тюеSVLСИГУ«░тйЋ/тЏъТћЙСИђСИфУйеУ┐╣
Autoware.Auto УЃйтцЪУ«░тйЋУи»тЙёуѓ╣тѕ░уБЂуЏўуџёУи»тЙё№╝їуёХтљјтіаУййт╣Хт░ЮУ»ЋжЂхтЙфУ»ЦУи»тЙёсђѓ У»ЦТ╝ћуц║у╗ЊтљѕС║єтцџСИфтГљу│╗у╗Ъ№╝їтїЁТІг NDT т«џСйЇ тњї 3D ТёЪуЪЦтаєТаѕ сђѓ УдЂТхІУ»ЋТГцтіЪУЃй№╝їУ»иТЅДУАїС╗ЦСИІТЊЇСйю№╝џ
тЁѕтє│ТЮАС╗Х
С╗ЦСИІУ»┤ТўјтЂЄУ«ЙТѓетюе ADE СИГУ┐љУАїТ╝ћуц║сђѓ ТюЅтЁ│У«Йуй« ADE уј»тбЃуџёУ»┤Тўј№╝їУ»итЈѓжўЁ Сй┐уће ADE т«ЅУБЁ сђѓ ТюЅтЁ│тюеТ▓АТюЅ ADE уџёТЃЁтєхСИІУ«Йуй« Autoware.Auto уџёУ»┤Тўј№╝їУ»итЈѓжўЁ Installation w/o ADE сђѓ тдѓТъютюе ADE С╣ІтцќУ┐љУАї№╝їУ»иТЏ┐ТЇб source /opt/AutowareAuto/setup.bash СИ║ source /<path_to_your_autoware_folder>/install/setup.bash .
ТїЄуц║
1. Сй┐уће Lexus RX 450h тњї AutonomouStuff тЂюУйдтю║тю░тЏЙ тљ»тіе SVL ТеАТІЪтЎесђѓ ТГцТЌХСИЇУдЂт╝ђтДІТеАТІЪсђѓ
2. тюеТќ░у╗ѕуФ»СИГ№╝џ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 тљ»тіе autoware_demos У«░тйЋreplay_planner_demo.launch.py |
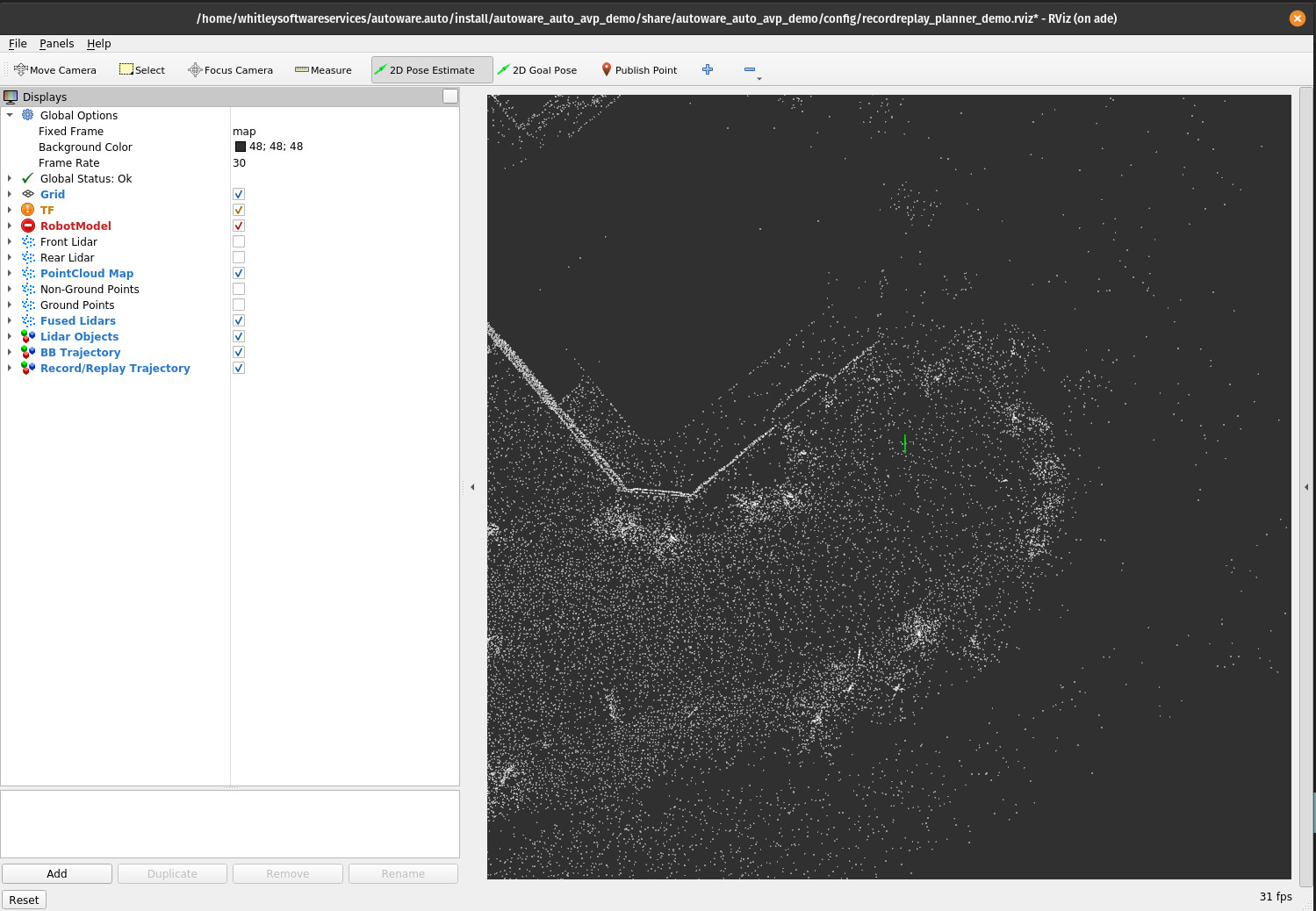
3. тюе rviz СИГ№╝їСй┐ућеуѓ╣С║ЉСйюСИ║тЈѓУђЃ№╝їтюе AutonomouStuff тЂюУйдтю║тю░тЏЙСИГт«џСйЇУйдУЙєуџёућЪТѕљуѓ╣сђѓ
SVL жЄЇућЪуѓ╣ Сй┐ућеРђю2D Pose EstimateРђЮтиЦтЁи rviz СИ║т«џСйЇТЈљСЙЏтѕЮтДІтД┐ТђЂС╝░У«Асђѓ
тѕЮтДІтД┐ті┐С╝░У«А
