| 
è‡ھهٹ¨ن»£ه®¢و³ٹ车
و¦‚è؟°
è‡ھهٹ¨ن»£ه®¢و³ٹ车 (AVP) و¼”ç¤؛ن½؟用 Autoware.Auto وڈگن¾›ن»£ه®¢و³ٹ车وœچهٹ،م€‚ ه®ƒوک¯ç”± Autoware وˆگه‘کن؛ژ 2020 ه¹´ه®çژ°çڑ„,هœ¨è؟™ç¯‡و–‡ç« ن¸وœ‰و›´è¯¦ç»†çڑ„وڈڈè؟°م€‚
ç›®و ‡وک¯ه¼•ه¯¼و±½è½¦è‡ھهٹ¨هپœهœ¨هپœè½¦هœ؛,ه¹¶é€ڑè؟‡و™؛能و‰‹وœ؛è‡ھهٹ¨è؟”ه›هˆ°ن¸ٹ/ن¸‹è½¦هŒ؛هںںم€‚
AVP و¼”ç¤؛ن½؟用 Autoware.Auto وڈگن¾›ن»¥ن¸‹هٹں能ï¼ڑ
- è‡ھهٹ¨ه°†و±½è½¦ن»ژ预ه®ڑن¹‰çڑ„ن¸‹ه®¢هŒ؛(ن¾‹ه¦‚هپœè½¦هœ؛ه…¥هڈ£ï¼‰ه¼€هˆ°ه¤–部系ç»ںوŒ‡ç¤؛çڑ„هپœè½¦ن½چم€‚
- ه°†و±½è½¦هپœهœ¨هپœè½¦ن½چ,ن»ژ该هپœè½¦ن½چ附è؟‘çڑ„车éپ“ه¼€ه§‹م€‚
- 驶ه‡؛هپœè½¦ن½چم€‚
- ه¼€è½¦هˆ°é¢„ه…ˆه®ڑن¹‰çڑ„وژ¥é€پهŒ؛(ن¾‹ه¦‚هپœè½¦هœ؛çڑ„ه‡؛هڈ£ï¼‰م€‚
- ه®çژ°ن¸ٹè؟°ç›®و ‡و—¶è‡ھهٹ¨هپœو¢éڑœç¢چ物م€‚
é‡چه¤چو¼”ç¤؛çڑ„وœ€ç®€هچ•و–¹و³•وک¯هœ¨ Simulation ن¸è؟گè،Œه®ƒم€‚ ç»™ه®ڑ适ه½“çڑ„ç،¬ن»¶ï¼Œه®ƒه½“然هڈ¯ن»¥هœ¨çژ°ه®ç”ںو´»ن¸é‡چه¤چ,ن¹ںهڈ¯ن»¥هœ¨ 物çگ†و¼”ç¤؛ ن¸è¯¦ç»†è¯´وکژم€‚
ه…ˆه†³و،ن»¶
è¦پè؟گè،Œو¤و¼”ç¤؛,需è¦پن»¥ن¸‹è¾“ه…¥ï¼ڑ
ه¦‚وœوŒ‰ç…§è¯´وکژ设置ن؛† SVL ن»؟çœںه™¨ ,هˆ™è؟™ن¸¤ن¸ھ组ن»¶ه؛”该هœ¨ ن¸‹çڑ„ن»؟çœںن¸ه¼€ç®±هچ³ç”¨ /opt/AutowareAuto/share/autoware_demos/data م€‚
ن»؟çœں
è¦پè؟گè،Œ LGSVL ن»؟çœںه™¨ï¼Œéœ€è¦پ NVIDIA وک¾هچ،م€‚ هڈ¯ن»¥هœ¨ و¤ه¤„ و‰¾هˆ°وœ‰ه…³è¦پو±‚çڑ„ه…¶ن»–ن؟،وپ¯م€‚
è؟™ن؛›وŒ‡ن»¤ه·²هœ¨ه¤ڑهڈ°وœ؛ه™¨ن¸ٹوˆگهٹںوµ‹è¯•ï¼Œè؟™ن؛›وک¯و¤ç±»وœ؛ه™¨çڑ„规و ¼ï¼ڑ
- Intel(R) Core(TM) i9-9900KF CPU @ 3.60GHz(16 ن¸ھè™ڑو‹ںه†…و ¸ï¼‰ï¼Œ64GB RAM
- NVIDIA GeForce RTX 2080 ن¸ژ 8 GB ه†…هک
è¦ه‘ٹ ه¦‚وœوœ؛ه™¨ه› هگŒو—¶è؟گè،Œن»؟çœںه’Œè‡ھهٹ¨é©¾é©¶ه †و ˆè€Œè؟‡è½½ï¼Œهˆ™é¢„è®،و€§èƒ½ن¼ڑن¸‹é™چم€‚ 请هڈ‚éک… ç¼؛ن¹ڈè®،算资و؛گ م€‚ ه»؛è®®هœ¨ن¸€هڈ°وœ؛ه™¨ن¸ٹè؟گè،Œ Simulator ه’Œ RViz2,هœ¨هڈ¦ن¸€هڈ°وœ؛ه™¨ن¸ٹè؟گè،Œ autoware ه †و ˆم€‚
设置ه’Œهگ¯هٹ¨
è؟گè،Œه’Œوژ§هˆ¶ن»؟çœں需è¦پن¸¤ن¸ھ独立çڑ„终端م€‚
设置
1.ه®‰è£… ADE م€‚
