| еҰӮдҪ•еҗҜеҠЁе Ҷж Ҳ
жҢүз…§SVL д»ҝзңҹеҷЁ дёӯзҡ„иҜҙжҳҺејҖе§Ӣд»ҝзңҹгҖӮ жӯӨеӨ–пјҢиҰҒдёәжӯӨжј”зӨәй…ҚзҪ® LGSVLпјҡ
- ең°еӣҫпјҡдҪҝз”ЁжӯӨ ең°еӣҫй“ҫжҺҘ
- иҪҰиҫҶпјҡйҖүжӢ© ROS2 native жЎҘжўҒзұ»еһӢ并е°ҶеҶ…е®№зІҳиҙҙ AutowareAuto/src/launch/autoware_demos / config / svl/avp-sensors.json еҲ° Sensors ж–Үжң¬жЎҶдёӯ
- д»ҝзңҹпјҡеңЁ General йҖүйЎ№еҚЎдёӯпјҢ Select Cluster = Local Machine 并еҸ–ж¶ҲйҖүдёӯд»»дҪ•жЎҶгҖӮ еңЁ Map & Vehicles йҖүйЎ№еҚЎдёӯпјҢзЎ®дҝқеҸ–ж¶ҲеӢҫйҖү Run simulation in interactive mode гҖӮ еңЁ Traffic йҖүйЎ№еҚЎдёӯпјҢеҸ–ж¶ҲйҖүдёӯжүҖжңүйҖүжӢ©гҖӮ йҖүйЎ№еҚЎ Weather ж— е…ізҙ§иҰҒ
1еҸ·иҲӘз«ҷжҘј
# жҢүз…§дёҠйқўзҡ„иҜҙжҳҺеҗҜеҠЁ sim дҪҶдёҚиҰҒејҖиҪҰзҰ»ејҖд»ҘзЎ®дҝқжҲ‘们еҸҜд»Ҙе®ҡдҪҚиҮӘе·ұ
# 然еҗҺеҗҜеҠЁ RViz2 иҝӣиЎҢеҸҜи§ҶеҢ–
> ade иҝӣе…Ҙ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 еҗҜеҠЁ autoware_auto_launch autoware_auto_visualization.launch.py |
2еҸ·иҲӘз«ҷжҘј
> ade иҝӣе…Ҙ
ade$ source /opt/AutowareAuto/setup.bash
ade$ stdbuf -o L ros2 еҗҜеҠЁ autoware_demos avp_sim.launch.py |
йңҖиҰҒдёҠйқўзҡ„е‘Ҫд»ӨпјҢеӣ дёә ROS дёӯзҡ„й»ҳи®Өи®ҫзҪ®жҳҜд»… еңЁзј“еҶІеҢәе·Іж»Ўж—¶ stdbuf иҫ“еҮәиЎҢгҖӮ stdout жӯӨе‘Ҫд»Өжӣҙж”№иҜҘи®ҫзҪ®д»ҘдҪҝз”Ёиҫ“еҮәжҜҸдёҖиЎҢзҡ„вҖңиЎҢзј“еҶІеҢәвҖқпјҢжҸҗдҫӣжӣҙеӨҡи°ғиҜ•дҝЎжҒҜгҖӮ
3еҸ·иҲӘз«ҷжҘј
> ade иҝӣе…Ҙ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 topic echo /planning/trajectory |
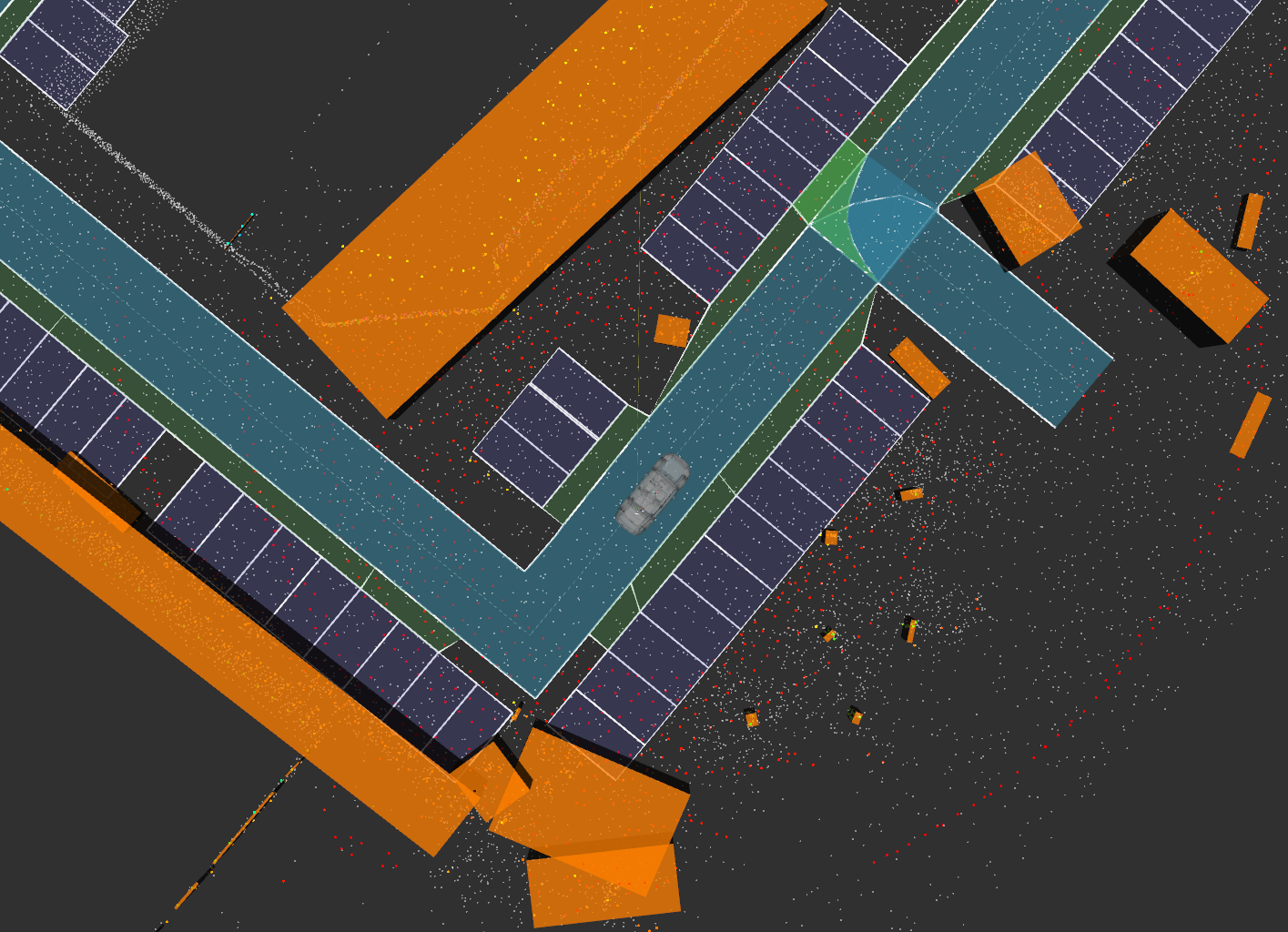