4. Сй┐уће SVL Web уЋїжЮб№╝їт╝ђтДІТеАТІЪсђѓ СИђТЌдт«џСйЇт╝ђтДІС╝░У«АУйдУЙєуџёСйЇуй«№╝їУДєтЏЙ rviz т░▒С╝џС╗јУйдУЙєСИіУи│т╝ђсђѓ т░єУйдУЙєуџёУДєтЏЙжЄЇТќ░т▒ЁСИГсђѓ
5. тюеТќ░у╗ѕуФ»СИГ№╝џ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 action send_goal /planning/recordtrajectory autoware_auto_planning_msgs/action/RecordTrajectory "{record_path: "/tmp/path"}" --feedback |
6. тюе SVL СИГ№╝їжЕЙжЕХУйдУЙєтЏЏтцёУАїжЕХС╗ЦУ«░тйЋУи»тЙёсђѓ
7. т«їТѕљтйЋтѕХтљј№╝їУйгтѕ░У┐љУАї ros2 action send_goal тЉйС╗цуџёу╗ѕуФ»т╣Хуѓ╣тЄ╗ CTRL+C тЂюТГбтйЋтѕХсђѓ
8. тюе SVL СИГ№╝їуѓ╣тЄ╗ F12 тЈ»т░єУййтЁижЄЇТќ░т▒ЁСИГС║јж╗ўУ«цжЄЇућЪуѓ╣сђѓ
9. жђџУ┐ЄТїЅСИІТГБтюеУ┐љУАї CTRL+C уџёу╗ѕуФ» ТЮЦтЂюТГб Autoware таєТаѕсђѓ ros2 launch autoware_demosrecordreplay_planner_demo.launch.py
10. жЄЇтцЇТГЦжфц 2 тњї 3сђѓ
11. УдЂжЄЇТњГУ«░тйЋуџёУи»тЙё№╝џ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 action send_goal /planning/replaytrajectory autoware_auto_planning_msgs/action/ReplayTrajectory "{replay_path: "/tmp/path"}" --feedback |
12. тйЊУйдУЙєтѕ░УЙЙтЏъТћЙУйеУ┐╣уџёуЏ«ТаЄТЌХ№╝їУДётѕњтЎеС╝џУЄфтіетЂюТГбт╣ХУЙЊтЄ║ status::SUCCEED тѕ░ТѓеУ┐љУАї ros2 action send_goal тЉйС╗цуџёу╗ѕуФ»сђѓ
