LGSVLдїњзЬЯжАїжШѓеЬ®еЬ∞еЫЊзЪДдЄАдЄ™зЙєеЃЪдљНзљЃзФЯжИРж±љиљ¶пЉМдЄНеРМдЇОеОЯзВєгАВеЬ®AutowareдЄ≠дљњзФ®зЪДNDTеЃЪдљНеЩ®гАВиЗ™еК®е†ЖеП†и¶Бж±Веѓєиљ¶иЊЖеІњжАБзЪДеИЭж≠•зМЬжµЛжО•ињСдЇОзЬЯеЃЮжГЕеЖµгАВж†єжНЃињЩдЄАзМЬжµЛпЉМNDTеЬ®дЇ§дЇТдЉШеМЦдЄ≠жЙЊеИ∞жЬАдљ≥еІњжАБ(еН≥еЃЪдљН)гАВеИЭеІЛеМЦеРОпЉМNDTдљњзФ®дЄКдЄАдЄ™жЧґйЧіж≠•зЪДдњ°жБѓињЫи°МеИЭеІЛеМЦпЉМдЄНйЬАи¶БзФ®жИЈињЫдЄАж≠•иЊУеЕ•гАВеЃГеЇФиѓ•йЪПзЭАж±љиљ¶зЪДзІїеК®иАМжЬђеЬ∞еМЦгАВ
йҐДе§ЗзЯ•иѓЖ
- жМЙзЕІ SVL дїњзЬЯеЩ® иѓіжШОињЫи°МжУНдљЬгАВ
- еРѓеК® Autoware.Auto е†Жж†ИпЉМеМЕжЛђ NDT зїДдїґеТМ RViz еПѓиІЖеМЦпЉЫ дЊЛе¶ВжМЙзЕІ AVP жЉФз§ЇиѓіжШО гАВ
еЬ®жЬђеЬ∞еМЦжИРеКЯдєЛеЙНпЉМеЬ®еРѓеК®е†Жж†ИзЪДзїИзЂѓдЄ≠йҐДжЬЯдЉЪеЗЇзО∞дї•дЄЛйФЩиѓѓжґИжБѓпЉЪ
| [localization.p2d_ndt_localizer_node]пЉЪжЙЊдЄНеИ∞вАЬmapвАЭеТМвАЬbase_linkвАЭдєЛйЧізЪДињЮжО•пЉМеЫ†дЄЇеЃГдїђдЄНжШѓеРМдЄАж£µж†СзЪДдЄАйГ®еИЖгАВTf жЬЙдЄ§дЄ™жИЦжЫіе§ЪжЬ™ињЮжО•зЪДж†СгАВ |
