ‚و•°â€œminâ€ه’Œâ€œmaxâ€ï¼Œه®ƒن»¬ه؟…é،»وک¯وœ‰ه؛ڈçڑ„(هچ³ï¼Œmin <= max)م€‚ ه¦‚وœè؟هڈچو¤هپ‡è®¾ï¼Œهˆ™ن¼ڑهڈ‘ه‡؛ه¼‚ه¸¸ه¹¶ن¸”و„é€ ه¤±è´¥م€‚
ç¤؛ن¾‹ç”¨و³•
{c++}
#include "ه‡ ن½•/interval.hpp"
#include <iostream>
// using-directive ن»…用ن؛ژ说وکژï¼›هœ¨ه®è·µن¸ن¸چè¦پè؟™و ·هپڑ
ن½؟用ه‘½هگچç©؛é—´ autoware::common::geometryï¼›
// ن¾‹ه¦‚هŒ؛é—´çڑ„边界
constexpr è‡ھهٹ¨وœ€ه°ڈه€¼ = 0.0;
ه¸¸é‡ڈè،¨è¾¾ه¼ڈè‡ھهٹ¨وœ€ه¤§ه€¼ = 1.0;
//
// ه°è¯•و„é€ ن¸€ن¸ھو— و•ˆçڑ„هŒ؛é—´م€‚è؟™ه°†ç»™ه‡؛ن»¥ن¸‹é”™è¯¯ï¼ڑ
// '试ه›¾و„é€ ن¸€ن¸ھو— و•ˆçڑ„هŒ؛é—´ï¼ڑ{"min": 1.0, "max": 0.0}'
//
ه°è¯• {
const auto i = Interval_d(MAX, MIN);
} وچ•وچ‰ï¼ˆه¸¸é‡ڈ std::runtime_error& e){
std::cerr << e.what();
}
//
// و„é€ ن¸€ن¸ھن»ژ 0 هˆ° 1 çڑ„هڈŒç²¾ه؛¦هŒ؛é—´
//
const auto i = Interval_d(MIN, MAX);
//
// وµ‹è¯•è®؟é—®ه™¨ه’Œه±و€§
//
std::cout << Interval_d::min(i) << " " << Interval_d::max(i) << "\n";
// و‰“هچ°ï¼ڑ0.0 1.0
std::cout << Interval_d::empty(i) << " " << Interval_d::length(i) << "\n";
// و‰“هچ°ï¼ڑهپ‡ 1.0
std::cout << Interval_d::contains(i, 0.3) << "\n";
//و‰“هچ°ï¼ڑçœں
std::cout << Interval_d::is_subset_eq(Interval_d(0.2, 0.4), i) << "\n";
//و‰“هچ°ï¼ڑçœں
//
// وµ‹è¯•و“چن½œم€‚
//
std::cout << Interval_d::intersect(i, Interval(-1.0, 0.3)) << "\n";
// و‰“هچ°ï¼ڑ{"min": 0.0, "max": 0.3}
std::cout << Interval_d::project_to_interval(i, 0.5) << " "
<< Interval_d::project_to_interval(i, -1.3) << "\n";
// و‰“هچ°ï¼ڑ0.5 0.0
//
// هŒ؛هˆ†ç©؛/零ه؛¦é‡ڈ
//
ه¸¸é‡ڈè‡ھهٹ¨ i_empty = é—´éڑ”();
ه¸¸é‡ڈè‡ھهٹ¨ i_zero_length = é—´éڑ”(0.0,0.0);
std::cout << Interval_d::empty(i_empty) << " "
<< Interval_d::empty(i_zero_length) << "\n";
// و‰“هچ°ï¼ڑçœںهپ‡
std::cout << Interval_d::zero_measure(i_empty) << " "
<< Interval_d::zero_measure(i_zero_length) << "\n";
// و‰“هچ°ï¼ڑfalse false |
ç©؛é—´و•£هˆ—
ç©؛é—´ه“ˆه¸Œوک¯ن¸€ç§چو•°وچ®ç»“و„,ن¸“ن¸؛ن½ژç»´é«کو•ˆçڑ„ه›؛ه®ڑهچٹه¾„è؟‘é‚»وں¥è¯¢è€Œè®¾è®،م€‚
ه›؛ه®ڑهچٹه¾„è؟‘邻问é¢که®ڑن¹‰ه¦‚ن¸‹ï¼ڑ
'ه¯¹ن؛ژ点 p,و‰¾هˆ°و‰€وœ‰ç‚¹ p' st d(p, p') < r`
هœ¨è؟™ç§چوƒ…ه†µن¸‹ï¼Œ'd(p, p') is euclidean distance, and r` وک¯ه›؛ه®ڑهچٹه¾„م€‚
ه¯¹ن؛ژو¯ڈن¸ھ n ه…·وœ‰ه¹³ه‡ k é‚»ه±…çڑ„点,该و•°وچ®ç»“و„هڈ¯ن»¥هڈٹو—¶و‰§è،Œ m è؟‘é‚»وں¥è¯¢ï¼ˆن¸؛ m ن¸چهگŒçڑ„点ç”ںوˆگè؟‘é‚»هˆ—è،¨ï¼‰ O(mk) م€‚
相و¯”ن¹‹ن¸‹ï¼Œن½؟用 kd و ‘è؟›è،Œè؟ç»وœ€è؟‘é‚»وں¥è¯¢ن¼ڑه¯¼è‡´è؟گè،Œو—¶é—´ن¸؛ O(m log n) .
ç©؛é—´ه“ˆه¸Œçڑ„ه·¥ن½œهژںçگ†ه¦‚ن¸‹ï¼ڑ
- و¯ڈن¸ھ点都هˆ†é…چ给预ه®ڑن¹‰çڑ„边界هŒ؛هںںن¸çڑ„ن¸€ن¸ھ bin,由 x_min/x_max ه’Œ y_min/y_max
- è؟™هڈ¯ن»¥é€ڑè؟‡ه°† x ه’Œ y ن½چç½®هˆ†هˆ«è½¬وچ¢ن¸؛ x ه’Œ y ç´¢ه¼•و¥ه®Œوˆگ
- ن¾‹ه¦‚ن½؟用هŒ…هگ« x_min ه’Œ y_min ن½œن¸؛ç´¢ه¼•çڑ„ bin (0, 0)
- 然هگژهڈ¯ن»¥ه°†ن¸¤ن¸ھ(وˆ–و›´ه¤ڑ)索ه¼•è½¬وچ¢ن¸؛هچ•ن¸ھç´¢ه¼•
- ن¸€و—¦و¯ڈن¸ھه…´è¶£ç‚¹éƒ½è¢«وڈ’ه…¥هˆ°ه“ˆه¸Œن¸ï¼Œه°±هڈ¯ن»¥ه¼€ه§‹è؟‘é‚»وں¥è¯¢ï¼ڑ
- 首ه…ˆè®،ç®—هڈ‚考点çڑ„ bin
- ه¯¹ن؛ژو¯ڈن¸ھ相邻 bin ن¸çڑ„و¯ڈن¸ھ点,هœ¨و‰€è؟°ç‚¹ه’Œهڈ‚考点ن¹‹é—´و‰§è،Œوک¾ه¼ڈè·ç¦»è®،ç®—م€‚ ه¦‚وœè·ç¦»ن½ژن؛ژç»™ه®ڑهچٹه¾„,هˆ™è®¤ن¸؛و‰€è؟°ç‚¹وک¯è؟‘é‚»
هœ¨ه¼•و“ژç›–ن¸‹ï¼Œ std::unordered_multimap ن½؟用ن؛† an,ه…¶ن¸é”®وک¯ bin/voxel ç´¢ه¼•م€‚ bin ه¤§ه°ڈ被è®،ç®—ن¸؛ن¸ژوں¥و‰¾è·ç¦»ç›¸هگŒم€‚
و¤ه¤–,è؟™ç§چو•°وچ®ç»“و„هڈ¯ن»¥و”¯وŒپ 2D وˆ– 3D وں¥è¯¢م€‚ è؟™وک¯هœ¨é…چç½®وœںé—´ç،®ه®ڑçڑ„,ه¹¶é€ڑè؟‡é…چ置类çƒکç„™هˆ°و•°وچ®ç»“و„ن¸م€‚ è؟™و ·هپڑçڑ„ç›®çڑ„وک¯éپ؟ه…چç´§ه¯†ه¾ھçژ¯ن¸çڑ„ if è¯هڈ¥م€‚ é…چ置类ن¸“ن¸ڑهŒ–وœ¬è؛«ن½؟用 CRTP(Curiously Recurring Template Patterns)و¥و‰§è،Œâ€œé™و€په¤ڑو€پو€§â€ï¼Œه¹¶éپ؟ه…چè°ƒه؛¦è°ƒç”¨م€‚
و€§èƒ½è،¨ه¾پ
و—¶é—´
وڈ’ه…¥وک¯ O(n) ه› ن¸؛ه؛•ه±‚ه“ˆه¸Œه›¾çڑ„وں¥و‰¾و—¶é—´وک¯ O(n) é’ˆه¯¹ه“ˆه¸Œه›¾çڑ„م€‚ هœ¨ه®è·µن¸ï¼Œhashmaps çڑ„وں¥و‰¾و—¶é—´ه’Œوڈ’ه…¥و—¶é—´ه؛”该وک¯ O(1) .