ТѓетЈ»С╗ЦжђџУ┐ЄУ░ЃТЋ┤recordreplay_planner.param.yaml СИГуџётЈѓТЋ░ТЮЦС┐«Тћ╣у╗ЊТЮЪТЮАС╗Х сђѓ тйЊТ╗АУХ│С╗ЦСИІСИцСИфТЮАС╗ХТЌХ№╝їУ«АтѕњУђЁу╗ѕТГбУ«Атѕњ№╝џ
goal_distance_threshold_m nav_base :тИДСИјтЏъТћЙУйеУ┐╣СИГТюђтљјСИђСИфуѓ╣ С╣ІжЌ┤уџёУиЮуд╗жўѕтђ╝
goal_angle_threshold_rad nav_base :тИДСИјтЏъТћЙУйеУ┐╣СИГТюђтљјСИђСИфуѓ╣ С╣ІжЌ┤уџёУѕфтљЉУДњжўѕтђ╝
ТјДтѕХтЎежђЅжА╣
ж╗ўУ«цТЃЁтєхСИІ№╝їСИіУ┐░тљ»тіетЉйС╗цт░єСй┐уће MPC ТјДтѕХтЎеУ┐љУАїУДётѕњтЎесђѓ ТѓетЈ»С╗ЦжђџУ┐ЄУ┐љУАїС╗ЦСИІтЉйС╗цТЮЦУ┐љУАїу║»У┐йУИфТјДтѕХтЎеУђїСИЇТў» MPC ТјДтѕХтЎе№╝ї
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 тљ»тіе autoware_demos У«░тйЋreplay_planner_demo.launch.pyРђІРђІ run_pure_pursuit:=True |
У»иТ│еТёЈ№╝їу║»У┐йУИфТјДтѕХтЎеТЏ┤тјЪтДІ№╝їт╣ХСИћСИЇС╝џтЂюТГбУи»тЙёСИітЈ»УЃйт»╝УЄ┤уб░Тњъуџёт»╣У▒А тЙфуј»ТњГТћЙ
УдЂтљ»ућеУйеУ┐╣тЙфуј»№╝їУ»иС┐«Тћ╣ recordreplay_planner.param.yaml №╝џ
- У«Йуй« loop_trajectory СИ║ True
- У«Йуй« loop_max_gap_m СИ║т«їТѕљтЙфуј»уџёУхиуѓ╣тњїу╗ѕуѓ╣С╣ІжЌ┤тЁЂУ«ИуџёТюђтцДжЌ┤жџЎ№╝ѕу▒│№╝Ѕ№╝їСЙІтдѓ 10 .
У»иТ│еТёЈ№╝їТюђтЦйтюеУйдУЙєС╗ЇтюеУАїжЕХТЌХтЂюТГбтйЋтѕХтЉйС╗цсђѓ тљдтѕЎ№╝їУйдУЙєтЈ»УЃйС╝џтюеУйеУ┐╣уџёТюФуФ»тЂюТГб№╝їУђїСИЇТў»уД╗тіетѕ░Ухиуѓ╣сђѓ ТюђтЦйу╝ќУЙЉС┐ЮтГўуџёУи»тЙёТќЄС╗Хт╣ХС╝ўтїќтЁ│УіѓтцёуџёжђЪт║дтњїтД┐ті┐сђѓ
|








