SVL ن»؟çœںه™¨ï¼ڑن¸ژ Autoware.Auto ن¸€èµ·è؟گè،Œ SVL ن»؟çœںه™¨
SVL وک¯é¢هگ‘è‡ھهٹ¨é©¾é©¶و±½è½¦ه¼€هڈ‘ن؛؛ه‘کçڑ„هں؛ن؛ژ Unity çڑ„ه¤ڑوœ؛ه™¨ن؛؛ن»؟çœںه™¨م€‚ ه®ƒوڈگن¾›ن؛†ن¸€ن¸ھن»؟çœںن¸–ç•Œ
- ن¸؛ Autoware.Auto هˆ›ه»؛ن¼ و„ںه™¨è¾“ه…¥ï¼Œ
- ه…پ许用وˆ·و‰‹هٹ¨é©¾é©¶è‡ھوˆ‘车辆,类ن¼¼ن؛ژ电脑و¸¸وˆڈ,
- ه°†ه…¶ن»–移هٹ¨çڑ„ن؛¤é€ڑهڈ‚ن¸ژ者و”¾ç½®هœ¨هœ؛و™¯ن¸م€‚
وœ‰ه…³ن»؟çœںه™¨çڑ„و›´ه¤ڑن؟،وپ¯ï¼Œè¯·هڈ‚éک… https://www.svlsimulator.com/docs/getting-started/getting-started/ م€‚
è¦پو±‚
ن»¥ن¸‹وŒ‡هچ—هپ‡ه®ڑ SVL ن»؟çœںه™¨ه°†ن»ژ ADE ه®¹ه™¨ه†…è؟گè،Œï¼Œن½†ه¹¶éن¸¥و ¼è¦پو±‚م€‚
ن½؟用ن»؟çœںه™¨
ن½؟用ن»؟çœںه™¨و¶‰هڈٹن»¥ن¸‹و¥éھ¤ï¼ڑ
- هگ¯هٹ¨ه®ƒ
- é…چ置集群(ن¸€و¥ï¼‰
- 选و‹©وˆ–هˆ›ه»؛ن»؟çœں
- ه¼€ه§‹ن»؟çœں
وœ¬èٹ‚و¦‚è؟°ن؛†è؟™ن؛›و¥éھ¤م€‚ و‚¨è؟ک需è¦پن¸€ن¸ھ SVL ه¸گوˆ·و‰چ能ن½؟用ن»؟çœںه™¨ï¼Œه¦‚وœو‚¨و²،وœ‰ï¼Œè¯·ç«‹هچ³هœ¨ https://wise.svlsimulator.com/ . هگ¯هٹ¨ن»؟çœںه™¨
وŒ‰ç…§ه®‰è£…部هˆ† ن¸çڑ„说وکژه®‰è£… ADE ï¼ڑ
ن½؟用 SVL هچ·هگ¯هٹ¨ ADEï¼ڑ
$ cd ~/adehome/AutowareAuto
$ ade --rc .aderc-amd64-foxy-lgsvl ه¼€ه§‹ --update --enter |