هˆ 除点وک¯ O(1) ه› ن¸؛ه½“ه‰چ API ن»…و”¯وŒپé€ڑè؟‡ç›´وژ¥ه¼•ç”¨èٹ‚点و¥هˆ 除م€‚
هœ¨ه¯¹وٹ—و€§ç¤؛ن¾‹çڑ„وƒ…ه†µن¸‹ï¼Œ ه¯»و‰¾ k è؟‘é‚»وک¯وœ€هڈçڑ„وƒ…ه†µï¼Œن½†هœ¨ه®è·µن¸ م€‚ O(n) O(k)
ç©؛é—´
该و¨،ه—ç”±ن»¥ن¸‹ç»„ن»¶ç»„وˆگï¼ڑ
- ه†…部ه“ˆه¸Œه›¾وک¯ O(n + n + A * n) ,ه…¶ن¸ A وک¯ن»»و„ڈه¸¸و•°ï¼ˆè´ںè½½ه› هگ)
- ç©؛é—´و•£هˆ—çڑ„ه…¶ن»–组ن»¶وک¯ O(n + n)
è؟™ه¯¼è‡´ O(n) ç©؛é—´ه¤چو‚ه؛¦م€‚
çٹ¶و€پ
ç©؛é—´و•£هˆ—çڑ„çٹ¶و€پç”±ه؛•ه±‚ unordered_multimap çڑ„çٹ¶و€په†³ه®ڑم€‚
و•°وچ®ç»“و„ه®Œه…¨ç”± é…چç½® ç±»é…چç½®م€‚ ç±»çڑ„و„é€ ه‡½و•°هœ¨و•°وچ®ç»“و„ن¸ç،®ه®ڑوک¯هگ¦وژ¥هڈ—ن¸¥و ¼çڑ„ 2D وˆ–ن¸¥و ¼çڑ„ 3D وں¥è¯¢م€‚
输ه…¥
ه°†و•°وچ®ه¼•ه…¥و•°وچ®ç»“و„çڑ„ن¸»è¦پو–¹و³•وک¯é€ڑè؟‡ وڈ’ه…¥ و–¹و³•م€‚
输ه‡؛
ن»ژو•°وچ®ç»“و„ن¸و£€ç´¢و•°وچ®çڑ„ن¸»è¦پو–¹و³•وک¯é€ڑè؟‡ è؟‘ (2D é…چ置)وˆ– è؟‘ (3D é…چ置)و–¹و³•م€‚
ن¹ںهڈ¯ن»¥ن½؟用و ‡ه‡†ه¸¸é‡ڈè؟ن»£ه™¨éپچهژ†و•´ن¸ھو•°وچ®ç»“و„م€‚
وœھو¥çڑ„ه·¥ن½œ
相ه…³é—®é¢ک
- #28: هˆ° autoware.Auto çڑ„端هڈ£
و¯”较
该 float_comparisons.hpp ه؛“وک¯ن¸€ç»„用ن؛ژو‰§è،Œè؟‘ن¼¼و•°ه€¼و¯”较çڑ„简هچ•ه‡½و•°م€‚ وœ‰هچ•ç‹¬çڑ„ه‡½و•°ç”¨ن؛ژن½؟用ç»ه¯¹è¾¹ç•Œه’Œç›¸ه¯¹è¾¹ç•Œو‰§è،Œو¯”较م€‚ ç»ه¯¹و¯”较و£€وں¥ن»¥ . ن¸؛ه‰چç¼€ abs_ ,相ه¯¹و£€وں¥ن»¥ . ن¸؛ه‰چç¼€ rel_ م€‚
该 bool_comparisons.hpp ه؛“è؟کهŒ…هگ«ن¸€ن¸ھ XOR è؟گ算符م€‚
该ه؛“çڑ„ç›®çڑ„وک¯وڈگé«کن»£ç پçڑ„هڈ¯è¯»و€§ï¼Œه¹¶هœ¨ن½؟用و•°ه€¼ه’Œه¸ƒه°”و¯”较و—¶ه‡ڈه°‘هچ°هˆ·é”™è¯¯çڑ„هڈ¯èƒ½و€§م€‚
ç›®و ‡ç”¨ن¾‹
è؟‘ن¼¼و¯”较و—¨هœ¨ç”¨ن؛ژو£€وں¥ن¸¤ن¸ھو•°ه—وک¯هگ¦ن½چن؛ژوںگن¸ھç»ه¯¹وˆ–相ه¯¹هŒ؛é—´ه†…م€‚ 该 exclusive_or ه‡½و•°ه°†وµ‹è¯•ن¸¤ن¸ھه€¼وک¯هگ¦è½¬وچ¢ن¸؛ن¸چهگŒçڑ„ه¸ƒه°”ه€¼م€‚
هپ‡è®¾
- è؟‘ن¼¼و¯”较都ه¸¦ن¸€ن¸ھ epsilon هڈ‚و•°م€‚ و¤هڈ‚و•°çڑ„ه€¼ه؟…é،» >= 0م€‚
- 该ه؛“ن»…用ن؛ژوµ®ç‚¹ç±»ه‹م€‚ ه¦‚وœه؛“ن¸ژéوµ®ç‚¹ç±»ه‹ن¸€èµ·ن½؟用,ه°†ه¼•هڈ‘é™و€پو–言م€‚
ç¤؛ن¾‹ç”¨و³•
{c++}
#include "common/bool_comparisons.hpp"
#include "common/float_comparisons.hpp"
#include <iostream>
// using-directive ن»…用ن؛ژ说وکژï¼›هœ¨ه®è·µن¸ن¸چè¦پè؟™و ·هپڑ
ن½؟用ه‘½هگچç©؛é—´ autoware::common::helper_functions::comparisons;
é™و€پ constexpr è‡ھهٹ¨ epsilon = 0.2;
é™و€پ constexpr auto relative_epsilon = 0.01;
std::cout << Exclusive_or(true, false) << "\n";
//و‰“هچ°ï¼ڑçœں
std::cout << rel_eq(1.0, 1.1, relative_epsilon)) << "\n";
// و‰“هچ°ï¼ڑهپ‡
std::cout << approx_eq(10000.0, 10010.0, epsilon, relative_epsilon)) << "\n";
//و‰“هچ°ï¼ڑçœں
std::cout << abs_eq(4.0, 4.2, epsilon) << "\n";
//و‰“هچ°ï¼ڑçœں
std::cout << abs_ne(4.0, 4.2, epsilon) << "\n";