жЬЙдЄ§зІНжЦєж≥ХеПѓдї•е∞Жиљ¶иЊЖеІњжАБзЪДеИЭеІЛзМЬжµЛеПСйАБеИ∞з≥їзїЯпЉЪ
- еЬ® RViz дЄ≠дї•еی嚥жЦєеЉПйАЙжЛ©еІњеКњгАВ
- еЬ®зїИзЂѓдЄ≠еПСеЄГеІњеКњгАВ
йАЙй°є 1. жЫізБµжіїпЉМеЫ†дЄЇеПѓдї•еЬ®ж®°жЛЯдЄ≠е∞Жж±љиљ¶еЉАеИ∞еПѓзФ®еЬ∞еЫЊдЄКзЪДдїїдљХдљНзљЃпЉМзДґеРОйАЙжЛ©еЬ®йВ£йЗМеИЭеІЛеМЦеЃЪдљНгАВ
йАЙй°є 2. жЫіеЃєжШУиОЈеЊЧеПѓйЗНе§НзЪДзїУжЮЬгАВ
жЬАеИЭпЉМRViz дї•еЬ∞еЫЊж°ЖзЪДеОЯзВєдЄЇдЄ≠ењГпЉМдљЖиљ¶иЊЖзФЯжИРеИ∞еЬ∞еЫЊдЄ≠зЪДдЄНеРМдљНзљЃпЉМRViz дїНзДґдЄНзЯ•йБУгАВ еЬ® RViz дЄ≠дљњзФ®йЉ†ж†ЗжїЪиљЃжФЊе§І/зЉ©е∞ПеєґдљњзФ®йЉ†ж†ЗдЄ≠йФЃеє≥зІїиІЖеЫЊгАВ еЬ®ж®°жЛЯеЩ®з™ЧеП£дЄ≠жМЙдЄЛ F1 дї•жЯ•зЬЛзЫЄжЬЇжОІдїґгАВ дЄЛеЫЊжШЊз§ЇдЇЖиљ¶иЊЖеЬ®еЕґдЇІеНµзВєпЉМRViz зЉ©е∞ПеИ∞иґ≥дї•жШЊз§ЇеЬ∞еЫЊж°ЖзЪДеОЯзВєеТМиљ¶иЊЖзЪДдљНзљЃгАВ еЬ∞еЫЊзЪДеОЯзВєзФ®дЄАдЄ™зЩљиЙ≤зЪДе∞ПзљСж†Љи°®з§ЇпЉМеЕґдЄ≠еМЕеРЂеБЗеЃЪпЉИдљЖдЄНж≠£з°ЃпЉЙиљ¶иЊЖеІњеКњзЪДзЩљиЙ≤иљЃеїУгАВ