选و‹©ن¸چهگŒçڑ„ .aderc-*-lgsvl و–‡ن»¶ن»¥و‰‹هٹ¨é€‰و‹© ROS 版وœ¬م€‚
è¦پهگ¯هٹ¨ SVL ن»؟çœںه™¨ï¼Œè¯·هœ¨هگŒن¸€ç»ˆç«¯çھ—هڈ£ن¸ï¼ڑ
| ade$ /opt/lgsvl/ن»؟çœںه™¨ |
و•…éڑœوژ’除
ه¦‚وœن»؟çœںه™¨çھ—هڈ£ن»¥é»‘ه±ڈو‰“ه¼€ه¹¶ن¸”ه؛”用程ه؛ڈç«‹هچ³ç»ˆو¢ï¼Œè¯·وں¥çœ‹و—¥ه؟—و–‡ن»¶
| ~/.config/unity3d/LGElectronics/SVLSimulator/Player.log |
ن¸€ç§چهڈ¯èƒ½çڑ„解ه†³و–¹و³•وک¯ن»ژ ADE ن¸هˆ 除ه†²çھپçڑ„ه›¾ه½¢é©±هٹ¨ç¨‹ه؛ڈ
| ade$ sudo apt remove mesa-vulkan-drivers |
ه¹¶ه†چو¬،هگ¯هٹ¨ن»؟çœںه™¨م€‚
ه¦‚وœç‚¹ن؛‘و•°وچ®وˆ–ه›¾هƒڈو•°وچ®وœھهœ¨ rviz ن¸هڈ¯è§†هŒ–,ن½†è¾¹ç•Œو،†ç‰ه…¶ن»–و•°وچ®هڈ¯è§پ,请هœ¨ ade ن¸è؟گè،Œن»¥ن¸‹ه‘½ن»¤ï¼Œ
| ade$ sudo apt remove mesa-vulkan-drivers |
é…چ置集群
و‚¨éœ€è¦پن½؟و‚¨çڑ„ ADE çژ¯ه¢ƒوˆگن¸؛وœ‰و•ˆçڑ„ SVL 集群و‰چ能هگ¯هٹ¨ن»»ن½•ن»؟çœںم€‚ è؟™وک¯ن¸€و¬،و€§é…چç½®و¥éھ¤م€‚
هœ¨و‚¨ç¬¬ن¸€و¬،è؟گè،Œن»؟çœںه™¨و—¶ï¼Œه؛”该وœ‰ن¸€ن¸ھهڈھوœ‰ن¸€ن¸ھوŒ‰é’®çڑ„çھ—هڈ£ï¼ڑ LINK TO CLOUD . هچ•ه‡»ه®ƒï¼Œ https://wise.svlsimulator.com/ ه؛”该ن¼ڑو‰“ه¼€ن¸€ن¸ھ Web وµڈ览ه™¨م€‚ و‚¨هڈ¯ن»¥é€ڑè؟‡وڈگن¾›é›†ç¾¤هگچ称ه¹¶هچ•ه‡» Create cluster وŒ‰é’®هœ¨é‚£é‡Œهˆ›ه»؛ن¸€ن¸ھو–°é›†ç¾¤م€‚
