ТдѓУ┐░
ТюгТ╝ћуц║ТЌетюеУДБжЄіУ┐љУАїС╗ЦСИІТёЪуЪЦУіѓуѓ╣уџёСИђУѕгУ┐ЄуеІсђѓ Autoware.Auto 3D ТёЪуЪЦтаєТаѕућ▒СИђу╗ёУ«Ау«ЌтњїтЈЉтИЃт»╣У▒АУЙ╣уЋїТАєТЅђт┐ЁжюђуџёУіѓуѓ╣у╗ёТѕљсђѓ У┐ЎТаитЂџуџёТюђт░ЈтаєТаѕТў»№╝џ
- point_cloud_filter_transform_node №╝џт░єУЙЊтЄ║УйгТЇб velodyne_node СИ║тЁгтЁ▒тИДсђѓ ТќЄТАБтЈ»С╗ЦтюеУ┐ЎжЄїТЅЙтѕ░№╝џ point_cloud_filter_transform_nodes сђѓ
- ray_ground_classifier_node №╝џт»╣Т┐ђтЁЅжЏиУЙЙуѓ╣У┐ЏУАїтѕєу▒╗С╗ЦТїЄуц║т«ЃС╗гт▒ъС║јтю░жЮбУ┐ўТў»жЮътю░жЮбсђѓ ТќЄТАБтЈ»С╗ЦтюеУ┐ЎжЄїТЅЙтѕ░№╝џ ray_ground_classifier сђѓ
- euclidean_cluster_node №╝џт░єжЮътю░жЮбуѓ╣УЂџу▒╗тѕ░т»╣У▒АТБђТхІСИГсђѓ ТќЄТАБтЈ»С╗ЦтюеУ┐ЎжЄїТЅЙтѕ░№╝џ euclidean_cluster сђѓ
У┐ўТюЅСИђС║ЏтЈ»жђЅУіѓуѓ╣№╝їТюгТЋЎуеІТюфС╗Іу╗Ї№╝їтЈ»ућеС║јТЅЕтЁЁтаєТаѕ№╝џ
- point_cloud_fusion №╝џт░єТЮЦУЄфтцџСИфТ║љуџёуѓ╣С║ЉУъЇтљѕтѕ░СИђТЮАТХѕТЂ»СИГсђѓ У┐ЎуЏ«тЅЇућеС║јт░єтЅЇтљјТ┐ђтЁЅжЏиУЙЙТЋ░ТЇ«УъЇтљѕтѕ░тЇЋСИфТХѕТЂ»ТхЂСИГсђѓ ТюгТЋЎуеІС╗ЁСй┐ућетЅЇТ┐ђтЁЅжЏиУЙЙТЋ░ТЇ«сђѓ тЈ»С╗ЦтюеТГцтцёТЅЙтѕ░ТќЄТАБ№╝џ point_cloud_fusion_nodes сђѓ
- voxel_grid_nodes №╝џУ┐ЎтЈ»ућеС║јжђџУ┐ЄСйЊу┤ауйЉТа╝УАеуц║т»╣уѓ╣С║ЉТЋ░ТЇ«У┐ЏУАїСИІжЄЄТаисђѓ ТюгТЋЎуеІСИЇТЅДУАїСИІжЄЄТаисђѓ ТќЄТАБтЈ»С╗ЦтюеУ┐ЎжЄїТЅЙтѕ░№╝џ voxel_grid_filter сђѓ
тљ»тіеТёЪуЪЦУіѓуѓ╣
тЁѕтє│ТЮАС╗Х
ТГцТ╝ћуц║тЂЄт«џТїЄС╗цтюе ADE уј»тбЃСИГУ┐љУАїсђѓ ТюЅтЁ│т«ЅУБЁуџёТЏ┤тцџС┐АТЂ»№╝їУ»итЈѓжўЁ т«ЅУБЁ ADE сђѓ Та╣ТЇ«жђЅТІЕућЪТѕљТЋ░ТЇ«уџёТеАт╝Ј№╝ї .aderc тЈ»УЃйжюђУдЂСй┐ућеСИЇтљїуџёТќЄС╗ХС╗ЦуА«С┐ЮжЁЇуй«С║єТГБуА«уџёуј»тбЃсђѓ
ућЪТѕљС╝аТёЪтЎеТЋ░ТЇ«