е°Ҷ LGSVL дёҠзҡ„иҪҰиҫҶ移еҠЁеҲ°еӣҫдёӯжүҖзӨәзҡ„дҪҚзҪ®гҖӮ иҝҷжҳҜ AutonomouStuff еӨ§жҘјеүҚй—ЁеӨ–дёүдёӘеҒңиҪҰдҪҚеүҚеҒңиҪҰеңәйҒ“и·ҜдёҠзҡ„вҖңжҺҘйҖҒеҢәвҖқгҖӮ
ејҖе§Ӣе§ҝеҠҝ
еңЁйҖүжӢ©зӣ®ж Үд№ӢеүҚпјҢжӮЁйңҖиҰҒеҲқе§ӢеҢ–жң¬ең°еҢ–гҖӮ иҰҒеҲҮжҚўеҲ° rviz зӘ—еҸЈпјҢиҜ·еҚ•еҮ» 2D Pose Estimate йЎ¶йғЁзҡ„жҢүй’®пјҢ然еҗҺеҚ•еҮ»иҪҰиҫҶеҪ“еүҚеңЁең°еӣҫдёӯзҡ„еӨ§иҮҙдҪҚзҪ®е№¶жІҝиҪҰиҫҶеүҚиҝӣж–№еҗ‘жӢ–еҠЁгҖӮ жӮЁеҸҜд»ҘйҖҡиҝҮи·іиҪ¬еҲ°ж–°дҪҚзҪ®зҡ„иҪҰиҫҶжЁЎеһӢд»ҘеҸҠдёҺйқҷжҖҒжҝҖе…үйӣ·иҫҫең°еӣҫеҢ№й…Қзҡ„е®һж—¶жҝҖе…үйӣ·иҫҫжү«жҸҸжқҘйӘҢиҜҒиҪҰиҫҶжҳҜеҗҰе·Іе®ҡдҪҚгҖӮ
жҺҘдёӢжқҘпјҢиҰҒд»ҘеӣҫеҪўж–№ејҸйҖүжӢ©еҒңиҪҰдҪҚпјҢиҜ·еҚ•еҮ» дёӯзҡ„ 2D Nav Goal жҢүй’® rviz пјҢеҚ•еҮ»зӣ®ж ҮдҪҚзҪ®пјҢ然еҗҺжІҝзӣ®ж ҮиҲӘеҗ‘ж–№еҗ‘жӢ–еҠЁгҖӮ
пјҲеҸҜйҖүпјүд»Ҙзј–зЁӢж–№ејҸеҸ‘йҖҒзӣ®ж ҮдҪҚзҪ®/ж Үйўҳпјҡ
4еҸ·иҲӘз«ҷжҘј
> ade иҝӣе…Ҙ
ade$ ros2 topic pub /planning/goal_pose geometry_msgs/msg/PoseStamped '{header: {frame_id: "map"}, е§ҝеҠҝ: {дҪҚзҪ®: {x: -96.46856384277344, y: 58.39532775878906}, ж–№еҗ‘: {z: 0.42554035782814026, w : 0.9049394130706787}}'} --once |
еҰӮжһңжӮЁжғіеҗ‘еҗҺеҒңиҪҰпјҢиҜ·еҸ‘йҖҒпјҡ
> ade иҝӣе…Ҙ
ade$ ros2 topic pub /planning/goal_pose geometry_msgs/msg/PoseStamped '{header: {frame_id: "map"}, е§ҝеҠҝ: {дҪҚзҪ®: {x: -98.56259155273438, y: 60.99168395996094}, ж–№еҗ‘: {z: -0.42844402469653825, w: 0.9035683248663778}}'} --once |
йӘҢиҜҒ Behavior Planner жҳҜеҗҰжҺҘ收еҲ°жқҘиҮӘ Global Path зҡ„и·Ҝз”ұ
еңЁз»Ҳз«Ҝ 2 дёҠпјҢжӮЁеә”иҜҘзңӢеҲ°д»ҘдёӢж¶ҲжҒҜиҫ“еҮәпјҡ
| [behavior_planner_node_exe-19] [INFO] [planning.behavior_planner_node]пјҡ收еҲ°зҡ„и·Ҝзәҝ |