2.وژ¥ن¸‹و¥هœ¨ ADE ن¸و‰“ه¼€ 终端 1 ه¹¶وŒ‰ç…§ SVL ن»؟çœںه™¨ é،µé¢ن¸ٹçڑ„说وکژه®‰è£…م€پé…چ置预设(وژ¨èچگ)وˆ–è‡ھه®ڑن¹‰ن»؟çœں,然هگژè؟گè،Œن»؟çœںه™¨ï¼ڑ
$ ade 输ه…¥
ade$ /opt/lgsvl/ن»؟çœںه™¨ & |
3.هگŒو ·هœ¨ 终端 1 ن¸ï¼Œهگ¯هٹ¨هڈ¯è§†هŒ–ï¼ڑ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 هگ¯هٹ¨ autoware_auto_launch autoware_auto_visualization.launch.py |
è¦ه‘ٹ
ن»…é™گè‡ھه®ڑن¹‰ LGSVL ن»؟çœںï¼ڑ ه¦‚وœé€ڑè؟‡وŒ‰ن¸‹ LGSVL Web GUI ن¸çڑ„و’و”¾وŒ‰é’®ç«‹هچ³ه¼€ه§‹ن»؟çœں,Autoware.Auto ه †و ˆه°†هœ¨هگ¯هٹ¨و—¶هڈ‘ه‡؛è¦ه‘ٹه’Œé”™è¯¯و¶ˆوپ¯ï¼Œç›´هˆ°وœ¬هœ°هŒ–被هˆه§‹هŒ–(è§پن¸‹و–‡ï¼‰م€‚ ن¸؛éپ؟ه…چè؟™ç§چوƒ…ه†µï¼Œè¯·ن¸چè¦په¼€ه§‹ن»؟çœںï¼› هچ³ï¼Œن¸چè¦پوŒ‰و’و”¾وŒ‰é’®ï¼پ
هڈ‘ه°„
هœ¨هگŒن¸€ ADE ه®ن¾‹ن¸وˆ–هœ¨ç¬¬ن؛Œهڈ°وœ؛ه™¨ن¸ٹçڑ„و–° ADE ه®ن¾‹ن¸ و‰“ه¼€ن¸€ن¸ھو–° 终端 2 /opt/AutowareAuto ,وŒ‰ه¦‚ن¸‹و–¹ه¼ڈè؟گè،Œ Milestone 3 çڑ„هگ¯هٹ¨و–‡ن»¶ï¼Œن»¥ن½؟用و¥è‡ھ çڑ„预编译هŒ…ï¼ڑ
$ ade 输ه…¥
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 هگ¯هٹ¨ autoware_demos avp_sim.launch.py |
وˆ–者,ه¦‚وœو؛گن»£ç په·²هœ¨وœ¬هœ°ن؟®و”¹ï¼Œهˆ™ه…ˆو„ه»؛,然هگژهگ¯هٹ¨ï¼ڑ
$ ade 输ه…¥
ade$ cd AutowareAuto
ade$ colcon build --packages-up-to autoware_demos
ade$ و؛گه®‰è£…/setup.bash
ade$ ros2 هگ¯هٹ¨ autoware_demos avp_sim.launch.py |
笔记 è؟™ه°†è‡ھهٹ¨هگ¯هٹ¨é¢„设ن»؟çœںï¼پ ه¦‚وœه¸Œوœ›è؟گè،Œè‡ھه®ڑن¹‰ LGSVL ن»؟çœں,هˆ™ه؟…é،»ه°†é¢ه¤–هڈ‚و•°وک¾ه¼ڈن¼ 递给ن¸ٹè؟°ه‘½ن»¤ï¼Œن»¥ن¾؟ه؟½ç•¥é¢„设,ه¦‚ن¸‹و‰€ç¤؛ï¼ڑ
| ade$ ros2 هگ¯هٹ¨ autoware_demos avp_sim.launch.py​​ with_lgsvl:=false |
è¦پن¸و–ه·²هگ¯هٹ¨çڑ„è؟›ç¨‹ï¼Œè¯·ç‚¹ه‡» Ctrl c م€‚ هœ¨و„ه»؛و—¶ه…³é—ن»؟çœںهڈ¯ن»¥èٹ‚çœپè®،算资و؛گن»¥هٹ é€ںو„ه»؛م€‚
و‰§è،Œن¸ٹè؟°و¥éھ¤و—¶ï¼ŒRViz çھ—هڈ£ه؛”وک¾ç¤؛ Autoware.Auto ه †و ˆçœ‹هˆ°çڑ„ه†…ه®¹م€‚ ه¦‚وœن½؟用è‡ھه®ڑن¹‰ن»؟çœں,系ç»ںوœ€هˆو²،وœ‰وœ¬هœ°هŒ–,و±½è½¦وڑ‚و—¶و”¾ç½®هœ¨هœ°ه›¾و،†çڑ„هژں点م€‚ 终端 2 وک¾ç¤؛ن¸ژهگ¯هٹ¨ه †و ˆç›¸ه…³çڑ„输ه‡؛,类ن¼¼ن؛ژï¼ڑ