УдЂУ┐љУАїТёЪуЪЦтаєТаѕ№╝їжюђУдЂућЪТѕљС╝аТёЪтЎеТЋ░ТЇ«т╣Хт░єтЁХСИјуЏИт║ћуџёРђюТю║тЎеС║║уіХТђЂРђЮСИђУхитЈЉтИЃ№╝їУ»ЦРђюТю║тЎеС║║уіХТђЂРђЮућеС║јуА«т«џС╝аТёЪтЎеуЏИт»╣С║јУйдУЙєуџёСйЇуй«сђѓ ТюгУіѓС╗Іу╗ЇС║єт«ъуј░ТГцуЏ«уџёуџёСИЅуДЇСИЇтљїТќ╣Т│Ћ№╝џ
- У┐љУАїС╗┐уюЪтЎе
- жЄЇТћЙС╝аТёЪтЎеТЋ░ТЇ«
- У┐ъТјЦтѕ░уЅЕуљєС╝аТёЪтЎе
У┐љУАїС╗┐уюЪтЎе
1.Сй┐уће LGSVL жЁЇуй«УЙЊтЁЦ ADE№╝џ
| $ ade --rc .aderc-lgsvl т╝ђтДІ --update --enter |
2.У»итЈѓжўЁ Autoware.Auto ТЌЂУЙ╣уџёУ┐љУАї SVL С╗┐уюЪтЎе
3.тЈЉтИЃТю║тЎеС║║уіХТђЂТЈЈУ┐░№╝џ
| $ ade УЙЊтЁЦ ade$ ros2 У┐љУАї robot_state_publisher robot_state_publisher /opt/AutowareAuto/share/lexus_rx_450h_description /urdf/lexus_rx_450h.urdf |
жЄЇТћЙС╝аТёЪтЎеТЋ░ТЇ«
1.СИІУйй PCAP ТќЄС╗Х Dual VLP-16 Hi-Res pcap ТќЄС╗Х сђѓ
2.Сй┐ућетИдТюЅжбЮтцќТаЄт┐Ќуџёж╗ўУ«цУёџТюгУЙЊтЁЦ ADE С╗ЦТГБуА«У┐љУАї RViz
| $ ade --rc .aderc т╝ђтДІ --update --enter |
3.т░єСИІУййуџёТќЄС╗ХуД╗тіетѕ░Тѓеуџё adehome ТќЄС╗Хтц╣СИГсђѓ
4.Сй┐ућеС╗ЦСИІтЉйС╗цжЄЇТњГТќЄС╗Х udpreplay №╝џ
$ ade УЙЊтЁЦ
ade$ udpreplay -r -1 route_small_loop_rw.pcap |
5.тљ»тіетЅЇТ┐ђтЁЅжЏиУЙЙуџё velodyne_node №╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 У┐љУАї velodyne_nodes velodyne_cloud_node_exe --ros-args -p model:=vlp16 --remap __ns:=/lidar_front --params-file /opt/AutowareAuto/share/velodyne_nodes/param/vlp16_test.param.yaml |