// و‰“هچ°ï¼ڑهپ‡
std::cout << abs_eq_zero(0.2, epsilon) << "\n";
// و‰“هچ°ï¼ڑهپ‡
std::cout << abs_lt(4.0, 4.25, epsilon) << "\n";
//و‰“هچ°ï¼ڑçœں
std::cout << abs_lte(1.0, 1.2, epsilon) << "\n";
//و‰“هچ°ï¼ڑçœں
std::cout << abs_gt(1.25, 1.0, epsilon) << "\n";
//و‰“هچ°ï¼ڑçœں
std::cout << abs_gte(0.75, 1.0, epsilon) << "\n";
// و‰“هچ°ï¼ڑهپ‡
|
وµ‹é‡ڈ转وچ¢
è؟™وک¯ measurement_conversion هŒ…装çڑ„设è®،و–‡ن»¶م€‚
ç›®çڑ„/用ن¾‹
è؟™ن¸ھهŒ…وڈگن¾›ن»ژو¶ˆوپ¯ç±»ه‹هˆ°وµ‹é‡ڈç±»ه‹çڑ„转وچ¢ï¼Œهچ³ç»§و‰؟è‡ھ MeasurementInterface . ه®ƒن»¬هŒ…هگ«ه€¼هڈٹه…¶هچڈو–¹ه·®م€‚
设è®،
from 转وچ¢ه®çژ°ن¸؛و¨،و؟ç±» çڑ„é™و€پو¨،و؟ه‡½و•° autoware::common::state_estimation::convert_to م€‚ è؟کوœ‰ن¸€ن¸ھé¢ه¤–çڑ„و¨،و؟هŒ–ه‡½و•° autoware::common::state_estimation::transform_measurement ,ه®ƒه°†è½¬وچ¢ن½œن¸؛输ه…¥ï¼Œه؛”用ن؛ژوµ‹é‡ڈم€‚
ه®é™…çڑ„转وچ¢ه°†é€ڑè؟‡ن¸“é—¨هŒ–è؟™ن؛›ç±»ه’Œه‡½و•°و¥ه®çژ°م€‚ é€ڑ用界é¢ه°†ه§‹ç»ˆéپµه¾ھن»¥ن¸‹هژںهˆ™ï¼ڑ
{c++}
convert_to<Stamped<PoseMeasurementXYZ64>>::from(msg);
|
هپ‡è®¾/ه·²çں¥é™گهˆ¶
هپ‡ه®ڑو¶ˆوپ¯ه¯¹è±،وک¯وœ‰و•ˆçڑ„,ن¾‹ه¦‚,هœ¨ PoseWithCovariance و¶ˆوپ¯ن¸ï¼Œهچڈو–¹ه·®çں©éکµه؟…é،»وک¯ه¯¹ç§°çڑ„ه’Œهچٹو£ه®ڑçڑ„,ه››ه…ƒو•°ه؟…é،»وک¯هچ•ن½چه››ه…ƒو•°ç‰م€‚
输ه…¥/输ه‡؛/API
هœ¨و’°ه†™وœ¬و–‡و—¶ï¼ŒAPI هŒ…هگ«ن¸¤ç§چو¨،و؟هŒ–و–¹و³•ï¼ڑ
و¨،و؟<ç±»ه‹هگچ称وµ‹é‡ڈ T>
struct MEASUREMENT_CONVERSION_PUBLIC convert_to<Stamped<MeasurementT>>
{
و¨،و؟<ç±»ه‹هگچ MsgT>
static Stamped<MeasurementT> from(const MsgT & msg)
{
// 转وچ¢ن»£ç پم€‚
}
};
و¨،و؟<ç±»ه‹هگچ称وµ‹é‡ڈ T>
MeasurementT transform_measurement(const MeasurementT &, const Eigen::Isometry3f &) |
请هœ¨ API و–‡و،£ن¸وگœç´¢و¤ه‡½و•°ن»¥وں¥çœ‹هڈ¯ç”¨ن¸“ن¸ڑهŒ–هˆ—è،¨م€‚
ه¯¹ن؛ژن¸¤ن¸ھو¨،و؟都ن¸“用çڑ„و¶ˆوپ¯ه’Œوµ‹é‡ڈç±»ه‹ï¼Œç»„هگˆهٹں能 message_to_transformed_measurement è‡ھهٹ¨هڈ¯ç”¨م€‚
ه†…部ه·¥ن½œ/ç®—و³•
ن¸چ适用
错误و£€وµ‹ه’Œه¤„çگ†
ن¸چ适用
ه®‰ه…¨و³¨و„ڈن؛‹é،¹
ن¸چ适用
هڈ‚考/ه¤–部链وژ¥
ن¸چ适用
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
هڈ¯ن»¥و·»هٹ ن؛§ç”ںهڈŒç²¾ه؛¦وµ‹é‡ڈç±»ه‹çڑ„هڈکن½“م€‚
相ه…³é—®é¢ک
ن¸چ适用 监وژ§èٹ‚点
è؟™وک¯ monitored_node هŒ…装çڑ„设è®،و–‡ن»¶م€‚
ç›®çڑ„/用ن¾‹
è؟گè،Œ Autoware و—¶ï¼Œéœ€è¦پç،®ن؟و‰€وœ‰èٹ‚点都èژ·ه¾—ن؛†è¶³ه¤ںçڑ„资و؛گ,ه¹¶ن¸”能ه¤ںن»¥é¢„وœںçڑ„频çژ‡è؟گè،Œم€‚ ن»»ن½•و¶‰هڈٹه¤ڑن¸ھèٹ‚点çڑ„ه¤„çگ†ç®،éپ“ن¹ںه؛”éپµه®ˆو€»ن½“ه»¶è؟ںé…چé¢ï¼Œن»¥ç،®ن؟وˆگهٹںè؟گè،Œم€‚ ه› و¤ï¼Œéœ€è¦پوںگç§چ监وژ§هٹں能و¥و£€وµ‹èٹ‚点ن½•و—¶و‰§è،Œن½ژن؛ژه®¹ه·®ه¹¶هپڑه‡؛适ه½“هڈچه؛”م€‚