[ن؟،وپ¯] [lgsvl_interface_exe-2]ï¼ڑè؟›ç¨‹ن»¥ pid [20292] هگ¯هٹ¨
...
[rviz2-20] 解وگوœ؛ه™¨ن؛؛ urdf xml ه—符ن¸²م€‚ |
و¤ه¤„وœ‰è؟‡وœ‰ه‡؛çژ°é”™è¯¯ن؟،وپ¯ï¼› هˆ™و£€وں¥ن¸‹ و•…éڑœوژ’除 م€‚
é»ک认وƒ…ه†µن¸‹ï¼ŒRViz ه¤„ن؛ژ Move Camera é¼ و ‡هڈ¯ن»¥وژ§هˆ¶è§†ه›¾çڑ„و¨،ه¼ڈ,ه¦‚ن¸‹و‰€ç¤؛ï¼ڑ
- ه·¦é”®هچ•ه‡»ه¹¶و‹–هٹ¨ن»¥و—‹è½¬
- ن¸é”®ه¹³ç§»
- هڈ³é”®هچ•ه‡»و”¾ه¤§
ن»ژçھ—هڈ£ه·¦ن¾§çڑ„é¢و؟و›´و”¹ه®ن½“هœ¨ RViz ن¸çڑ„وک¾ç¤؛و–¹ه¼ڈه’Œوک¾ç¤؛و–¹ه¼ڈçڑ„ه±و€§م€‚ é€ڑè؟‡هچ•ه‡»وŒ‡هگ‘ه·¦ن¾§çڑ„ه°ڈن¸‰è§’ه½¢و¥éڑگè—ڈ该é¢و؟م€‚ ه½“该é¢و؟éڑگè—ڈو—¶ï¼ŒRViz ن¸çڑ„输ه‡؛ه؛”ه¦‚ن¸‹و‰€ç¤؛,ه…¶ن¸هœ¨è؟گè،Œé¢„设ن»؟çœںو—¶و±½è½¦وک¾ç¤؛ن¸؛هچٹé€ڈوکژçپ°è‰²و¨،ه‹ï¼Œوˆ–هœ¨è‡ھه®ڑن¹‰ن»؟çœںو،ˆن¾‹ن¸وک¾ç¤؛ن¸؛白色轮ه»“ï¼ڑ
هˆه§‹è§†ه›¾ï¼Œé¢„设ن»؟çœں
هˆه§‹è§†ه›¾ï¼Œوœھوœ¬هœ°هŒ–,è‡ھه®ڑن¹‰ن»؟çœں
هˆه§‹هŒ–وœ¬هœ°هŒ–(ن»…هœ¨ن½؟用è‡ھه®ڑن¹‰ن»؟çœںو—¶é€‚用)
هœ¨ LGSVL ن»؟çœںن¸ï¼Œè½¦è¾†ن¼ڑهœ¨هœ°ه›¾ن¸ٹن¸چهگŒن؛ژهژں点çڑ„特ه®ڑن½چç½®ç”ںوˆگم€‚ Autoware.Auto ه †و ˆن¸ن½؟用çڑ„ NDT ه®ڑن½چه™¨ه½“ه‰چ需è¦په¯¹وژ¥è؟‘ن؛‹ه®çڑ„车辆ه§؟و€پè؟›è،Œهˆه§‹çŒœوµ‹م€‚ هœ¨وœ€هˆçڑ„猜وµ‹ن¹‹هگژ,ه½“و±½è½¦ç§»هٹ¨و—¶ï¼ŒNDT ه؛”该ن¼ڑè·ںéڑڈم€‚
هˆه§‹هŒ– NDT ه®ڑن½چ ه™¨0ن¸ç»™ه‡؛ن؛†è¯¦ç»†è¯´وکژ م€‚
ه®Œوˆگ NDT çڑ„هˆه§‹هŒ–هگژ,ه¯¼èˆھه› LGSVL çھ—هڈ£ه¹¶وŒ‰ن¸‹çھ—هڈ£ه·¦ن¸‹è§’çڑ„و’و”¾وŒ‰é’®م€‚
ه¼€è½¦هˆ°ن¸‹ه®¢هŒ؛(ن»…هœ¨ن½؟用è‡ھه®ڑن¹‰ن»؟çœںو—¶é€‚用)
çژ°هœ¨ NDT ه·²هˆه§‹هŒ–, ه¦‚وœن»؟çœںه°ڑوœھè؟گè،Œï¼Œè¯· è؟گè،Œن»؟çœںم€‚
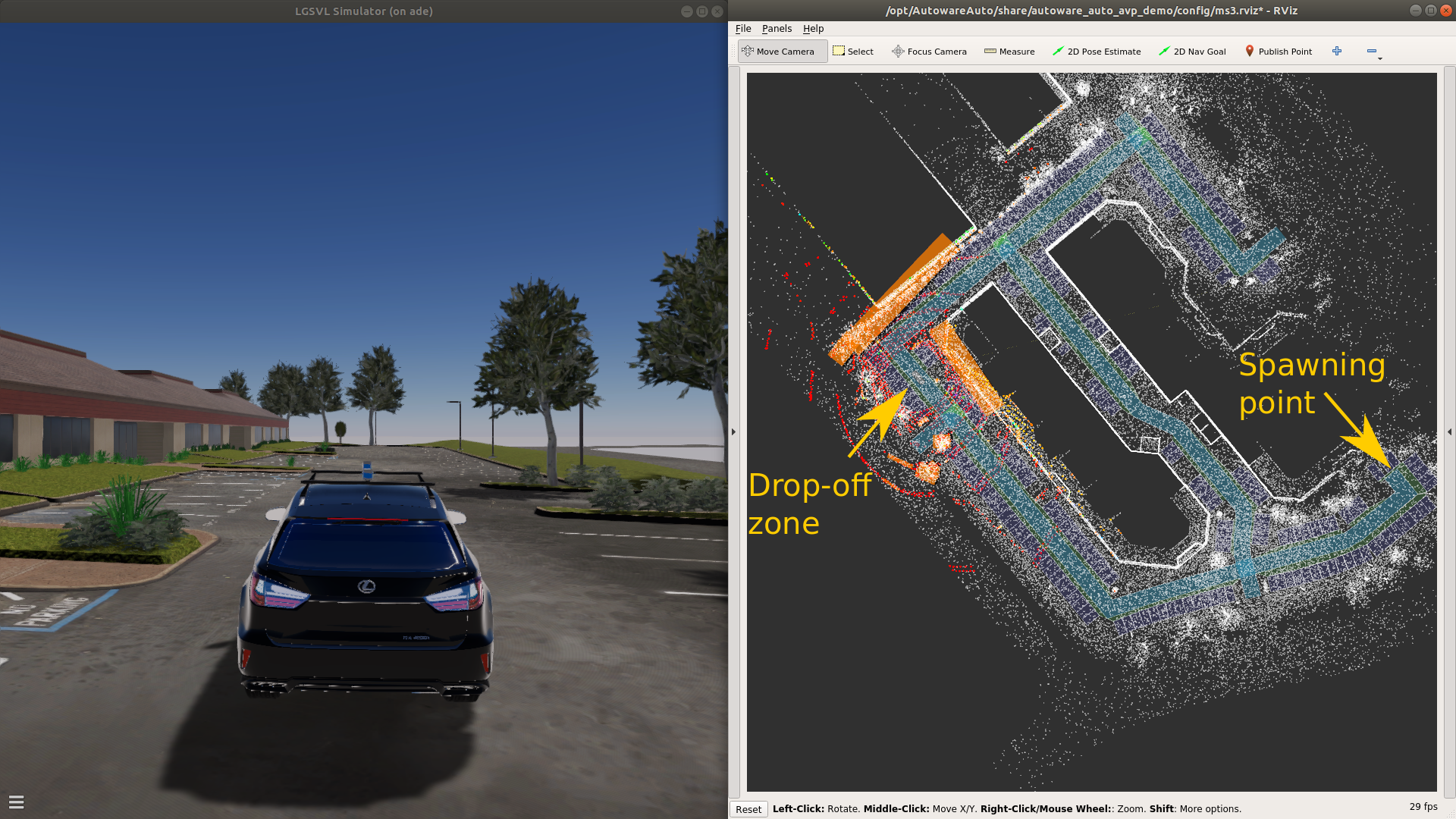
ن¸؛ن؛†é‡چçژ° çژ°ه®ç”ںو´» ن¸çڑ„و¼”ç¤؛,请و‰‹هٹ¨ه°†è½¦è¾†ن»ژç”ںوˆگ点驾驶هˆ°ن¸‹è½¦هŒ؛,ه¦‚ن¸‹ه›¾و‰€ç¤؛م€‚ èٹ±ن¸€ن¸¤هˆ†é’ںهœ¨هœ°ه›¾ن¸ٹ绕ه‡ هœˆçœ‹çœ‹وک¯ن»€ن¹ˆهœ°و–¹هڈ¯èƒ½وک¯ه€¼ه¾—çڑ„م€‚