وœ‰ه…³é“¾وژ¥هˆ°ن؛‘çڑ„و›´ه¤ڑن؟،وپ¯ï¼ڑ و–‡و،£ م€‚ هˆ›ه»؛ن»؟çœں
هڈھ需هœ¨وµڈ览ه™¨ن¸هچ•ه‡»ه‡ ن¸‹هچ³هڈ¯هˆ›ه»؛ن»؟çœںم€‚ ن»¥ن¸‹و¥éھ¤هپ‡è®¾هگ¯هٹ¨وˆگهٹں,ه¹¶é€ڑè؟‡ Autonomous Valet Parking Demonstration çڑ„设置说وکژé…چç½®è؟‡ç¨‹م€‚
هگ¯هٹ¨وµڈ览ه™¨ه¹¶è½¬هˆ° SVL ن»؟çœںه™¨ Web ç•Œé¢ م€‚ و‚¨ه؛”该ه·²ç»ڈ设置ن؛†و‚¨çڑ„ه¸گوˆ·ï¼Œه› و¤è¯·ن½؟用ه±ڈه¹•هڈ³ن¸ٹ角çڑ„وŒ‰é’®ç™»ه½•م€‚
选و‹©هœ°ه›¾
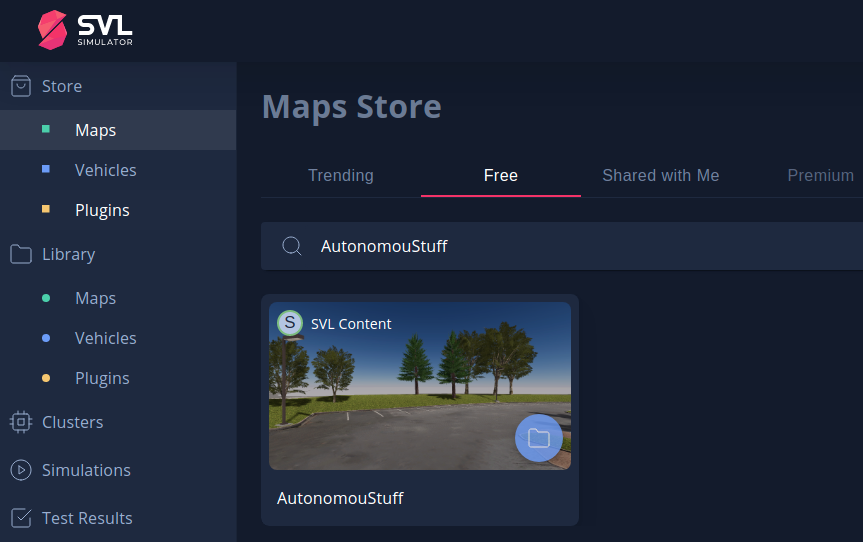
ç›®و ‡وک¯ه°† AutonomouStuff هپœè½¦هœ؛هœ°ه›¾و·»هٹ هˆ°و‚¨çڑ„ه›¾ن¹¦é¦†م€‚ ه¦‚وœè¯¥هœ°ه›¾ه·²ç»ڈهœ¨و‚¨çڑ„ه›¾ن¹¦é¦†ن¸ï¼Œهˆ™و— 需و‰§è،Œن»»ن½•و“چن½œم€‚
ه°†هœ°ه›¾و·»هٹ هˆ°و‚¨çڑ„ه›¾ن¹¦é¦†ï¼ڑ
- 转هˆ° Store -> Maps م€‚
- هچ•ه‡»هœ°ه›¾ + و—پè¾¹çڑ„وŒ‰é’® AutonomouStuff (و‚¨هڈ¯ن»¥ن½؟用وگœç´¢و ڈوŒ‰هگچ称è؟‡و»¤ï¼‰م€‚
选و‹©هœ°ه›¾
é…چ置车辆
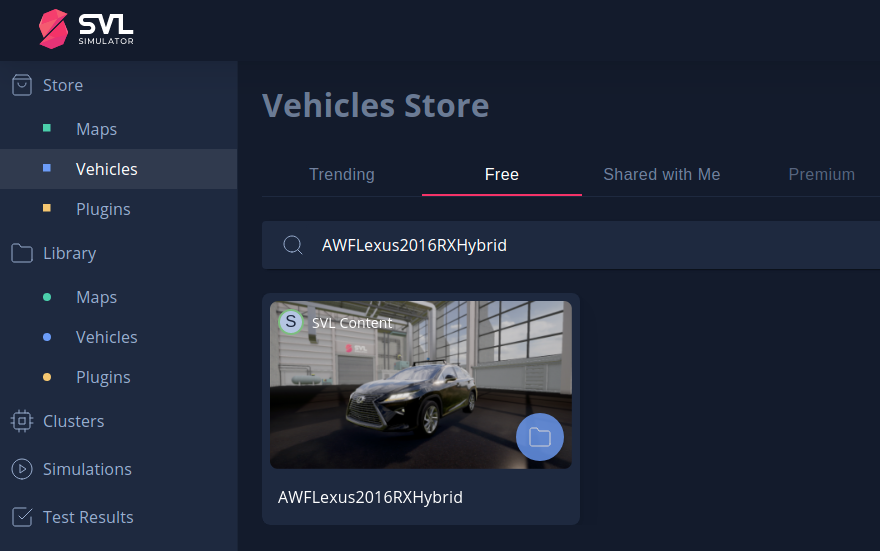
ç›®و ‡وک¯ه°† AWFLexus2016RXHybrid 车辆و·»هٹ هˆ°و‚¨çڑ„ه›¾ن¹¦é¦†م€‚ ه¦‚وœè؟™è¾†è½¦ه·²ç»ڈهœ¨و‚¨çڑ„ه›¾ن¹¦é¦†ن¸ï¼Œهˆ™و— 需و‰§è،Œن»»ن½•و“چن½œم€‚
ه°†è½¦è¾†و·»هٹ هˆ°و‚¨çڑ„ه›¾ن¹¦é¦†ï¼ڑ
- 转هˆ° Store -> Vehicles م€‚