6.тљ»тіетљјТ┐ђтЁЅжЏиУЙЙуџё velodyne_node №╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 У┐љУАї velodyne_nodes velodyne_cloud_node_exe --ros-args -p model:=vlp16 --remap __ns:=/lidar_rear --params-file /opt/AutowareAuto/share/velodyne_nodes/param/vlp16_test_rear.param.yaml |
7.тЈЉтИЃТю║тЎеС║║уіХТђЂТЈЈУ┐░№╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 У┐љУАї robot_state_publisher robot_state_publisher /opt /AutowareAuto/share/lexus_rx_450h_description /urdf/lexus_rx_450h_pcap.urdf |
У┐ъТјЦтѕ░уЅЕуљєС╝аТёЪтЎе
1.Сй┐ућетИдТюЅжбЮтцќТаЄт┐Ќуџёж╗ўУ«цУёџТюгУЙЊтЁЦ ADE С╗ЦТГБуА«У┐љУАї RViz
| $ ade --rc .aderc т╝ђтДІ --update --enter -- --net=host --privileged |
2.СИ║ТГц№╝їУ»иТЏ┤Тќ░ velodyne_node тЈѓТЋ░ТќЄС╗ХСИГуџё IP тю░тЮђтњїуФ»тЈБтЈѓТЋ░№╝їуёХтљјтљ»тіеУ»ЦУіѓуѓ╣№╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 У┐љУАї velodyne_nodes velodyne_ cloud_node_exe --ros-args -p model:=vlp16 --remap __ns:=/lidar_front --params-file /opt/AutowareAuto/share/velodyne_nodes/param/ vlp16_test.param.yaml |
тљ»тіетЈ»УДєтїќ
rviz2 тЈ»ућеС║јтюетЈЉтИЃТЌХтЈ»УДєтїќТёЪуЪЦТЋ░ТЇ«сђѓ УдЂтљ»тіетЈ»УДєтїќтиЦтЁи№╝їУ»иТЅЊт╝ђСИђСИфТќ░у╗ѕуФ»№╝їуёХтљј№╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ rviz2 -d /opt/AutowareAuto/share/autoware_auto _examples/rviz2/autoware_perception_stack.rviz |
rviz жЁЇуй«ТўЙуц║С║єТюгТЋЎуеІСИГуџёТЅђТюЅСИ╗жбўсђѓ тйЊУіѓуѓ╣тљ»тіеТЌХ№╝їт«ЃС╗гт░єТўЙуц║тюе rviz СИГсђѓ тЈ»С╗ЦжђЅСИГтњїтЈќТХѕжђЅСИГСИ╗жбўтљЇуД░ТЌЂУЙ╣уџётцЇжђЅТАєС╗ЦтѕЄТЇбтЈ»УДєтїќуџёТёЪуЪЦУЙЊтЄ║сђѓ
тљ»тіеТёЪуЪЦУіѓуѓ╣