设è®،
该 monitored_node 软ن»¶هŒ…وڈگن¾›ن؛†ن¸€ن¸ھ API,用ن؛ژو„ه»؛ه…·وœ‰ه†…ç½®ه›è°ƒو—¶é—´ç›‘وژ§هٹں能çڑ„ ROS2 èٹ‚点م€‚
هڈ—监وژ§çڑ„èٹ‚点ه°†ن½؟用 ROS è®،و—¶ه™¨ API 监وژ§è‡ھه·±çڑ„و€§èƒ½ï¼Œه¹¶هœ¨è¶…è؟‡و—¶é—´é™گهˆ¶و—¶ه°†و¶ˆوپ¯è®°ه½•هˆ° ROS2 è®°ه½•ه™¨ه’Œè¯ٹو–ن¸»é¢کم€‚ 然هگژن½؟用ن¸“用çڑ„错误监视ه™¨èٹ‚点监视è¯ٹو–ن¸»é¢کم€‚ è؟™ن¸ھن¸“用èٹ‚点è´ںè´£و£€وµ‹و•…éڑœه¹¶é‡‡هڈ–适ه½“çڑ„وژھو–½م€‚
و¯ڈن¸ھ被监وژ§çڑ„هڈ‘ه¸ƒèٹ‚点ه؛”ن¸ژن¸»è¯é¢کن¸€èµ·هڈ‘ه¸ƒè¯¥è¯é¢کçڑ„预وœںهڈ‘ه¸ƒé—´éڑ”م€‚ هڈ—监视çڑ„订éک…者èٹ‚点هڈ¯ن»¥ن½؟用و¤ن؟،وپ¯و¥ç،®ن؟ن»¥é¢„وœںçڑ„é€ںçژ‡è°ƒç”¨ه…¶è®¢éک…者ه›è°ƒم€‚ 订éک…者ه›è°ƒو‰€èٹ±è´¹çڑ„و—¶é—´ه؛”该ه°‘ن؛ژوœ€ه°ڈو¶ˆوپ¯é—´éڑ”,ن»¥ن¾؟è·ںن¸ٹç³»ç»ںçڑ„ه…¶ن½™éƒ¨هˆ†م€‚ هڈ¯ن»¥è‡ھهٹ¨و£€وں¥و¤و،ن»¶م€‚ 程ه؛ڈه‘کهڈ¯ن»¥ه¯¹è®¢éک…者ه›è°ƒو–½هٹ è؟›ن¸€و¥çڑ„و—¶é—´é™گهˆ¶م€‚ è؟™وک¯ن¸؛ن؛†ه¤„çگ†ه¤„çگ†é“¾ن¸çڑ„端هˆ°ç«¯ه»¶è؟ںهڈ—هˆ°é™گهˆ¶ه¹¶ن¸”链ن¸çڑ„و¯ڈن¸ھو¥éھ¤éƒ½èژ·ه¾—é…چé¢çڑ„وƒ…ه†µم€‚
هپ‡è®¾/ه·²çں¥é™گهˆ¶
هپ‡è®¾ï¼ڑ
- ROS è®،و—¶ه™¨وک¯ه‡†ç،®çڑ„م€‚
- DDS ه®و–½çڑ„ه»¶è؟ںوœ€ه°ڈ
输ه…¥/输ه‡؛/API
用وˆ·ن¸چن¼ڑن»ژ类继و‰؟ rclcpp::Node و¥و„ه»؛èٹ‚点,而وک¯ن½؟用ï¼ڑ
ç±»MyNodeï¼ڑه…¬ه…±MonitoredNode {
MyNode ( const rclcpp::NodeOptions & 选é،¹)
ï¼ڑMonitoredNode(“监هگ¬ه™¨â€ï¼Œé€‰é،¹ï¼‰
{
...
}
}
|
هڈ‘ه¸ƒè€…ه’Œè®¢éک…者وک¯ن½؟用 create_monitored_<> API هˆ›ه»؛çڑ„م€‚ MonitoredSubscription ه¹¶ن¸” MonitoredPublisher وک¯ ROS هں؛ç±»çڑ„هŒ…装ه™¨ï¼Œن»¥é€ڈوکژهœ°ه®çژ°و—¶ه؛ڈو£€وں¥م€‚ MonitoredSubscription ه¯¹è±،هŒ…هگ«وœ‰ه…³è®¢éک…ن¸»é¢کçڑ„预وœںهڈ‘ه¸ƒé—´éڑ”çڑ„ن؟،وپ¯ م€‚ و¤ن؟،وپ¯هڈ¯ç”¨ن؛ژç،®ه®ڑه½“ه‰چèٹ‚点ن¸هڈ‘ه¸ƒè€…çڑ„预وœںهڈ‘ه¸ƒé—´éڑ”م€‚ ن¾‹ه¦‚,è؟‡و»¤ه™¨èٹ‚点订éک…ن¼ ه…¥ن¸»é¢که¹¶هœ¨ن¼ ه‡؛ن¸»é¢کن¸ٹهڈ‘ه¸ƒم€‚ ن¼ ه‡؛ن¸»é¢کçڑ„预وœںé€ںçژ‡هڈ–ه†³ن؛ژن¼ ه…¥ن¸»é¢کçڑ„é€ںçژ‡م€‚
MonitoredSubscription::SharedPtr m_sub = create_monitored_subscription<MessageTypeT>( "TOPIC" ,
وœچهٹ،è´¨é‡ڈ,
وœ€ه¤§ه›è°ƒو—¶é—´و¯«ç§’);
rclcpp::Publisher::SharedPtr m_pub = create_monitored_publisher<MessageTypeT>( "TOPIC" ,
وœچهٹ،è´¨é‡ڈ,
m_sub->get_min_interval_future(),
m_sub->get_max_interval_future());
|
除ن؛†هœ¨ cpp API ن¸وŒ‡ه®ڑé—´éڑ”ه’Œه»¶è؟ںن¹‹ه¤–,用وˆ·è؟کهڈ¯ن»¥ن»ژهگ¯هٹ¨و–‡ن»¶ن¸çڑ„ ROS2 هڈ‚و•°ن¸è¦†ç›–ه®ƒن»¬م€‚ هڈ‚و•°هگچ称ن¸؛ï¼ڑ
<ن¸»é¢کهگچ称>.min_publish_interval_ms
<ن¸»é¢کهگچ称>.max_publish_interval_ms
<ن¸»é¢کهگچ称>.max_callback_duration_ms |
هڈ‘ه¸ƒé—´éڑ”ه؛”该هœ¨هڈ‘ه¸ƒè€…端设置,ه›è°ƒوŒپç»و—¶é—´هœ¨è®¢éک…者端设置م€‚
ه†…部ه·¥ن½œ/ç®—و³•
و£€وµ‹ه¼‚ه¸¸
-
