> ه…‰ç›ک ~/adehome
> هچ·و›² https://autoware-auto.s3.us-east-2.amazonaws.com/rosbag2/rosbag2-astuff-1-lidar-only.tar.gz | 焦و²¹ |
> cd ~/adehome/AutowareAuto
> ade --rc .aderc-lgsvl ه¼€ه§‹ --update --enter |
> و؛گ /opt/AutowareAuto/setup.bash
> ros2 هگ¯هٹ¨ autoware_demos وœ¬هœ°هŒ–_rosbag.launch.py |
| > ros2 هگ¯هٹ¨-s autoware_demos وœ¬هœ°هŒ–_rosbag.launch.py |
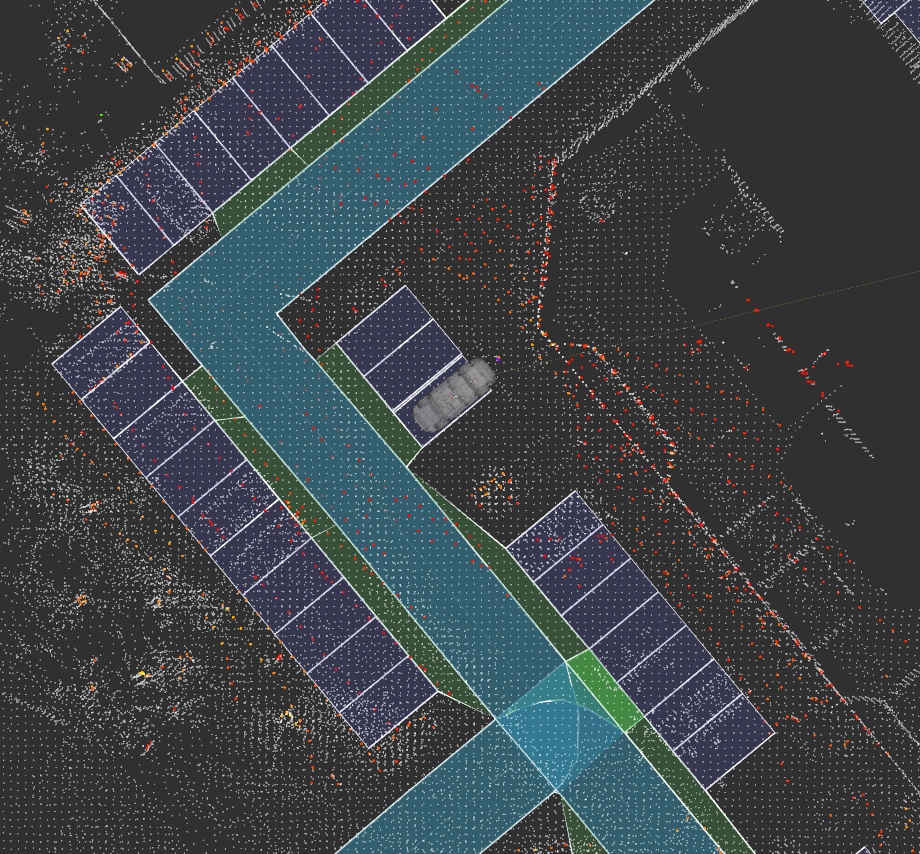
5.وœ¬هœ°هŒ–و¼”ç¤؛هگ¯هٹ¨و–‡ن»¶ن½؟用该 load_initial_pose_from_parameters هڈ‚و•°è®¾ç½® NDT وœ¬هœ°هŒ–èٹ‚点ن¸çڑ„هˆه§‹ن½چه§؟م€‚ 车辆ه؛”ه¼€هˆ°هپœè½¦ن½چ,然هگژ继ç»هپœè½¦م€‚ هپœè½¦هگژ,车辆ه؛”离ه¼€هپœè½¦ن½چ,然هگژè؟”ه›èµ·ç‚¹م€‚