1.тљ»тіе point_cloud_filter_transform_node Уіѓуѓ╣сђѓ У»ЦУіѓуѓ╣т░єуѓ╣С║ЉС╗ј УйгТЇб velodyne_node СИ║тЁгтЁ▒ТАєТъХсђѓ тюеТќ░у╗ѕуФ»СИГ№╝їТЅДУАї№╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 run point_cloud_filter_transform_nodes point_cloud _ filter_transform_node_exe --ros-args --remap __ns:=/lidar_front --params-file /opt/AutowareAuto/share/point_cloud_filter_transform _ nodes/param/vlp16_sim_lexus_filter_transform.param.yaml --remap __node:=filter_transform_vlp16_front --remap points_in:= / lidar_front/points_xyzi |
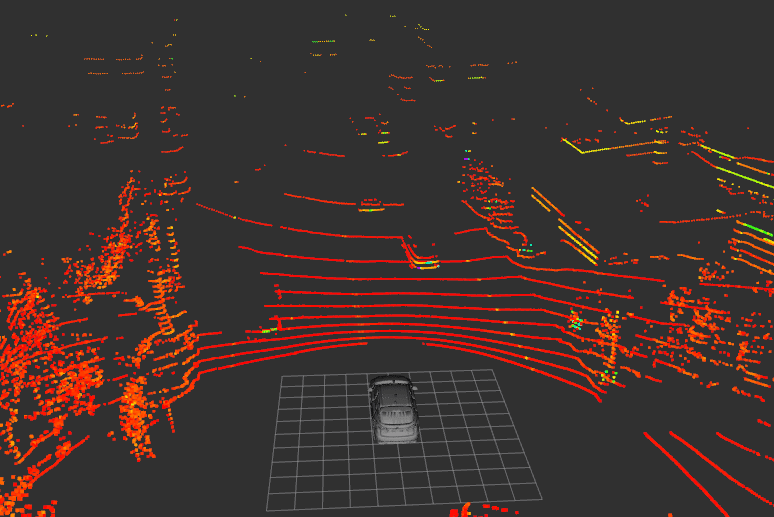
Autoware.Auto УйгТЇбуѓ╣т┐ФуЁД
2.тљ»тіе ray_ground_classifier_node Уіѓуѓ╣сђѓ У»ЦУіѓуѓ╣Та╣ТЇ«уѓ╣С║Љуѓ╣Тў»тю░жЮбУ┐ўТў»жЮътю░жЮбт»╣уѓ╣С║Љуѓ╣У┐ЏУАїтѕєу▒╗сђѓ тюеТќ░у╗ѕуФ»СИГ№╝їТЅДУАї№╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 run point_cloud_filter_transform_nodes point_cloud_filter_transform_node_exe --ros-args --remap __ns:=/lidar_front --params-file /opt/AutowareAuto/share/point_cloud_filter_ transform_nodes/param/vlp16_sim_lexus_filter_t ransform.param.yaml --remap __node:=filter_transform_vlp16_front --remap points_in := /lidar_front/points_xyzi |
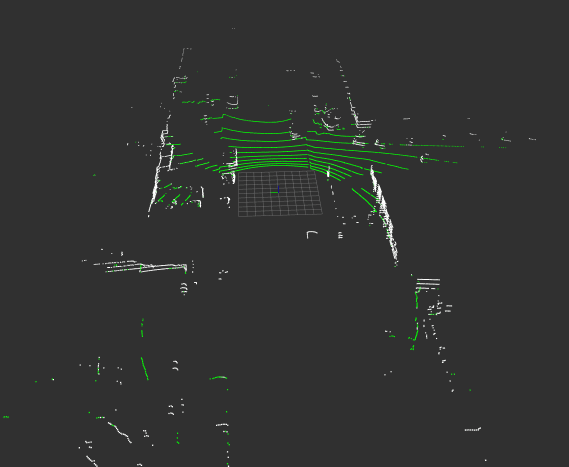
Autoware.Auto тЁЅу║┐тю░жЮбТ╗цжЋют┐ФуЁД