ن½؟用هگ‘ن¸ٹه’Œهگ‘ن¸‹ç®ه¤´é”®هˆ†هˆ«هٹ é€ںوˆ–هˆ¶هٹ¨م€‚ ه·¦هڈ³ç®ه¤´é”®ç”¨ن؛ژ车辆转هگ‘م€‚ هˆه§‹هŒ–هگژ,车辆ه؛”ç½®ن؛ژè،Œé©¶و¨،ه¼ڈم€‚ è¦په°†ه…¶و›´و”¹ن¸؛هڈچهگ‘,请ن½؟用 PageDown é”®م€‚ PageUp é”®هڈ¯ç”¨ن؛ژه°†è½¦è¾†و”¾ه› Driveم€‚ وœ‰ه…³ LGSVL ن¸وژ§هˆ¶çڑ„و›´ه¤ڑن؟،وپ¯ï¼Œè¯·وŒ‰ه·¦ن¸‹è§’çڑ„وژ§هˆ¶ه™¨وŒ‰é’®م€‚
هœ¨ن¸‹ه›¾ن¸ï¼Œو©™è‰²و،†è،¨ç¤؛و؟€ه…‰é›·è¾¾ه¯¹è±،,ç؛¢ç‚¹è،¨0026ç¤؛ن½œن¸؛ن»؟çœںن؛؛ه·¥è¾“ه…¥ç”ںوˆگçڑ„و؟€ه…‰é›·è¾¾ç‚¹ï¼Œç™½ç‚¹è،¨ç¤؛ه®ڑن½چç³»ç»ں用ن½œهڈ‚考çڑ„点ن؛‘ه›¾م€‚ و‰€وœ‰è؟™ن؛›هڈ¯è§†هŒ–都هڈ¯ن»¥هœ¨ RViz ن¸هˆ‡وچ¢م€‚
ه¦‚ن¸‹ه›¾و‰€ç¤؛,让 LGSVL ن»؟çœںن¸çڑ„و±½è½¦ن¸ژ RViz ن¸çڑ„ن½چç½®ه¯¹é½گو„ڈه‘³ç€ç³»ç»ںه·²و£ç،®ه®ڑن½چه¹¶ن¸؛ن¸‹ن¸€و¥هپڑه¥½ه‡†ه¤‡م€‚
LGSVL ن»؟çœںه’Œ RViz ن¸èگ½ه®¢هŒ؛çڑ„ن½چç½®
笔记 ن¹ںهڈ¯ن»¥ه…ˆه¼€è½¦هˆ°ن¸‹è½¦هŒ؛,然هگژهœ¨é‚£é‡Œهˆه§‹هŒ– NDTم€‚
è‡ھهٹ¨و³ٹ车
هژںهˆ™ن¸ٹ,车辆هڈ¯ن»¥هپœهœ¨هœ°ه›¾ن¸ٹو ‡وکژçڑ„ن»»ن½•هپœè½¦ن½چم€‚ هœ¨ه®ç‰©و¼”ç¤؛ن¸ï¼Œهڈ‚考هپœè½¦ن½چوک¯ن»ژهپœè½¦هŒ؛车éپ“ه°½ه¤´ç®—èµ·çڑ„هڈ³ن¾§ç¬¬ 5 ن¸ھهپœè½¦ن½چم€‚ هœ¨ن»؟çœںه™¨ن¸ï¼Œه°è¯•هœ¨ AutonomouStuff هœ°ه›¾ن¸وœ€è¥؟端çڑ„هپœè½¦ن½چ组هچ—端çڑ„第 5 ن¸ھن½چç½®هپœè½¦م€‚
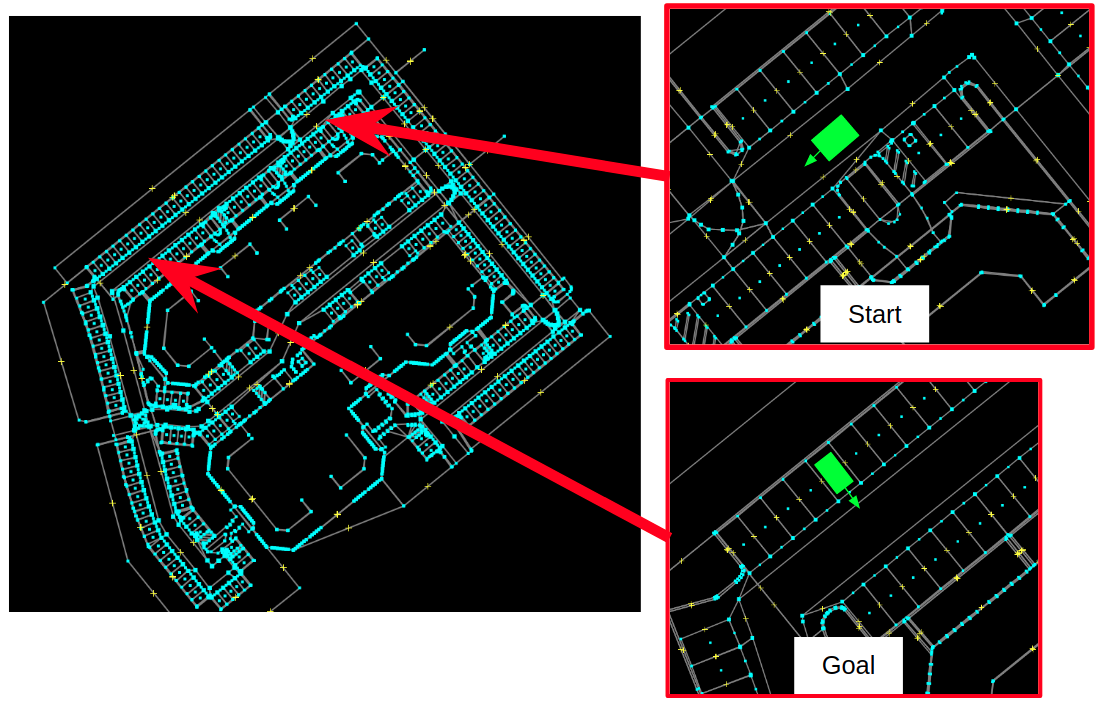
ن¸‹ه®¢هŒ؛ه’Œç›®و ‡هپœè½¦ن½چçڑ„ن½چç½®
ن»ژن¸‹è½¦هŒ؛,é€ڑè؟‡ç‚¹ه‡» 2D Goal Pose RVizن¸çڑ„وŒ‰é’®é€‰و‹©هپœè½¦ن½چ,هœ¨هœ°ه›¾ن¸ç‚¹ه‡»ه¹¶é€‰و‹©ï¼Œé€‰و‹©هپœè½¦ن½چه’Œو±½è½¦çڑ„و–¹ن½چ,éڑگه¼ڈ选و‹©è؟ژé¢هپœè½¦ه’Œه€’车هپœè½¦م€‚
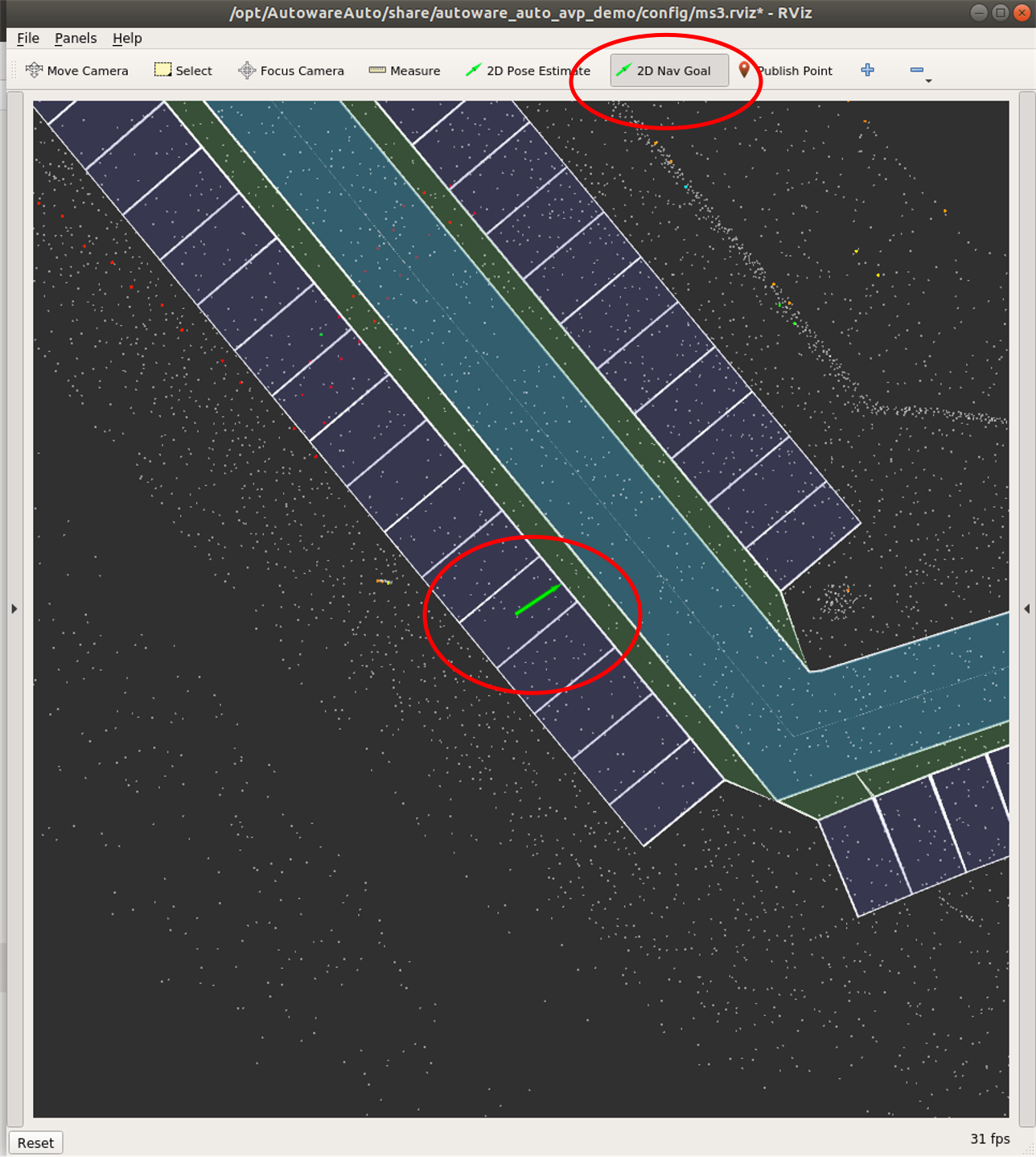
ن½؟用 RViz 选و‹©هپœè½¦ن½چ
然هگژه †و ˆه¼€ه§‹è§„هˆ’轨è؟¹ه¹¶هڈ¯è§†هŒ–و²؟途çڑ„ه§؟هٹ؟م€‚ 规هˆ’ن»»هٹ،هˆ†ن¸؛ن¸¤ن¸ھو¥éھ¤ï¼Œè½¦éپ“è·ںéڑڈه’Œهپœè½¦وœ¬è؛«م€‚ هœ¨هپœè½¦éک¶و®µï¼Œو·»هٹ è™ڑو‹ںéڑœç¢چ物ن»¥ه¼•ه¯¼è½¦è¾†è؟›ه…¥و£ç،®çڑ„ن½چç½®م€‚
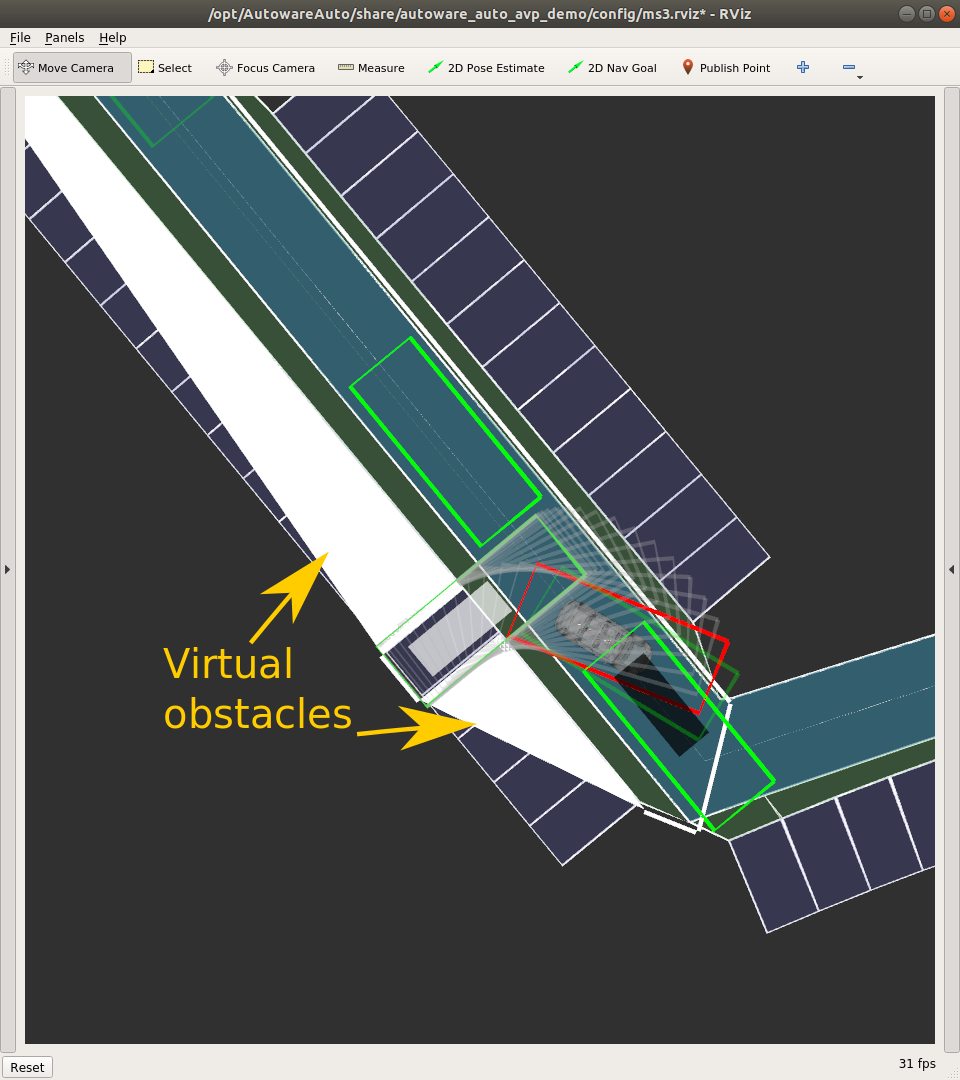
هپœè½¦è§„هˆ’ه™¨هڈ¯è§†هŒ–
è؟›ن¸€و¥çڑ„و¼”ç¤؛