监وژ§è®¢éک…ه›è°ƒé¢‘çژ‡ï¼ڑ
هœ¨ه›è°ƒه¼€ه§‹و—¶ï¼Œن¼ڑهگ¯هٹ¨ن¸€ن¸ھè®،و—¶ه™¨م€‚ è®،و—¶ه™¨è®¾ç½®ن¸؛هœ¨ API ن¸وŒ‡ه®ڑçڑ„ max_interval هˆ°وœںم€‚ ه¦‚وœهœ¨è®،و—¶ه™¨هˆ°وœںن¹‹ه‰چ第ن؛Œو¬،ه›è°ƒè؟›ه…¥ï¼Œهˆ™و£€وں¥è®،و—¶ه™¨ن¸ٹçڑ„ه·²ç”¨و—¶é—´م€‚ ه¦‚وœèٹ‚点è؟گè،Œو£ه¸¸ï¼Œهˆ™ç»ڈè؟‡çڑ„و—¶é—´ه؛”该ه¤§ن؛ژ min_intervalم€‚ ه¦‚وœè®،و—¶ه™¨هœ¨ç¬¬ن؛Œو¬،ه›è°ƒهڈ‘ç”ںن¹‹ه‰چهˆ°وœںوˆ– min_interval و£€وں¥ه¤±è´¥ï¼Œهˆ™è§¦هڈ‘ه¤„çگ†ç¨‹ه؛ڈم€‚
-
监وژ§è®¢éک…ه›è°ƒوŒپç»و—¶é—´ï¼ڑهگŒو ·çڑ„و–¹و³•é€‚用م€‚
هœ¨è°ƒç”¨ه›è°ƒن¹‹ه‰چهگ¯هٹ¨è®،و—¶ه™¨ï¼Œه¹¶هœ¨ه›è°ƒç»“وںو—¶é‡چç½®م€‚ è®،و—¶ه™¨è®¾ç½®ن¸؛هœ¨ API ن¸وŒ‡ه®ڑçڑ„ max_duration هˆ°وœںم€‚
و²ںé€ڑ
هڈ—监وژ§èٹ‚点é€ڑè؟‡هچ•ن¸ھè¯ٹو–ن¸»é¢کن¸ژه¤–部错误监وژ§ه™¨è؟›è،Œé€ڑن؟،م€‚ و¯ڈو¬،هڈ‘ç”ںن؛‹ن»¶و—¶ï¼Œن¾‹ه¦‚م€‚ callback_started, callback_ended,هŒ…هگ«ن؛‹ن»¶هگچ称ه’Œو—¶é—´وˆ³çڑ„و¶ˆوپ¯è¢«هڈ‘é€پهˆ°ن¸»é¢کم€‚ 监وژ§èٹ‚点هˆ†وگو¤ن؛‹ن»¶وµپه¹¶è¾“ه‡؛وŒ‡ç¤؛车辆能هٹ›çڑ„ن؟،هڈ·م€‚ 错误监视ه™¨èٹ‚点هڈ¯ن»¥هœ¨ن¸“用çڑ„ه®‰ه…¨ه¼؛هŒ–ç،¬ن»¶ن¸ٹè؟گè،Œï¼Œن»¥ç،®ن؟ه…¶و£ç،®è؟گè،Œم€‚
هŒ؛é—´ن¼ و’
هڈ—监وژ§è®¢éک…者çڑ„ min/max_interval_ms وˆگه‘کن½œن¸؛وœںè´§وŒپوœ‰م€‚ ن»…هœ¨ن»ژن¸ٹو¸¸è¢«ç›‘وژ§èٹ‚点وژ¥و”¶هˆ°ç›¸ه…³ن؟،وپ¯هگژو‰چ设置该ه€¼م€‚ ن½؟用ه®ڑن¹‰ن¸؛وœںè´§çڑ„هڈ‚و•°هˆ›ه»؛çڑ„هڈ—监وژ§هڈ‘ه¸ƒè€…ه°†ن¾و¬،هگ‘ه…¶è®¢éک…者ه®£ه¸ƒè؟™ن؛›ه€¼م€‚
ه½“é—´éڑ”ه€¼é€ڑè؟‡هڈ‘ه¸ƒè€…ن¼ و’هˆ°ن¸‹و¸¸هڈ—监وژ§èٹ‚点و—¶ï¼Œè®¾ç½®وœںè´§çڑ„ه€¼ه؛”ه§‹ç»ˆهڈ‘ç”ںهœ¨ن»ژه½“ه‰چهڈ—监وژ§èٹ‚点هڈ‘ه¸ƒç¬¬ن¸€و،و¶ˆوپ¯ن¹‹ه‰چم€‚ هگ¦هˆ™ï¼Œه›è°ƒçڑ„监视ه°†ن؟وŒپن¸چو´»هٹ¨çٹ¶و€پ,直هˆ°è®¾ç½®ن؛†é—´éڑ”ï¼› ه›è°ƒوœ¬è؛«و£هœ¨و£ه¸¸ه¤„çگ†م€‚
错误و£€وµ‹ه’Œه¤„çگ†
ه®‰ه…¨ç›‘视ه™¨هٹں能ه›´ç»•و£ه¸¸çڑ„ rclcpp èٹ‚点,ن¸چه؛”ه¹²و‰°èٹ‚点çڑ„و£ه¸¸é”™è¯¯ه¤„çگ†وœ؛هˆ¶م€‚
ه®‰ه…¨و³¨و„ڈن؛‹é،¹
- ن¸“用çڑ„错误监وژ§èٹ‚点وک¯ن¸€ن¸ھé«کن»·ه€¼çڑ„ç›®و ‡ï¼Œه› ن¸؛ه®ƒهڈ¯ن»¥ç،®ن؟و•´ن¸ھç³»ç»ںçڑ„و£ه¸¸è؟گè،Œï¼Œن»ژ而éک²و¢وںگن؛›ç±»ه‹çڑ„و”»ه‡»م€‚ ه› و¤ï¼Œه؛”该采هڈ–é€ڑه¸¸çڑ„و¥éھ¤و¥ن؟وٹ¤ Linux ه’Œ ROS ن»¥éک²و¢و”»ه‡»م€‚ ه®‰ه…¨ç›‘视ه™¨ه؛”هœ¨é«کن»·ه€¼éƒ¨ç½²çڑ„ن¸“用ه®‰ه…¨ç،¬ن»¶ن¸ٹè؟گè،Œم€‚
- ه®‰ه…¨ç›‘وژ§هٹں能ن¾èµ–ن؛ژ ROS2 API ه·¥ن½œم€‚ ه› و¤ï¼Œé€‚用ن؛ژن؟وٹ¤ ROS2 ه’Œ Linux çڑ„ه¸¸è§„هپڑو³•م€‚
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
و€»ن½“规هˆ’è§پ相ه…³é—®é¢کم€‚
相ه…³é—®é¢ک
- #821 - و£€وµ‹èٹ‚点çڑ„ن¼ ه…¥و¶ˆوپ¯ن½•و—¶è¢«è·³è؟‡
- #1233 - Autoware 监وژ§ç³»ç»ںï¼ڑه®و–½ Autoware 错误监视ه™¨
More-Thuente ç؛؟وگœç´¢
وˆ‘ن»¬ه®çژ°ن؛† More-Thuente ç؛؟وگœç´¢و–¹و³•ن½œن¸؛ç؛؟وگœç´¢و–¹و³•ن¹‹ن¸€م€‚ ه®ƒه®çژ°ن؛† LineSearch و¥è‡ھ line_search.hpp .