3.тљ»тіе euclidean_cluster_node Уіѓуѓ╣сђѓ У»ЦУіѓуѓ╣т░єжЮътю░жЮбуѓ╣УЂџжЏєтѕ░т»╣У▒АСИГ№╝їт╣ХтЈ»жђЅТІЕтЈЉтИЃУЙ╣уЋїТАєТѕќтЄИтцџУЙ╣тйбТБ▒жЋюсђѓ т»╣С║јтЈЉтИЃУЙ╣уЋїТАє№╝їтюеТќ░у╗ѕуФ»СИГ№╝їТЅДУАї№╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 У┐љУАї euclidean_cluster_nodes euclidean_ cluster_node_exe --ros-args --params-file /opt/AutowareAuto/share/euclidean_cluster_nodes/ param /vlp16_lexus_cluster.param.yaml --remap points_in:=/points_nonground |
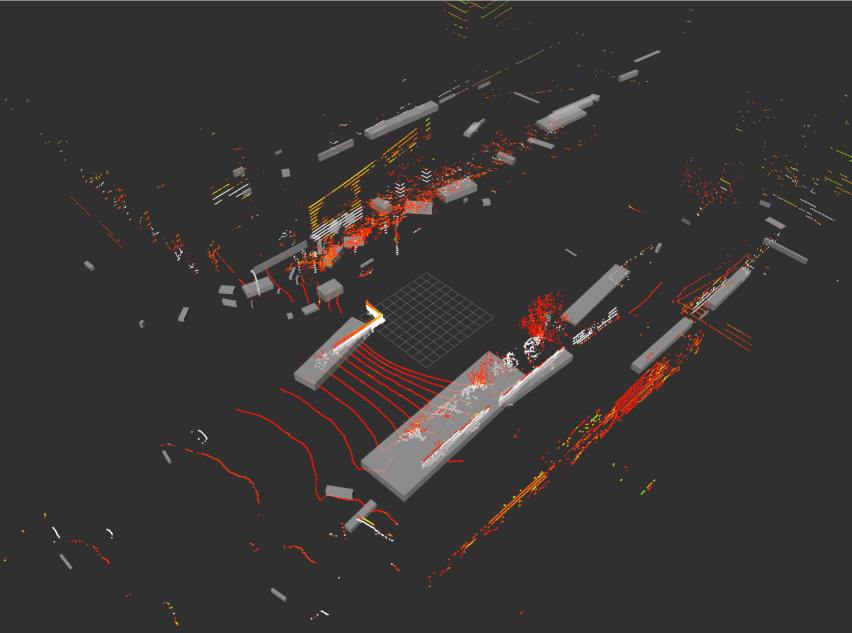
Autoware.AutoУЙ╣уЋїТАєтѕєтЅ▓т┐ФуЁД
ТѕќУђЁ№╝їС╗јТгДтЄажЄїтЙЌУЂџу▒╗у«ЌТ│ЋСИГтЈЉтИЃтЄИтцџУЙ╣тйбТБ▒жЋюсђѓ тюеТќ░у╗ѕуФ»СИГ№╝їТЅДУАї№╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 У┐љУАї euclidean_cluster_nodes euclidean _ cluster_node_exe --ros-args --params-file /opt/AutowareAuto/share/euclidean_cluster_nodes / param/vlp16_lexus_cluster_as_polygon.param.yaml --remap points_in:=/points_nonground |
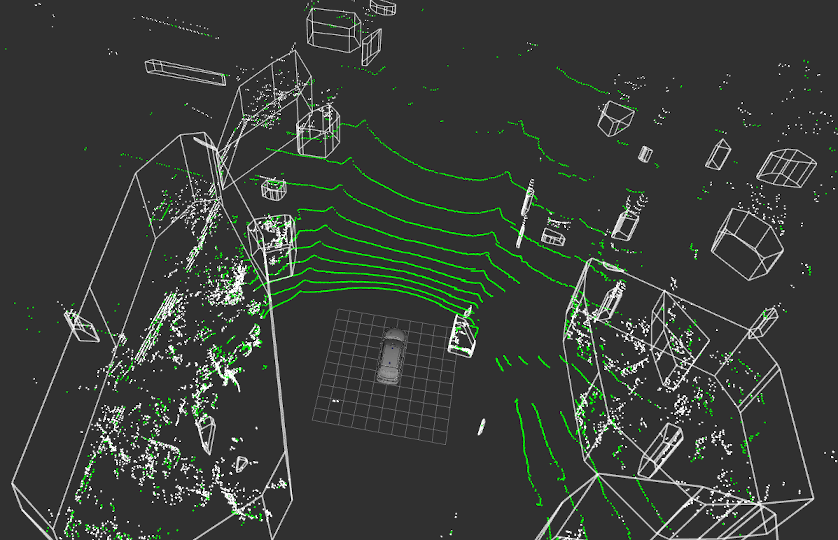
Autoware.AutoтЄИтцџУЙ╣тйбТБ▒жЋютѕєтЅ▓т┐ФуЁД
СЙ┐ТЇитљ»тіеТќЄС╗Х
СИ║С║єу«ђтїќтљ»тіеУ┐ЎС║ЏУіѓуѓ╣уџёУ┐ЄуеІ№╝їтГўтюеСИђСИфТќ╣СЙ┐уџётљ»тіеТќЄС╗Х№╝їт«ЃтЈ»С╗Ц robot_state_publisher Сй┐ућетЇЋСИфтЉйС╗цтљ»тіеТёЪуЪЦтаєТаѕуџётЁХСйЎжЃетѕєсђѓ УдЂтљ»тіеТёЪуЪЦтаєТаѕ№╝їУ»иСй┐ућеС╗ЦСИІтљ»тіеТќЄС╗Х№╝џ
PCAP С╝аТёЪтЎеТЋ░ТЇ«
угћУ«░
тдѓТъюТѓеТ▓АТюЅ PCAP ТќЄС╗ХуџётЅ»Тюг№╝їУ»итЈѓжўЁСИіУ┐░ТГЦжфцС╗ЦжЄЇТћЙС╝аТёЪтЎеТЋ░ТЇ«сђѓ
1.Сй┐ућеС╗ЦСИІтЉйС╗цжЄЇТњГТќЄС╗Х udpreplay №╝џ
$ ade УЙЊтЁЦ
ade$ udpreplay -r -1 route_small_loop_rw.pcap |
2.тюетЈдСИђСИфу╗ѕуФ»СИГ тљ»тіетЅЇТ┐ђтЁЅжЏиУЙЙуџё velodyne_node №╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 У┐љУАї velodyne_nodes velodyne_cloud_node_exe --ros-args -p model:=vlp16 --remap __ns:=/lidar_front --params-file /opt/AutowareAuto/share/velodyne_nodes/param/ vlp16_test.param.yaml |