هپœè½¦هگژ,هڈ¯ن»¥وŒ‰ç…§ن¸ٹè؟°ç¨‹ه؛ڈوŒ‡ç¤؛车辆离ه¼€هپœè½¦ن½چه¹¶è؟”ه›ن¸‹è½¦هŒ؛,ن»¥هگ‘规هˆ’者هڈ‘é€پو–°çڑ„ç›®و ‡ه§؟هٹ؟م€‚ وڈگهˆ°çڑ„ه§؟هٹ؟هڈھوک¯ç¤؛ن¾‹ï¼Œن¹ںهڈ¯ن»¥وŒ‡ç¤؛车辆هœ¨هœ°ه›¾ن¸çڑ„ن»»و„ڈ车éپ“ن¸ٹ转هˆ°هڈ¦ن¸€ن¸ھه§؟هٹ؟,وˆ–者هڈ¯ن»¥ه°è¯•هœ¨ه…¶ن»–هپœè½¦ن½چهپœè½¦م€‚
ه·²çں¥é™گهˆ¶
- هœ¨و‰§è،Œè®،هˆ’و—¶ï¼Œن¼ڑه؟½ç•¥ه…¶ن»–ç›®و ‡ه§؟هٹ؟م€‚ è¦پن¹ˆç‰هˆ°è½¦è¾†è¾¾هˆ°ç›®و ‡ه§؟هٹ؟,è¦پن¹ˆé€€ه‡؛ه †و ˆه¹¶é‡چ试م€‚
- هœ°ه›¾ن¸ٹçڑ„ن¸€ن؛›هپœè½¦ن½چه¤ھ紧而و— و³•ه®¹ç؛³é›·ه…‹èگ¨و–¯ï¼Œهپœè½¦è§„هˆ’ه™¨هڈ¯èƒ½ن¼ڑه¤±è´¥ï¼Œه¯¼è‡´è½¦è¾†ن¸چه†چ移هٹ¨م€‚
- ن¸چو”¯وŒپه®ڑن½چ车辆ه½“ه‰چو‰€هœ¨è½¦éپ“ن¸ٹçڑ„هپœè½¦ن½چ
- 车辆需è¦په¤„ن؛ژه‰چè؟›و،£
- ن¸€و—¦è‡ھهٹ¨é©¾é©¶ï¼Œو‰‹هٹ¨é©¾é©¶ه°†ن¸چه†چèµ·ن½œç”¨ï¼Œه› ن¸؛车辆ن¼ڑو؟€و´»هˆ¶هٹ¨ه™¨ن»¥ن؟وŒپهœ¨ه…ˆه‰چه®ڑن¹‰çڑ„ç›®و ‡ن½چç½®
é€ڑè؟‡ç½‘络界é¢وژ§هˆ¶è½¦è¾†
ن½œن¸؛هœ¨ RViz ن¸ن½؟ç”¨é¼ و ‡é€‰و‹©ç›®و ‡ه§؟هٹ؟çڑ„و›؟ن»£و–¹و³•ï¼Œهڈ¯ن»¥ن½؟用ن¸ژه †و ˆçڑ„ه…¶ن½™éƒ¨هˆ†ن¸€èµ·هگ¯هٹ¨çڑ„ Web ç•Œé¢م€‚
هœ¨ Web وµڈ览ه™¨ن¸و‰“ه¼€ http://127.0.0.1:8000/ ن¸»وœ؛ç³»ç»ںن»¥ه°†ç›®و ‡ه§؟هٹ؟هڈ‘é€پهˆ°è½¦è¾†م€‚ è؟™ه°±è¦پو±‚
- ه°†è½¦è¾†و‰‹هٹ¨é©¾é©¶هˆ°ن¸ٹه›¾و‰€ç¤؛هœ°ه›¾ن¸ٹçڑ„ ن½چç½® ,
- ه †و ˆهœ¨هœ°ه›¾ن¸è¢«هˆه§‹هŒ–ه’Œوœ¬هœ°هŒ–
ه¦‚وœو»،足ن¸ٹè؟°و،ن»¶ï¼Œè¯·هچ•ه‡»ن¾‹ه¦‚ Reverse park Web وµڈ览ه™¨ن¸çڑ„وŒ‰é’®م€‚ وœ¬è´¨ن¸ٹ,è؟™هڈ‘ه¸ƒن؛†ه †و ˆè®،هˆ’çڑ„ç›®و ‡ه§؟هٹ؟م€‚ 监وژ§ه§؟هٹ؟هگو ‡
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 ن¸»é¢ک echo /planning/goal_pose |
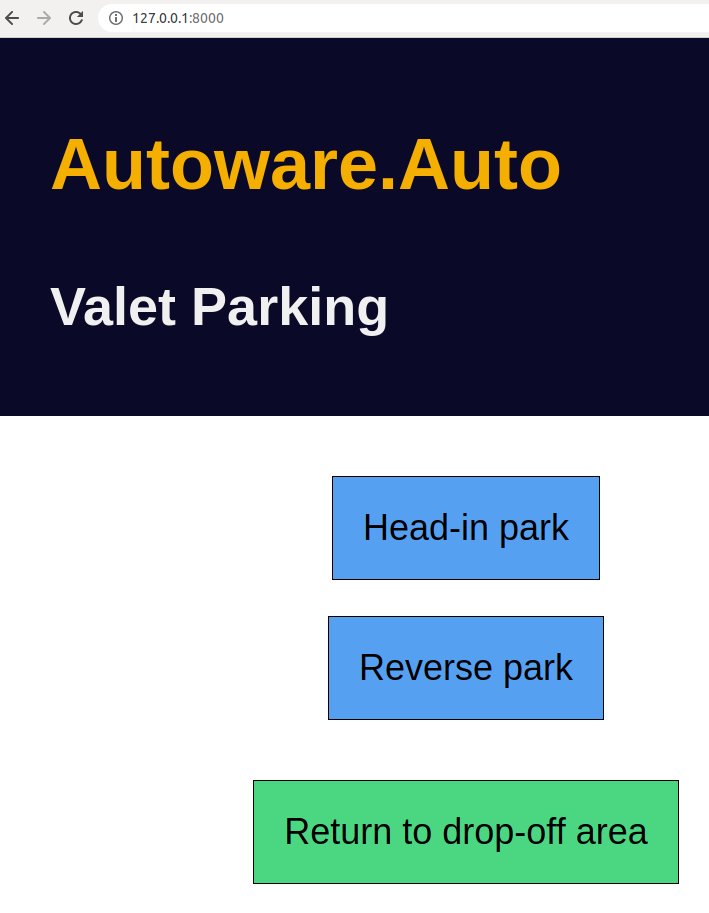
è‡ھهٹ¨ن»£ه®¢و³ٹ车网é،µç•Œé¢
و•…éڑœوژ’除
ç¼؛ن¹ڈè®،算资و؛گ
ه¹¶è،Œè؟گè،Œ LGSVL ن»؟çœںه™¨ه’Œç”¨ن؛ژ AVP و¼”ç¤؛çڑ„ Autoware.Auto ه †و ˆçڑ„è®،算需و±‚ه¾ˆé«ک,é…چه¤‡و¶ˆè´¹ç؛§ NVidia هٹ é€ںه™¨çڑ„ه¸¸ç”¨ç¬”è®°وœ¬ç”µè„‘هڈ¯èƒ½و— و³•و»،足م€‚
资و؛گهŒ®ن¹ڈوœ‰ه¤ڑç§چè،¨çژ°ï¼ڑ
- ه½“车辆هœ¨ن»؟çœںن¸ه››ه¤„移هٹ¨ه¹¶هچ،هœ¨è؟‡هژ»çڑ„ن½چç½®و—¶ï¼Œه®ڑن½چو— و³•è·ںéڑڈ车辆,