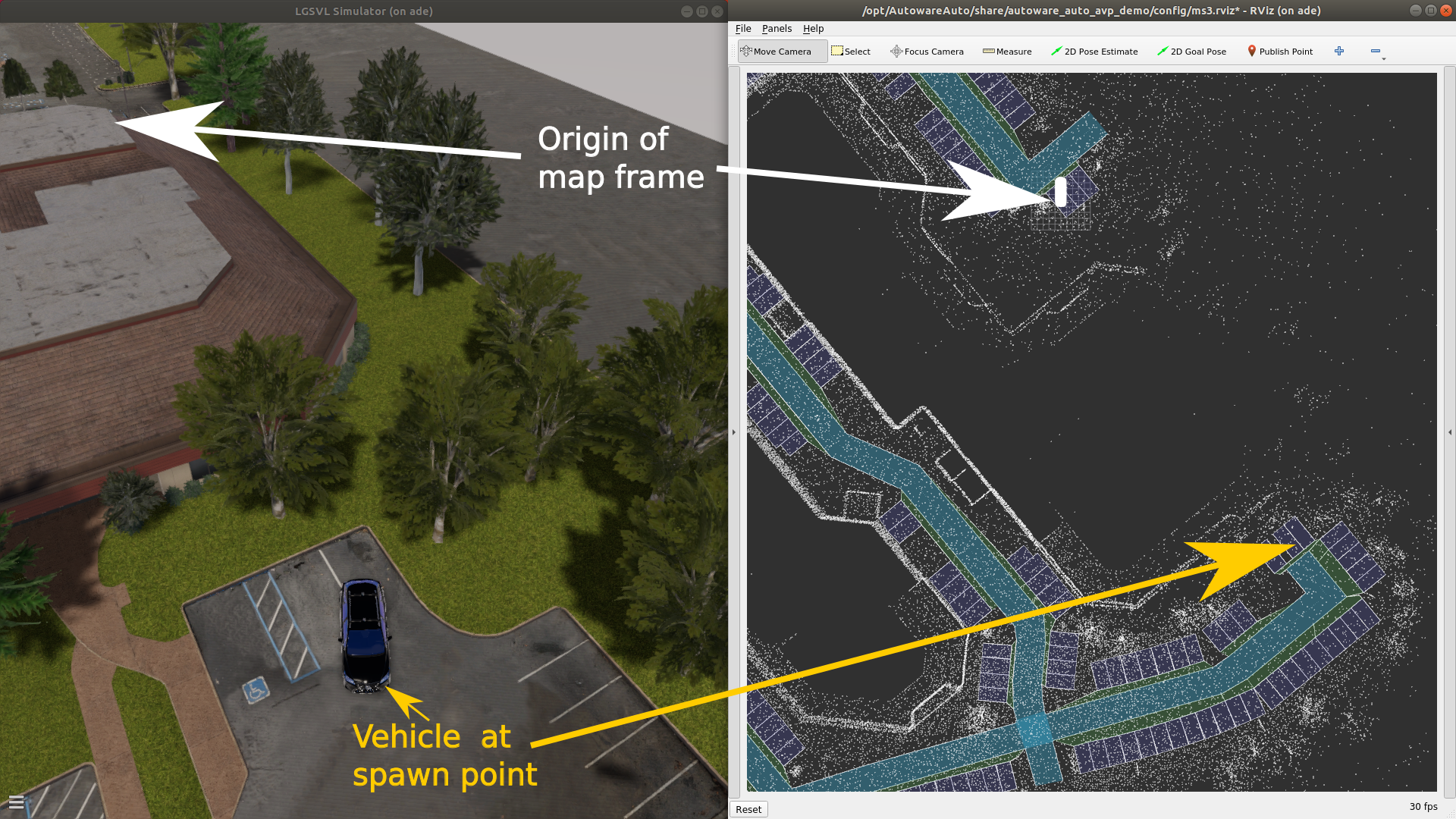
дїњзЬЯеЩ®еТМ RViz зЪДеИЭеІЛиІЖеЫЊ
дљњзФ® RViz ињЫи°МеИЭеІЛеМЦ
ж£АжЯ•еЬ® RViz дЄ≠ map жШѓеР¶йАЙжЛ©дЇЖеЫЇеЃЪж°ЖжЮґгАВ з°ЃдњЭеЬ∞еЫЊеТМ TF еПѓиІЖеМЦеЈ≤еРѓзФ®пЉМеєґдЄФжВ®жЛ•жЬЙиЙѓе•љзЪДиЗ™дЄКиАМдЄЛиІЖеЫЊгАВ
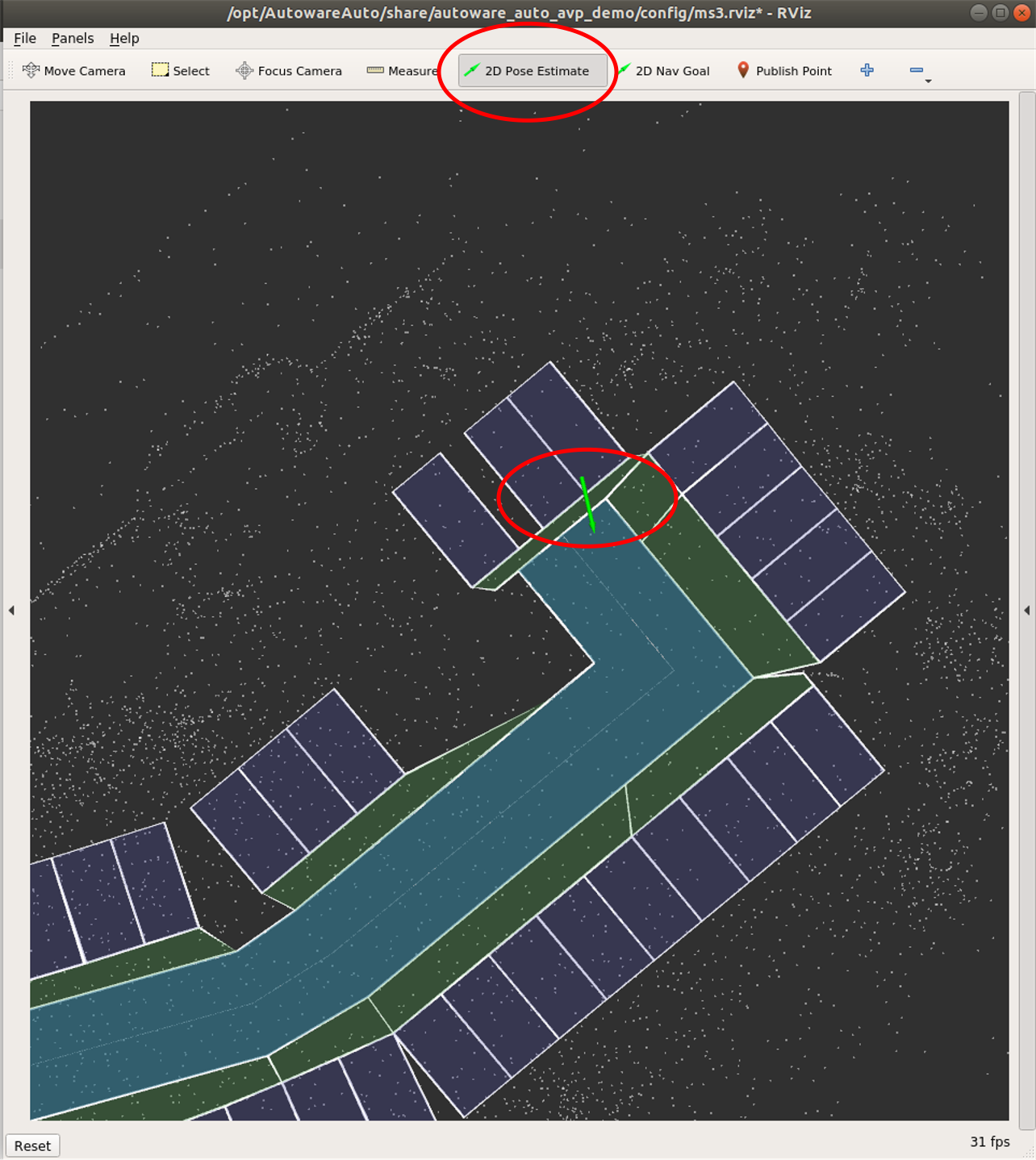
еЬ® RViz дЄ≠пЉМеНХеЗї 2D pose estimation жМЙйТЃпЉМзДґеРОеНХеЗї/жЛЦеК®иљ¶иЊЖзЪДдљНзљЃпЉМдљњзЃ≠е§іжМЗеРСдЄОж±љиљ¶зЫЄеРМзЪДжЦєеРСпЉМзДґеРОжЭЊеЉАйЉ†ж†ЗжМЙйТЃгАВ зДґеРОе∞ЖеЄ¶жЬЙеІњжАБдЉ∞иЃ°зЪДжґИжБѓеПСйАБеИ∞ NDTгАВ
ињЩжШѓ rviz иЃЊзљЃеИЭеІЛеІњеКњжЧґзЪДж†Је≠РпЉЪ
дљњзФ® rviz еИЭеІЛеМЦжЬђеЬ∞еМЦ
еПѓиІЖеМЦ tf пЉИзЇҐ-иУЭ-зїњиљіпЉЙеЇФеЗЇзО∞еЬ®иѓ•дљНзљЃпЉМеєґдЄФ Could not find a connection зїИзЂѓдЄ≠зЪДйФЩиѓѓжґИжБѓеЇФеБЬж≠ҐгАВ