3.тюетЈдСИђСИфу╗ѕуФ»СИГ тљ»тіетљјТ┐ђтЁЅжЏиУЙЙуџё velodyne_node №╝џ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 У┐љУАї velodyne_nodes velodyne_cloud_node_exe --ros-args -p model:=vlp16 --remap __ns:=/lidar_rear --params-file /opt/AutowareAuto/share/velodyne_nodes/param/ vlp16_test_rear.param.yaml |
4.УЙЊтЁЦ ADE т╣ХУ┐љУАїтљ»тіеТќЄС╗Х
тЈЉтИЃтЄИтцџУЙ╣тйбТБ▒ТЪ▒ТЮЦТЈЈУ┐░уЅЕСйЊуџёуЕ║жЌ┤СйЇуй«сђѓ
У┐ЏтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 тљ»тіе autoware_demos Т┐ђтЁЅжЏиУЙЙ _тцџУЙ╣тйб_ТБ▒жЋю_pcap.launch.py |
ТѕќУђЁ№╝їтЈЉтИЃућеС║јТЈЈУ┐░т»╣У▒АуЕ║жЌ┤СйЇуй«уџёУЙ╣уЋїТАєсђѓ
У┐ЏтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 тљ»тіе autoware_demos Т┐ђтЁЅжЏиУЙЙ_ bounding_boxes_pcap.launch.py |
SVL С╗┐уюЪтЎе
угћУ«░ тдѓТъю SVL С╗┐уюЪтЎети▓у╗ЈтюеУ┐љУАї№╝їУ»иУи│У┐ЄТГЦжфц 1сђѓ
1.У»итЈѓжўЁ Autoware.Auto ТЌЂУЙ╣уџёУ┐љУАї SVL С╗┐уюЪтЎе
2.УЙЊтЁЦ ADE т╣ХУ┐љУАїтљ»тіеТќЄС╗Х
3.тЈЉтИЃтЄИтцџУЙ╣тйбТБ▒ТЪ▒ТЮЦТЈЈУ┐░уЅЕСйЊуџёуЕ║жЌ┤СйЇуй«сђѓ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 тљ»тіе autoware_demos Т┐ђтЁЅжЏиУЙЙ_тцџУЙ╣тйб_ТБ▒жЋю_lgsvl.launch.py |
ТѕќУђЁ№╝їтЈЉтИЃућеС║јТЈЈУ┐░т»╣У▒АуЕ║жЌ┤СйЇуй«уџёУЙ╣уЋїТАєсђѓ
$ ade УЙЊтЁЦ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 тљ»тіе autoware_demos Т┐ђтЁЅжЏиУЙЙ_bounding_boxes_lgsvl.launch.py |
|