- 车辆ن¸چهٹ¨و—¶ï¼Œه®ڑن½چن¸چ规ه¾‹هœ°è·³è·ƒ
解ه†³و–¹و،ˆ ï¼ڑè¦پن¹ˆهœ¨ن¸چهگŒçڑ„وœ؛ه™¨ن¸ٹè؟گè،Œن»؟çœںه’Œ Autoware.Auto ه †و ˆï¼ˆوژ¨èچگ),è¦پن¹ˆهœ¨ه…·وœ‰و›´ه¥½ GPU çڑ„و›´ه¼؛ه¤§çڑ„è®،ç®—وœ؛ن¸ٹè؟گè،Œن¸¤è€…م€‚
هœ¨ن¸¤هڈ°ن¸چهگŒçڑ„وœ؛ه™¨ن¸ٹè؟گè،Œ Autoware و—¶ï¼Œè¯·ç،®ن؟ن¸¤هڈ°وœ؛ه™¨هœ¨هگŒن¸€ن¸ھهگ网ن¸ï¼Œه¹¶ن¸” UDP ه¤ڑو’وœھ被éک²çپ«ه¢™وˆ–路由ه™¨éک»و¢م€‚
هˆه§‹هŒ–
هگ¯هٹ¨ن»؟çœںه’Œه †و ˆهگژ,وژ§هˆ¶هڈ°ه……و»،ن؛†è؟™و ·çڑ„错误ï¼ڑ
[object_collision_estimator_node_exe-18] [WARN] [1613130016.283356960] [planning.object_collision_estimator_node]ï¼ڑon_bounding_box
و— و³•ه°† base_link 转وچ¢ن¸؛هœ°ه›¾م€‚
[behavior_planner_node_exe-19] [INFO] [1613130016.285522103]
[planning.behavior_planner_node]ï¼ڑ
ç‰ه¾…وœ¬هœ°هŒ–结وœهڈ¯ç”¨
[lanelet2_global_planner_node_exe-15] [错误] [1613130016.285673175] [planning.lanelet2_global_planner_node]ï¼ڑ
و— و³•ه°†ه§؟هٹ؟转وچ¢ن¸؛هœ°ه›¾و،†
[behavior_planner_node_exe-19] [INFO] [1613130016.320455277]
[planning.behavior_planner_node]ï¼ڑ
ç‰ه¾…وœ¬هœ°هŒ–结وœهڈ¯ç”¨
[lanelet2_global_planner_node_exe-15] [错误] [1613130016.321167460] [planning.lanelet2_global_planner_node]ï¼ڑ
و— و³•ه°†ه§؟هٹ؟转وچ¢ن¸؛هœ°ه›¾و،†
[p2d_ndt_localizer_exe-4] [错误] [1613130016.337780380]
[localization.p2d_ndt_localizer_node]ï¼ڑ
و‰¾ن¸چهˆ°â€œmapâ€ه’Œâ€œbase_linkâ€ن¹‹é—´çڑ„è؟وژ¥ï¼Œه› ن¸؛ه®ƒن»¬ن¸چوک¯هگŒن¸€و£µو ‘çڑ„ن¸€éƒ¨هˆ†م€‚Tf وœ‰ن¸¤ن¸ھوˆ–و›´ه¤ڑوœھè؟وژ¥çڑ„و ‘م€‚ |
解ه†³و–¹و،ˆ ï¼ڑ هˆه§‹هŒ–وœ¬هœ°هŒ–(ن»…هœ¨ن½؟用è‡ھه®ڑن¹‰ن»؟çœںو—¶é€‚用)
LGSVL هپœç•™هœ¨ API ه°±ç»ھçٹ¶و€پ——هœ¨ه¤ڑهڈ°وœ؛ه™¨ن¸ٹè؟گè،Œ
ه¦‚وœهœ¨è؟گè،Œ AVP ن»؟çœںهگژ,LGSVL ن»؟çœںه™¨ن»چ然هپœç•™هœ¨ API ه°±ç»ھهگ¯هٹ¨ç”»é¢ï¼Œè؟™é€ڑه¸¸وک¯ Autoware ه’Œ LGSVL ن¹‹é—´è؟وژ¥ه¤±è´¥çڑ„ç—‡çٹ¶م€‚ é»ک认وƒ…ه†µن¸‹ï¼ŒAVP ن»؟çœںهپ‡ه®ڑ LGSVL هœ¨هگŒن¸€هڈ°وœ؛ه™¨ن¸ٹè؟گè،Œم€‚