йӘҢиҜҒ Lane Planner е’Ң Parking Planner жҳҜеҗҰиў« Behavior Planner и°ғз”Ё
еңЁз»Ҳз«Ҝ 2 дёҠпјҢжӮЁеә”иҜҘзңӢеҲ°д»ҘдёӢж¶ҲжҒҜиҫ“еҮәпјҡ
[behavior_planner_node_exe-19] [INFO] [planning.behavior_planner_node]пјҡеҸ‘йҖҒеҒңиҪҰиҪЁиҝ№еҠЁдҪңзӣ®ж Ү
[behavior_planner_node_exe-19] [INFO] [planning.behavior_planner_node]пјҡд»Һ规еҲ’еҷЁжҺҘ收еҲ°зҡ„иҪЁиҝ№ |
йӘҢиҜҒ Behavior Planner жҳҜеҗҰдёә MPC иҫ“еҮәиҪЁиҝ№д»ҘйҒөеҫӘ
еңЁ 3 еҸ·иҲӘз«ҷжҘјпјҢжӮЁеә”иҜҘдјҡзңӢеҲ°жқҘиҮӘиЎҢдёә规еҲ’еҷЁзҡ„иҪЁиҝ№ж¶ҲжҒҜгҖӮ
иҜ·еҸӮйҳ…дёӢйқўзҡ„зӨәдҫӢ
ade$ ros2 topic echo /planning/trajectory
1617078146.280549 [0] ros2: using network interface enp3s0 (udp/192.168.0.113) д»»ж„ҸйҖүжӢ©иҮӘпјҡenp3s0, docker0
---
ж Үйўҳпјҡ
йӮ®зҘЁпјҡ
з§’пјҡ1617077481
зәіз§’пјҡ563900928
frame_idпјҡең°еӣҫ
иҰҒзӮ№пјҡ
- time_from_startпјҡ
з§’пјҡ0
зәіз§’пјҡ0
xпјҡ-60.46516418457031
y: 82.08631896972656
ж Үйўҳпјҡ
зңҹе®һпјҡ-0.338379830121994
еӣҫзүҮпјҡ0.9410096406936646
зәөеҗ‘йҖҹеәҰ_mpsпјҡ2.777777910232544
жЁӘеҗ‘йҖҹеәҰ_mpsпјҡ0.0
еҠ йҖҹеәҰ_mps2пјҡ0.0
heading_rate_rps: 0.0019613588228821754
front_wheel_angle_radпјҡ-0.009999978356063366
еҗҺиҪ®и§’еәҰпјҡ0.0
- time_from_startпјҡ
з§’пјҡ0
зәіз§’пјҡ228084512
xпјҡ-60.946189880371094
y: 81.67398071289062
ж Үйўҳпјҡ
зңҹе®һпјҡ0.3368988037109375
еӣҫзүҮпјҡ-0.9415408372879028
зәөеҗ‘йҖҹеәҰ_mpsпјҡ2.777777910232544
жЁӘеҗ‘йҖҹеәҰ_mpsпјҡ0.0
еҠ йҖҹеәҰ_mps2пјҡ0.0
heading_rate_rps: 0.0
front_wheel_angle_rad: 9.720058005768806e-05
еҗҺиҪ®и§’еәҰпјҡ0.0 |
|