ињЩжШѓ rviz жИРеКЯеИЭеІЛеМЦеРОзЪДж†Је≠РпЉМеЕЈдљУеПЦеЖ≥дЇОеРѓзФ®дЇЖеУ™дЇЫеПѓиІЖеМЦпЉЫ йЗНи¶БзЪДжШѓељ©иЙ≤ tf еНБе≠ЧжЮґ odom пЉМ base_link еЕґж†ЗиЃ∞жѓФдЊЛеЈ≤еҐЮеК†пЉМдї•дЊњеЬ® RViz еЖЕжЫіе•љеЬ∞зЬЛеИ∞пЉЪ
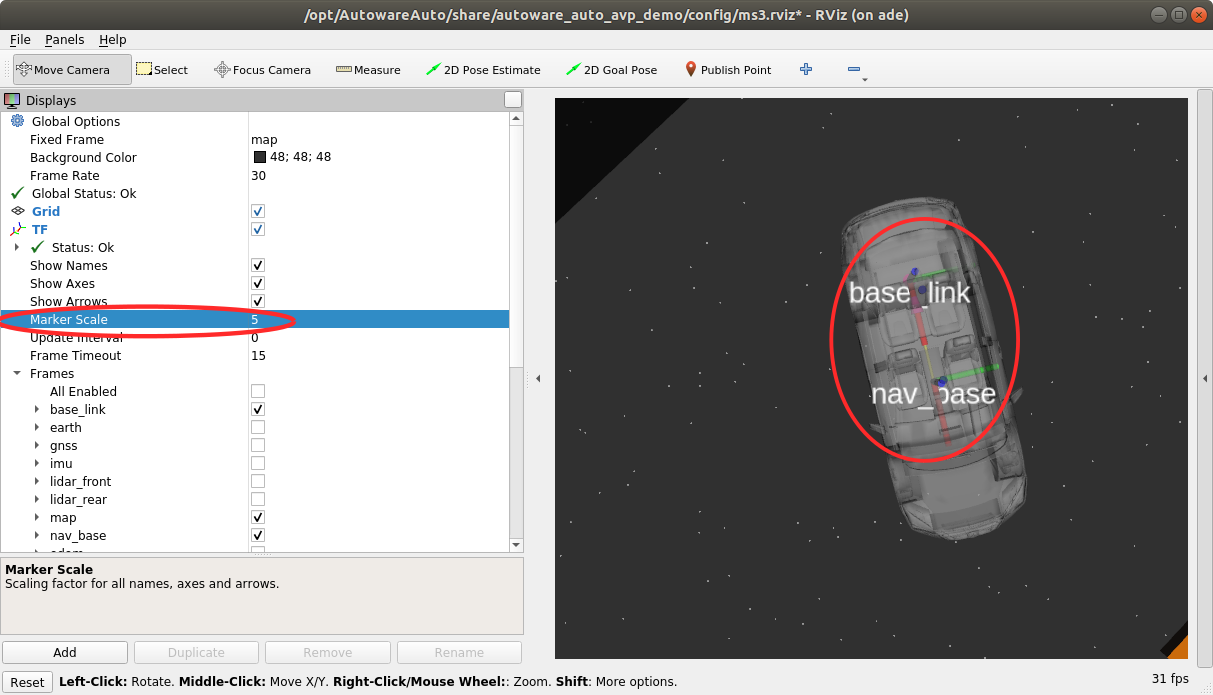
еЃЪдљНеИЭеІЛеМЦеРОеЬ® RViz дЄ≠жФЊе§Іиљ¶иЊЖ зђФиЃ∞ еЬ®зђђдЄАжђ°еЃЪдљНжЧґпЉМдЉЪжЬЙдЄАдЄ™иЈ≥иЈГпЉМеєґдЄФ RViz жШЊз§Їе±ПйЬАи¶БйЗНжЦ∞е±ЕдЄ≠дї•жШЊз§Їиљ¶иЊЖгАВ
е¶ВжЮЬеИЭеІЛеІњжАБдЉ∞иЃ°жО•ињСпЉМжВ®еЇФиѓ•иГље§ЯеЬ®ж®°жЛЯеЩ®дЄ≠еЫЫе§Ди°Мй©ґеєґзЬЛеИ∞ base_link ж°ЖжЮґиЈЯиЄ™ж±љиљ¶зЪДдљНзљЃ
и≠¶еСК е¶ВжЮЬж±љиљ¶дї•дЄНз®≥еЃЪзЪДжЦєеЉПжЙЛеК®й©Њй©ґпЉМжИЦиАЕ CPU иіЯиљљињЗе§ІеєґдЄФдЄАдЇЫжњАеЕЙйЫЈиЊЊжХ∞жНЃеМЕ襀䪥еЉГпЉМеИЩеПѓиГљжЧ†ж≥ХињЫи°МеЃЪдљНгАВ е¶ВжЮЬжЬђеЬ∞еМЦеН°дљПдЇЖпЉМйЗНжЦ∞еРѓеК®е†Жж†ИеєґйЗНжЦ∞еИЭеІЛеМЦгАВ
иѓЈж≥®жДПпЉМеПѓдї•йАЪињЗзђђдЇМзІНеИЭеІЛеМЦжЦєж≥ХеЫЮжШЊеТМе§НеИґеІњеКњдї•дЊЫдї•еРОдљњзФ®пЉЪ