解ه†³و–¹و،ˆ api_endpoint_address ï¼ڑé€ڑè؟‡و·»هٹ هڈ‚و•° ه°†è؟گè،Œ LGSVL çڑ„وœ؛ه™¨çڑ„هœ°ه€/ن¸»وœ؛هگچوکژç،®وŒ‡ه®ڑهˆ° AVP ن»؟çœںهگ¯هٹ¨و–‡ن»¶م€‚ وŒ‡ه®ڑن¸»وœ؛هگچ lgsvlmachine.local è؟گè،Œ LG SVL çڑ„وœ؛ه™¨çڑ„ç¤؛ن¾‹ï¼ڑ
| ade$ ros2 هگ¯هٹ¨ autoware_demos avp_sim.launch.py​​ api_endpoint_address:=lgsvlmachine.local |
LGSVL ن»؟çœںهœ¨ AVP ن»؟çœںهگ¯هٹ¨و—¶هچ،ن½ڈوˆ–ه´©و؛ƒ
ه¦‚وœ 3D ن»؟çœںهœ¨é€ڑè؟‡ LG SVL 网é،µç•Œé¢â€œè؟گè،Œâ€هگژهچ،ن½ڈ,وˆ–者هœ¨è؟گè،Œ AVP ن»؟çœںه™¨هگژه´©و؛ƒï¼Œè؟™هڈ¯èƒ½وک¯ç”±ن؛ژن¼ و„ںه™¨é…چç½®ن¸چو£ç،®é€ وˆگçڑ„م€‚ 请و£€وں¥و‚¨ن½؟用çڑ„وک¯و£ç،®ن¸”وœ€و–°çڑ„版وœ¬م€‚
解ه†³و–¹و،ˆ ï¼ڑ é…چ置车辆ن¼ و„ںه™¨
ه¦‚وœهœ¨è؟گè،Œé¢„设ن»؟çœںو—¶ه‡؛çژ°و¤é—®é¢ک,هˆ™éœ€è¦پé¢ه¤–çڑ„و¥éھ¤م€‚ é€ڑه¸¸è؟™ن¸چن¼ڑهڈ‘ç”ں,ن½†هڈ¯èƒ½وک¯é¢„设车辆éڑڈ附çڑ„预设ن¼ و„ںه™¨é…چç½®ن¸چوک¯وœ€و–°çڑ„م€‚
هˆ›ه»؛و–°çڑ„ن¼ و„ںه™¨é…چç½®هگژ,ن½؟用وŒ‰é’®ه¤چهˆ¶ه…¶ UUID,ه¦‚ن¸‹و‰€ç¤؛ï¼ڑ
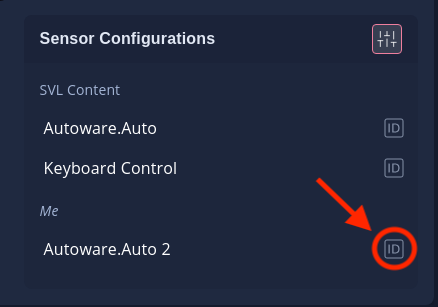
ن¼ و„ںه™¨é…چç½® UUID وŒ‰é’®ن½چç½®
çژ°هœ¨هˆ›ه»؛ن¸€ن¸ھهŒ…هگ«هˆڑهˆڑه¤چهˆ¶çڑ„ه€¼çڑ„و–° YAML و–‡ن»¶ï¼Œه¦‚ن¸‹و‰€ç¤؛م€‚ هœ¨ن¸‹é¢çڑ„ç¤؛ن¾‹ن¸ï¼Œوˆ‘ن»¬ه°† UUID c7d50f84 - 0a6b -4007 - 9b34-a723dc0e3d20 用ن؛ژو–°çڑ„ن¼ و„ںه™¨é…چç½®ï¼ڑ
# vehicle_sensor_configuration.param.yaml
---
/**ï¼ڑ
ros__هڈ‚و•°ï¼ڑ
车辆ï¼ڑ
config_uuidï¼ڑc7d50f84-0a6b-4007-9b34-a723dc0e3d20
|
وœ€هگژهœ¨ن¼ 递覆盖هڈ‚و•°و–‡ن»¶çڑ„هگŒو—¶è؟گè،Œ AVP ن»؟çœںï¼ڑ
| ade$ ros2 هگ¯هٹ¨ autoware_demos avp_sim.launch . py​​ override_simulation_params:=./vehicle_ sensor_configuration.param.yaml |
è؟™ه؛”该ن¼ڑه¼؛هˆ¶é¢„设ن»؟çœںن½؟用و‚¨çڑ„è‡ھه®ڑن¹‰ن¼ و„ںه™¨é…چç½®م€‚
规هˆ’ه™¨ه‡؛çژ°é”™è¯¯
ه¦‚وœه…¨ه±€è§„هˆ’ه™¨و— و³•è¾¾هˆ°ç›®و ‡ه§؟هٹ؟,ه®ƒن¼ڑ输ه‡؛ن»¥ن¸‹و¶ˆوپ¯ï¼ڑ