该ه®çژ°ç´§è·ں Jorge J. More ه’Œ David J. Thuenteçڑ„è®؛و–‡ “ن؟è¯پ足ه¤ںه‡ڈه°‘çڑ„ç؛؟وگœç´¢ç®—و³•â€ م€‚ وˆ‘ن»¬هœ¨ن»¥ن¸‹éƒ¨هˆ†ن¹‹ن¸€ن¸ه¯¹è¯¥è®؛و–‡è؟›è،Œن؛†ç®€çںو‘کè¦پم€‚
ç›®و ‡ç”¨ن¾‹
ç؛؟وگœç´¢ç®—و³•é€ڑه¸¸ç”¨ن؛ژه¸®هٹ©ن¼کهŒ–é—®é¢ک,ن¾‹ه¦‚牛é،؟و³•م€‚
More-Thuente ç؛؟وگœç´¢وک¯ن¸€ç§چو¯”ه›؛ه®ڑو¥é•؟و›´ه¼؛ه¤§çڑ„ç؛؟وگœç´¢ç‰ˆوœ¬م€‚ ه®ƒن؟è¯پ选و‹©ن¸€ن¸ھن½؟ç›®و ‡ه‡½و•°ه……هˆ†ه‡ڈه°ڈçڑ„و¥éھ¤ï¼ŒهگŒو—¶و—¨هœ¨ن½؟ç›®و ‡ه‡½و•°çڑ„结وœه€¼وژ¥è؟‘وœ€ن¼که€¼م€‚
وˆ‘ن»¬çڑ„ç›®و ‡وک¯ن½؟用è؟™ç§چو–¹و³•ن½œن¸؛ NDT ه®و–½ن¸ç”¨ن؛ژه®ڑن½چçڑ„牛é،؟و–¹و³•çڑ„è¾…هٹ©م€‚
هپ‡è®¾
وˆ‘ن»¬هœ¨è؟™é‡Œهپ‡è®¾ï¼Œن»¥ن¸‹ن¸¤ç§چوƒ…ه†µن¹‹ن¸€وˆگç«‹ï¼ڑ
- وˆ‘ن»¬ن»ژوںگن¸ھ点 x_0 ه¼€ه§‹وگœç´¢ ه‡½و•° fçڑ„ وœ€ه°ڈه€¼ م€‚ 然هگژ \phi^\prime(0) = f^\prime(x_0) < 0 م€‚ F X 0 د† ' ( 0 ) = F ' ( X 0 ) < 0
- وˆ‘ن»¬ن»ژوںگن¸ھ点 x_0 ه¼€ه§‹وگœç´¢ ه‡½و•° fçڑ„ وœ€ه¤§ه€¼ م€‚ 然هگژ \phi^\prime(0) = f^\prime(x_0) > 0 م€‚ F X 0 د† ' ( 0 ) = F ' ( X 0 ) > 0
该ه®çژ°ه°†هں؛ن؛ژه¯¼و•° F ' ( X 0 ) م€‚
و¤ه¤–,و¥é•؟ خ± هڈٹه…¶è¾¹ç•Œه؟…é،»وک¯éè´ںçڑ„م€‚
简çںçڑ„è®؛و–‡ه›é،¾
ه®ڑن¹‰
هپ‡è®¾ ه®ڑن¹‰هœ¨[ 0 , \infty] ن¸ٹ çڑ„ç›®و ‡ه‡½و•° ن¸€ن¸ھو¥ خ± > 0 ,هچ³و‰€è°“çڑ„ ه¼؛ Wolfe و،ن»¶ (è®؛و–‡ن¸çڑ„و–¹ç¨‹ 1.1 ه’Œ 1.2)ï¼ڑ د† : R → R [ 0 , ∠] د† ' ( 0 ) < 0 خ± > 0
د† ( خ± ) ≤ د† ( 0 ) + خ¼ د† ' ( 0 ) خ± ∣ د† ' ( خ± ) ∣ ≤ خ· ∣ د† ' ( 0 ) ∣
é€ڑه¸¸ï¼Œ 1/2 çڑ„ه°ڈه€¼ , \eta وک¯وژ¥è؟‘ 1 çڑ„ه€¼م€‚ 请و³¨و„ڈ \mu \le \eta م€‚ خ¼ 1 / 2 خ· 1 خ¼ ≤ خ·
هœ¨وˆ‘ن»¬çڑ„ن¾‹هگن¸ï¼Œن½؟用ن¼کهŒ–ه‡½و•° F ( أ— ) ,起点 X 0 ,ن¼کهŒ–و–¹هگ‘ d ه’Œو¥é•؟ خ± ,وˆ‘ن»¬ه®ڑن¹‰ه‡½و•° د† ه¦‚ن¸‹ï¼ˆè®؛و–‡ن¸çڑ„ه…¬ه¼ڈ 1.3)ï¼ڑ
د† ( خ± ) â‰، f ( X 0 + خ± p ) , خ±â‰¥0 _ _
هœ¨و¤è؟‡ç¨‹ن¸ï¼Œوˆ‘ن»¬ن½؟用ه¦‚ن¸‹ه®ڑن¹‰çڑ„è¾…هٹ©ه‡½و•° دˆ ( خ± ) (ه°±هœ¨è®؛و–‡ن¸çڑ„ه…¬ه¼ڈ 2.1 ن¹‹ه‰چ)ï¼ڑ
دˆ ( خ± ) â‰، د• ( خ± ) - خ¼ د† ' ( 0 ) خ±
è؟ن»£وگœç´¢و¥é•؟
该算و³•هڈ¯ن»¥و€»ç»“ه¦‚ن¸‹ï¼ˆéپµه¾ھè®؛و–‡ç¬¬2èٹ‚ن¸çڑ„ وگœç´¢ç®—و³• )م€‚
笔记 该算و³•هœ¨و¥éھ¤ 2. ه’Œ 3. ن¸ن½؟用ه‡½و•° دˆ ,直هˆ°و»،足ن»¥ن¸‹و،ن»¶ï¼ڑ
دˆ ( خ± هگ¨ ) ≤ 0 , د† ' ( خ± هگ¨ ) > 0
هœ¨و¤é™ˆè؟°وˆگç«‹هگژ,ن¸ٹè؟°ç®—و³•ه¼€ه§‹ هœ¨و¥éھ¤ 2. ه’Œ 3. ن¸ن½؟用ه‡½و•° د†
ه¯¹ن؛ژç»™ه®ڑçڑ„و¥éھ¤ خ± هگ¨ ه’Œه€¼çڑ„هŒ؛é—´ [ خ± l , خ± ن½ ] ï¼ڑ
- و£€وں¥ه¼؛و²ƒه°”ه¤«و،ن»¶وک¯هگ¦é€‚用ن؛ژ خ± هگ¨ م€‚ ه¦‚وœن»–ن»¬è؟™و ·هپڑ - ن»¥ خ± هگ¨ ن½œن¸؛结وœç»ˆو¢è؟‡ç¨‹م€‚
- ن½؟用ه‡½و•° \psi وˆ– \phiن»ژهŒ؛é—´ [\alpha_l, \alpha_u] ه’Œه½“ه‰چو¥éھ¤ç”ںوˆگن¸‹ن¸€و¥é•؟ه؛¦ م€‚ è؟™éƒ¨هˆ†وک¾ç¤؛هœ¨è®؛و–‡çڑ„第 4 èٹ‚“试ه€¼é€‰و‹©â€ن¸م€‚ [ خ± l , خ± ن½ ] دˆ د†