- هچ•ه‡»è½¦è¾† + و—پè¾¹çڑ„وŒ‰é’® AWFLexus2016RXHybrid (و‚¨هڈ¯ن»¥ن½؟用وگœç´¢و ڈوŒ‰هگچ称è؟‡و»¤ï¼‰م€‚
و·»هٹ 车辆
و·»هٹ ROS2ForUnitySVLBridge
ç›®و ‡وک¯ه°†هژںç”ں ROS2 و،¥و·»هٹ هˆ°و‚¨çڑ„ه؛“ن¸م€‚ ه¦‚وœو¤و،¥ه·²هœ¨و‚¨çڑ„ه؛“ن¸ï¼Œهˆ™و— 需و‰§è،Œن»»ن½•و“چن½œï¼ڑ
و‚¨ن¹ںهڈ¯ن»¥ ROS2ForUnitySVLBridge ن½؟用وگœç´¢و ڈè؟›è،Œوگœç´¢م€‚
é…چ置车辆ن¼ و„ںه™¨
ه°†è½¦è¾†و·»هٹ هˆ°ه؛“هگژï¼ڑ
- 转هˆ° Library -> Vehicles م€‚
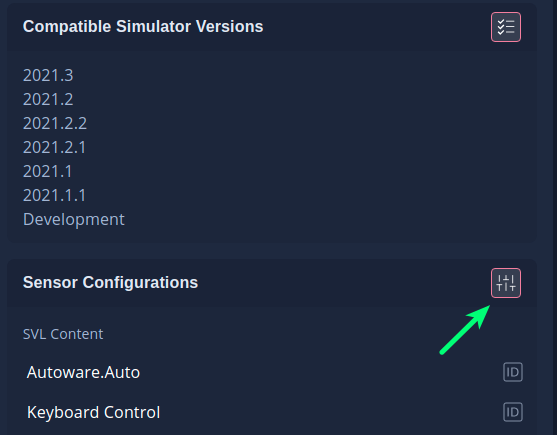
- 点ه‡» AWFLexus2016RXHybrid ه¤´هƒڈم€‚ و‚¨ه°†è¢«è½¬è‡³è½¦è¾†ç¼–辑é،µé¢م€‚
- هچ•ه‡» Sensor Configurations 部هˆ†é™„è؟‘çڑ„وŒ‰é’®ن»¥ن؟®و”¹ن¼ و„ںه™¨é…چç½®م€‚
é…چç½®ن¼ و„ںه™¨
请و³¨و„ڈ,ه·²ç»ڈوœ‰ن¸€ن¸ھ Autoware.Auto é…چç½®م€‚ ن¸؛ن؛†ç،®ن؟وˆ‘ن»¬è؟گè،Œçڑ„وک¯وœ€و–°ç‰ˆوœ¬ï¼Œوœ€ه¥½هˆ›ه»؛ن¸€ن¸ھو–°ç‰ˆوœ¬ه¹¶ن½؟用وœ€و–°ç‰ˆوœ¬çڑ„ن¼ و„ںه™¨é…چç½®و–‡ن»¶ï¼ڑ
- 点ه‡» + Create New Configuration é،µé¢ه؛•éƒ¨çڑ„وŒ‰é’®م€‚
- 设置é…چç½®هگچ称ه¹¶é€‰و‹© ROS2ForUnitySVLBridge ن½œن¸؛网و،¥م€‚ è؟™وک¯ ROS2 و،¥وژ¥ه™¨çڑ„وœ¬وœ؛ه®çژ°م€‚
- ç،®è®¤م€‚
هœ¨é…چ置编辑视ه›¾ن¸ï¼ڑ
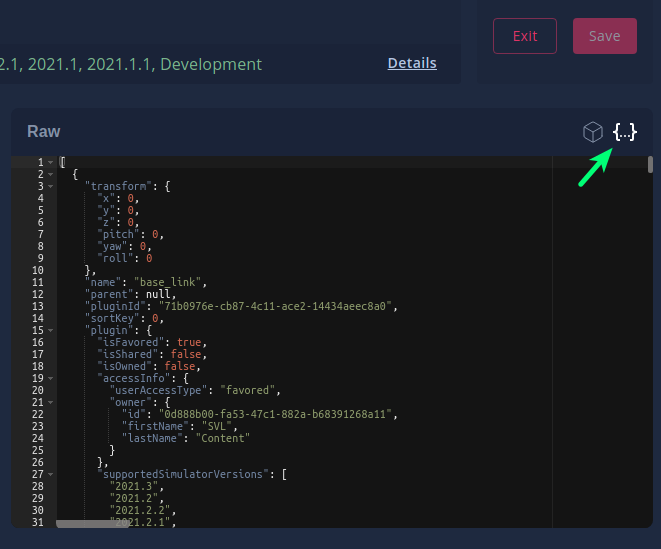