de$ source /opt/AutowareAuto/setup.bash
ade$ ros2 дЄїйҐШ echo /localization/initialpose |
дљњзФ®йҐДеЃЪдєЙзЪДеІњеКњеИЭеІЛеМЦ
дЄЇдЇЖеЬ® SVL ж®°жЛЯеЩ® дЄ≠еЃЪдєЙзЪДж®°жЛЯзФЯжИРзВєеИЭеІЛеМЦжЬђеЬ∞еМЦпЉМиѓЈеЬ®жЦ∞зїИзЂѓдЄ≠иЊУеЕ•дї•дЄЛеСљдї§пЉЪ
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 topic pub --once /localization/initialpose geometry_msgs /msg /PoseWithCovarianceStamped "
{ж†ЗйҐШпЉЪ{
йВЃз•® пЉЪ {
зІТпЉЪ0пЉМ
зЇ≥зІТпЉЪ0
},
frame_idпЉЪвАЬеЬ∞еЫЊвАЭ
},
еІњеКњпЉЪ{
еІњеКњпЉЪ{
дљНзљЃ пЉЪ {
xпЉЪ-57.463пЉМ
yпЉЪ-41.644пЉМ
zпЉЪ-2.01пЉМ
},
жЦєеРС пЉЪ {
x: 0.0,
y: 0.0,
zпЉЪ-0.99917пЉМ
w: 0.04059,
},
},
еНПжЦєеЈЃпЉЪ[
0.25, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.25, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0, 0.068,
],
}}
" |
|