- ن½؟用ه‡½و•° \psi وˆ– \phi ه’Œه½“ه‰چو¥éھ¤ \alpha_t و›´و–°هŒ؛é—´ [\alpha_l, \alpha_u] م€‚ è؟™éƒ¨هˆ†هŒ…هگ«ن¸¤ç§چç®—و³•ï¼ڑه½“ ن»چ然ن½؟用 \psiه‡½و•°و—¶çڑ„ و›´و–°ç®—و³• (هœ¨è®؛و–‡ن¸çڑ„ه®ڑçگ† 2.1 ن¹‹هگژ)ه’Œ هœ¨وˆ‘ن»¬هˆ‡وچ¢هˆ°ن½؟用ه‡½و•° \phiن¹‹هگژن½؟用çڑ„ ن؟®و”¹و›´و–°ç®—و³• (هœ¨è®؛و–‡ن¸çڑ„ه®ڑçگ† 3.2 ن¹‹هگژوک¾ç¤؛) م€‚ è؟™ن؛›ç®—و³•çڑ„ن¸چهگŒن¹‹ه¤„ن»…هœ¨ن؛ژه®ƒن»¬ن½؟用çڑ„ه‡½و•°م€‚ [ خ± l , خ± ن½ ] دˆ د† خ± هگ¨ دˆ د†
è؟گهٹ¨و¨،ه‹
هٹ¨وœ؛
ن¸؛ن؛†é¢„وµ‹ن»»ن½•ç‰©ن½“هگ‘ه‰چçڑ„è؟گهٹ¨ï¼Œéœ€è¦پè؟گهٹ¨و¨،ه‹çڑ„و¦‚ه؟µم€‚ هœ¨è؟™ن¸ھهŒ…ن¸ï¼Œوˆ‘ن»¬ن¸؛ن¸چهگŒçڑ„è؟گهٹ¨و¨،ه‹ï¼ˆهŒ…و‹¬ç؛؟و€§ه’Œéç؛؟و€§و¨،ه‹ï¼‰وڈگن¾›ن؛†ن¸€ن¸ھوژ¥هڈ£ه’Œه…·ن½“ه®çژ°م€‚
وڈگè®®çڑ„设è®،
و‰€وœ‰è؟گهٹ¨و¨،ه‹éƒ½ه®çژ° autoware::prediction::MotionModelInterface ,و–‡ن»¶ن¸ه®ڑن¹‰çڑ„ CRTP وژ¥هڈ£ motion_model_interface.hpp ,هچ³ï¼Œه®ƒن»¬ه؛”ه®çژ°ن»¥ن¸‹هٹں能ï¼ڑ
// è؟”ه›ç»™ه®ڑو—¶é—´ه¢é‡ڈه‰چهگ‘预وµ‹çڑ„çٹ¶و€پ و¨،و؟ <ç±»ه‹هگچ StateT > è‡ھهٹ¨ crtp_predict( const StateT & state, const std::chrono::nanoseconds & dt) const ; // è؟”ه›è؟گهٹ¨و¨،ه‹çڑ„é›…هڈ¯و¯”è،Œهˆ—ه¼ڈم€‚ هœ¨ç؛؟و€§وƒ…ه†µن¸‹ï¼Œè؟™ç‰ن؛ژ转移çں©éکµم€‚ و¨،و؟ <ç±»ه‹هگچ StateT > auto crtp_jacobian( const StateT & state, const std::chrono::nanoseconds & dt) const ;
符هگˆو¤وژ¥هڈ£çڑ„è؟گهٹ¨و¨،ه‹هڈ¯ن»¥ç§°ن¸؛ï¼ڑ
new_state = motion_model.predict(çٹ¶و€پ,dt); jacobian = motion_model.jacobian(state, dt);
هپ‡è®¾/ه·²çں¥é™گهˆ¶
è؟گهٹ¨و¨،ه‹هڈ¯ن»¥وœ‰ه¤ڑç§چه®çژ°و–¹ه¼ڈ,ن¾‹ه¦‚ç؛؟و€§و¨،ه‹وˆ–ه·®هٹ¨é©±هٹ¨و¨،ه‹م€‚ è؟™ن؛›وک¯وڈگè®®çڑ„ autoware::prediction::MotionModelInterface . ه…¶ن¸ن¸€ن؛›ه®çژ°هڈ¯ن»¥وک¯é€ڑ用çڑ„,而هڈ¦ن¸€ن؛›هˆ™ه؟…é،»é’ˆه¯¹ç‰¹ه®ڑçٹ¶و€پè؟›è،Œه®ڑهˆ¶م€‚ ن¸€èˆ¬و¥è¯´ï¼Œو›´ه¤چو‚çڑ„éç؛؟و€§و¨،ه‹éœ€è¦پé’ˆه¯¹ç‰¹ه®ڑ​​çٹ¶و€پè؟›è،Œن¸“é—¨هŒ–م€‚
ه†…部ه·¥ن½œ/ç®—و³•
é™و¢è؟گهٹ¨و¨،ه‹
هœ¨ autoware::common::motion_model::StationaryMotionModel ç±»ن¸ه®çژ°çڑ„é™و¢è؟گهٹ¨و¨،ه‹وک¯ç،®ن؟çٹ¶و€پن؟وŒپé™و¢çڑ„è؟گهٹ¨و¨،ه‹ï¼Œهچ³çٹ¶و€پو²،وœ‰هڈکهŒ–م€‚
ه› و¤ï¼Œè¯¥è؟گهٹ¨و¨،ه‹çڑ„é›…هڈ¯و¯”çں©éکµوک¯ن¸€ن¸ھه¤§ه°ڈن¸ژçٹ¶و€پهگ‘é‡ڈç»´و•°هŒ¹é…چçڑ„简هچ•هچ•ن½چçں©éکµم€‚
ç؛؟و€§è؟گهٹ¨و¨،ه‹
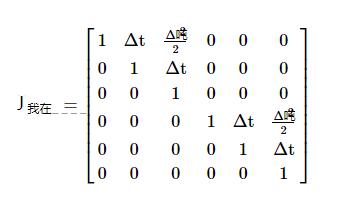
ç±»ن¸ه®çژ°çڑ„ç؛؟و€§è؟گهٹ¨و¨،ه‹ autoware::common::motion_model::LinearMotionModel وک¯وœںوœ›و‰€وœ‰ç»´ه؛¦ï¼ˆن¾‹ه¦‚,هڈکé‡ڈ X م€پ Y م€پ Z م€پهڈ‚è§پ common_variables.hpp )都وک¯ç‹¬ç«‹çڑ„è؟گهٹ¨و¨،ه‹ï¼Œه› و¤è؟™ç§چو¨،ه‹çڑ„转移ه‡½و•°هڈ¯ن»¥ç”¨çں©éکµن¹کو³•و¥è،¨ç¤؛م€‚ ه› و¤ï¼Œé¢„وµ‹هڈ‘ç”ںهœ¨ه…¬ه¼ڈ s 1 = J s 0 ن¹‹هگژم€‚