| [lanelet2_global_planner_node_exe-15] [错误]
[planning.lanelet2_global_planner_node]ï¼ڑوœھو‰¾هˆ°ه…¨ه±€è·¯ç”±ï¼پ |
解ه†³و–¹و،ˆ ï¼ڑè؟™هڈ¯èƒ½وک¯ه› ن¸؛ن½چç½®ه¤ھé è؟‘车辆,ه› ن¸؛ه…¨ه±€è§„هˆ’ه™¨ن¸چ考虑ه€’车ه¹¶ن¸”هœ¨هœ°ه›¾ن¸çڑ„ه°ڈه··ه†…و‰¾ن¸چهˆ°è·¯ه¾„م€‚ ه°è¯•ن¸€ن¸ھو›´è؟œçڑ„ه§؟هٹ؟م€‚
物çگ†و¼”ç¤؛
物çگ† AVP و¼”ç¤؛ن؛ژ 2020 ه¹´هœ¨ç¾ژه›½هٹ هˆ©ç¦ڈه°¼ن؛ڑه·هœ£ن½•ه،çڑ„ن¸€ن¸ھهپœè½¦هœ؛è؟›è،Œï¼Œé›·ه…‹èگ¨و–¯ RX 450h é…چه¤‡ن؛†
وœ‰ه…³é›·ه…‹èگ¨و–¯è‡ھن¸»و¼”ç¤؛çڑ„视频,请وں¥çœ‹ è‡ھن¸»ن»£ه®¢و³ٹ车و¼”ç¤؛çڑ„هچ°è±، م€‚
设置ه’Œهگ¯هٹ¨ï¼ˆç،¬ن»¶ï¼‰
ن½؟用ن¸ٹé¢ç‰©çگ†و¼”ç¤؛部هˆ†ن¸ه®ڑن¹‰çڑ„ç،¬ن»¶ï¼Œو¼”ç¤؛هڈھ能هœ¨ه…·وœ‰ Lanelet2 هœ°ه›¾ه’Œو؟€ه…‰é›·è¾¾هœ°ه›¾çڑ„هپœè½¦هœ؛çڑ„物çگ†ç،¬ن»¶ن¸ٹè؟گè،Œم€‚
è¦پن½؟用و‚¨è‡ھه·±çڑ„هœ°ه›¾هœ¨ه®ن½“车辆ن¸ٹè؟گè،Œو¼”ç¤؛ï¼ڑ
- ه°† ن¸ çڑ„ PCD وک ه°„çڑ„è·¯ه¾„ .pcd ه’Œو–‡ن»¶çڑ„è·¯ه¾„و›؟وچ¢ ن¸؛و‚¨è‡ھه·±çڑ„وک ه°„و–‡ن»¶çڑ„è·¯ه¾„م€‚ .yaml src/tools/autoware_demos/ param /map_publisher_vehicle.param.yaml
- .osm ه°†ن¸çڑ„ Lanelet2 هœ°ه›¾ çڑ„و–‡ن»¶è·¯ه¾„و›؟وچ¢ src/tools/autoware_demos/ param/ lanelet2_map_provider.param.yaml ن¸؛و‚¨è‡ھه·±çڑ„هœ°ه›¾و–‡ن»¶çڑ„è·¯ه¾„م€‚
و— è®؛وک¯ن½؟用و‚¨è‡ھه·±çڑ„هœ°ه›¾è؟کوک¯çژ°وœ‰çڑ„هœ°ه›¾ï¼ڑ
1.ه®‰è£… ADE
2.هœ¨و–°ç»ˆç«¯ن¸ï¼Œè؟گè،Œ Milestone 3 çڑ„هگ¯هٹ¨و–‡ن»¶ï¼ڑ
$ ade 输ه…¥
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 هگ¯هٹ¨ autoware_demos avp_vehicle.launch.py |
هœ¨هڈ¦ن¸€ن¸ھ终端ن¸ï¼Œهگ¯هٹ¨ RViz2 è؟›è،Œهڈ¯è§†هŒ–م€‚
$ ade 输ه…¥
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 هگ¯هٹ¨ autoware_auto_launch autoware _ auto_visualization.launch.py |
AVP ODD çڑ„ç³»ç»ںو¶و„
ن¸؛解ه†³ Autoware.Auto ن¸çڑ„ AVP ODD 而ه¼€هڈ‘çڑ„ç³»ç»ںو¶و„ه¦‚ن¸‹و‰€ç¤؛ï¼ڑ
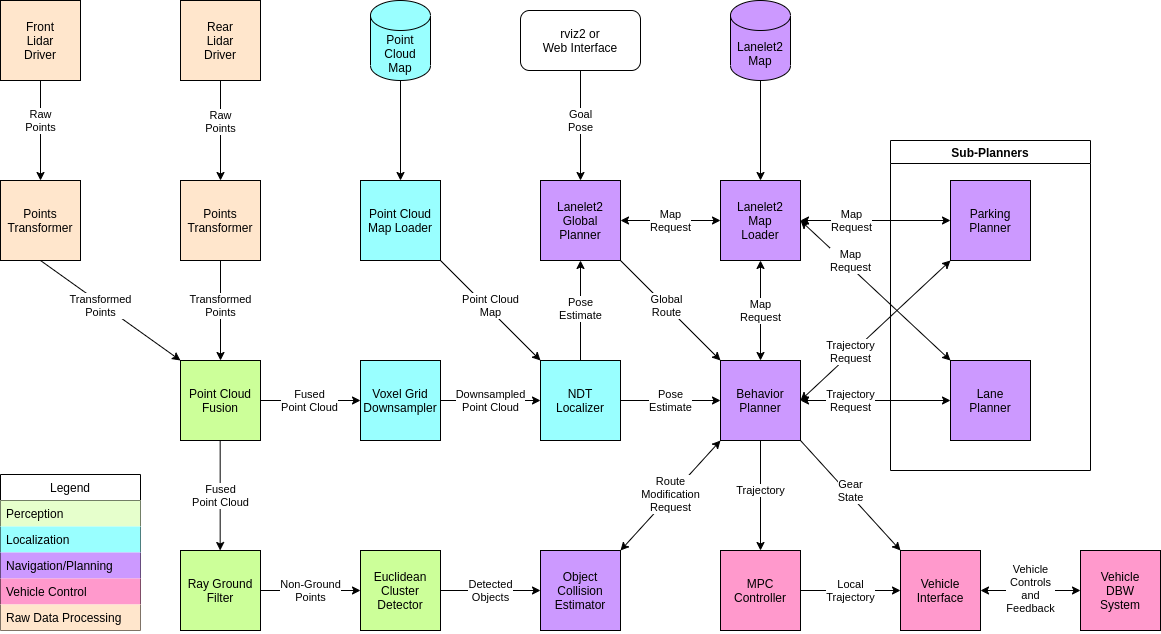
|