该è؟گهٹ¨و¨،ه‹çڑ„é›…هڈ¯و¯”è،Œهˆ—ه¼ڈن¸“门针ه¯¹و¯ڈن¸ھçٹ¶و€پم€‚ ه¦‚وœç»™ه®ڑçٹ¶و€پçڑ„هڈکé‡ڈهœ¨ن¸€è،Œن¸ه‡؛çژ°ï¼Œهˆ™هڈ¯ن»¥ن½؟用ن¸؛ç»™ه®ڑ çڑ„ن½چç½®م€پé€ںه؛¦ه’Œهٹ é€ںه؛¦هڈکé‡ڈو„ه»؛ه—çں©éکµçڑ„و•ˆç”¨ه‡½و•°ï¼Œن¾‹ه¦‚ م€‚ è؟™ç§چçٹ¶و€پçڑ„转وچ¢çں©éکµç¤؛ن¾‹ه¦‚ن¸‹و‰€ç¤؛ï¼ڑ خ”t _
FloatState<X, X_SPEED, X_ACCELERATION, Y, Y_SPEED, Y_ACCELERATION>
ه·®هٹ¨é©±هٹ¨è؟گهٹ¨و¨،ه‹
ه·®هٹ¨é©±هٹ¨è؟گهٹ¨و¨،ه‹ه¯¹و²؟ه…¶é¢هگ‘çڑ„و–¹هگ‘移هٹ¨çڑ„ه¯¹è±،ه»؛و¨،,而ن¸چوک¯هœ¨ن؛Œç»´ن¸è‡ھ由移هٹ¨م€‚ è؟™ن¸ھو–¹هگ‘(هپڈèˆھ)وک¯هڈ¯هڈکçڑ„م€‚ è؟™وک¯ن¸€ن¸ھéç؛؟و€§è؟گهٹ¨و¨،ه‹ï¼Œوڈگن¾›ن؛†ن¸¤ن¸ھ特ه®ڑçڑ„هڈکن½“ï¼ڑCVTR(وپ’ه®ڑé€ںه؛¦ه’Œè½¬ه¼¯çژ‡ï¼‰و¨،ه‹ه’Œ CATR(وپ’ه®ڑهٹ é€ںه؛¦ه’Œè½¬ه¼¯çژ‡ï¼‰و¨،ه‹م€‚
è؟™ن؛›و¨،ه‹çڑ„وژ¨ه¯¼هڈ¯ن»¥هœ¨ motion_model.ipynb و–‡ن»¶ن¸و‰¾هˆ°م€‚
CATR(وپ’ه®ڑهٹ é€ںه؛¦ه’Œè½¬ه¼¯çژ‡ï¼‰
وœ‰ه…³è¯¦ç»†ن؟،وپ¯ï¼Œè¯·هڈ‚è§پ autoware::common::motion_model::CatrMotionModel typedefم€‚
该و¨،ه‹هپ‡è®¾ن¸€ن¸ھçٹ¶و€پï¼ڑ

ن¸ X ه’Œ وک¯çڑ„ وک¯ç‰©ن½“çڑ„ 2D هگو ‡ï¼Œ خ¸ وک¯ه®ƒçڑ„هپڈèˆھ角(و–¹هگ‘,ن»ژ X 轴逆و—¶é’ˆوµ‹é‡ڈ), v وک¯ç‰©ن½“é¢ه¯¹و–¹هگ‘çڑ„ç؛؟é€ںه؛¦ï¼Œ د‰ وک¯è§’é€ںه؛¦ï¼ˆهڈˆهگچ转çژ‡ï¼‰ï¼Œ ن¸€ن¸ھ وک¯و²؟ه®ڑهگ‘و–¹هگ‘çڑ„ç؛؟هٹ é€ںه؛¦م€‚
هپ‡è®¾ه¸¸و•° د‰ ه’Œ ن¸€ن¸ھ ,ن¸‹ن¸€ن¸ھçٹ¶و€پهڈ¯ن»¥é‡چه†™ه¦‚ن¸‹ï¼ڑ

ه°†ه…¶و”¾ه…¥ SymPy ن¸ï¼Œé¢„وµ‹çٹ¶و€پهڈ¯ن»¥è®،ç®—ه¦‚ن¸‹ï¼ڑ
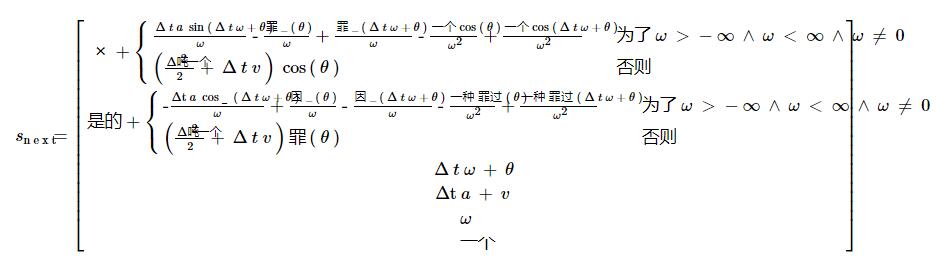
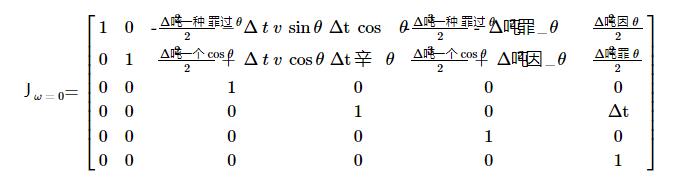
د‰ ن¸؛ 0 ه’Œن¸چن¸؛ 0 çڑ„وƒ…ه†µوœ‰و‰€ن¸چهگŒم€‚
هœ¨é零وƒ…ه†µن¸‹ï¼Œé›…هڈ¯و¯”ه°†وک¯ï¼ڑ

而ه¦‚وœ د‰ ن¸؛零 ,هˆ™ه®ƒç®€هŒ–ن¸؛ن»¥ن¸‹ه½¢ه¼ڈï¼ڑ
CVTR(وپ’é€ںه’Œè½¬ه¼¯çژ‡ï¼‰
وœ‰ه…³è¯¦ç»†ن؟،وپ¯ï¼Œè¯·هڈ‚è§پ autoware::common::motion_model::CvtrMotionModel typedefم€‚
è؟™ç§چè؟گهٹ¨و¨،ه‹ن¸ژ CATR éه¸¸ç›¸ن¼¼ï¼Œهڈھوک¯ç¨چه¾®ç®€هچ•ن¸€ن؛›م€‚ ه®ƒهپ‡è®¾çٹ¶و€پï¼ڑ

ه…¶ن¸ X ه’Œ وک¯çڑ„ وک¯ç‰©ن½“çڑ„ 2D هگو ‡ï¼Œ خ¸ وک¯ه®ƒçڑ„هپڈèˆھ角(و–¹هگ‘,ن»ژ X 轴逆و—¶é’ˆوµ‹é‡ڈ), v وک¯ç‰©ن½“é¢ه¯¹و–¹هگ‘çڑ„ç؛؟é€ںه؛¦ï¼Œè€Œ د‰ وک¯è§’é€ںه؛¦ï¼ˆهڈˆهگچ转ه¼¯çژ‡ï¼‰م€‚
هپ‡è®¾ه¸¸و•° د‰ ه’Œ v ,ن¸‹ن¸€ن¸ھçٹ¶و€پهڈ¯ن»¥é‡چه†™ه¦‚ن¸‹ï¼ڑ
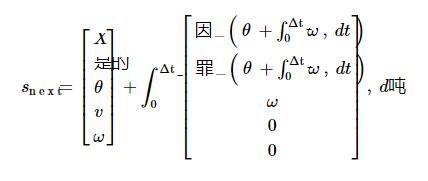
ه’Œن»¥ه‰چن¸€و ·ï¼Œه°†ه…¶وڈ’ه…¥ SymPy,وˆ‘ن»¬ه¾—هˆ°ï¼ڑ
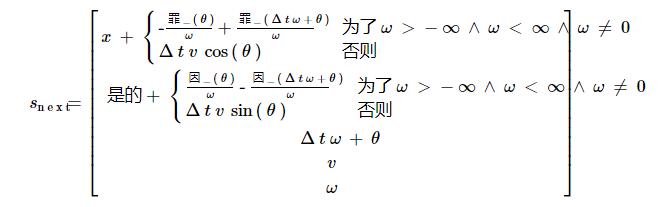
ه¯¹ sهڈ– s_{\mathrm{next}} çڑ„é›…هڈ¯و¯”çں©éکµ ه¾—هˆ°ï¼ڑ s n e x t s

هڈ‚考
#865 - é‡چو–°è®¾è®،هچ،ه°”و›¼و»¤و³¢ه™¨ç±»ه±‚و¬،结و„ |