- هچ•ه‡» {...} هڈ¯è§†هŒ–编辑ه™¨ï¼ˆé¢„览)çھ—هڈ£é™„è؟‘çڑ„符هڈ·م€‚
- ه°†avp-sensors.json و–‡ن»¶çڑ„ه†…ه®¹ç²کè´´ هˆ°ç¼–辑çھ—هڈ£ن¸م€‚ Configurator çھ—هڈ£çژ°هœ¨ه؛”该ه،«ه……ن¸€ه †ن¼ و„ںه™¨م€‚
- هچ•ه‡» Save ن»¥ن؟هکé…چç½®م€‚
jsoné…چç½®و–‡ن»¶
而ه·²م€‚ çژ°هœ¨و‚¨و‹¥وœ‰ن¸€è¾†ه…·وœ‰وœ‰و•ˆé…چç½®çڑ„车辆م€‚
选و‹©/هˆ›ه»؛ن»؟çœں
SVL ن»؟çœںه™¨ه…پ许و‚¨هکه‚¨ه’Œé‡چه¤چن½؟用ه¤ڑن¸ھن»؟çœںé…چç½®م€‚ è¦پن½؟用çژ°وœ‰ن»؟çœں,请ه¯¼èˆھهˆ° Simulations 选é،¹هچ،ه¹¶وŒ‰و‰€éœ€ه®ن¾‹çڑ„“è؟گè،Œن»؟çœںâ€وŒ‰é’®م€‚ ن»؟çœںه™¨çژ°هœ¨ه؛”该هœ¨ SVL çھ—هڈ£ن¸هگ¯هٹ¨م€‚
è¦پهˆ›ه»؛و–°çڑ„ن»؟çœں,请وŒ‰ç…§ن»¥ن¸‹و¥éھ¤و“چن½œم€‚
笔记 هڈ¯èƒ½وœ‰ن¸€ن؛› AutowareAuto و¼”ç¤؛é»ک认ن½؟用è‡ھه·±çڑ„预设ن»؟çœں,è؟™هˆ©ç”¨ن؛† LGSVL APIم€‚ è؟™ه°†è‡ھهٹ¨ه°†ن»؟çœںé…چç½®ن¸؛و¼”ç¤؛çڑ„وژ¨èچگ设置م€‚ ه¯¹ن؛ژè؟™ç§چوƒ…ه†µï¼Œو‚¨éœ€è¦پهˆ›ه»؛ن¸€ن¸ھن»… API ن»؟çœںم€‚
- هˆ‡وچ¢هˆ° Simulations 选é،¹هچ،,点ه‡» Add new وŒ‰é’®ï¼›
- 输ه…¥هگچ称م€پوڈڈè؟°ه¹¶é€‰و‹©ن¸€ن¸ھ集群م€‚ 点ه‡» Next ï¼›
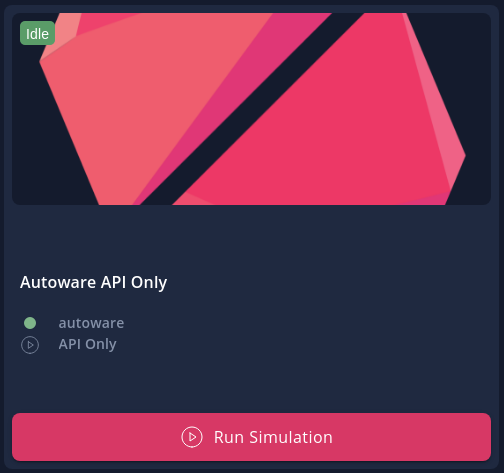
- ه¯¹ن؛ژ预设ن»؟çœںï¼ڑ
- API Only ن»ژن¸‹و‹‰èڈœهچ•ن¸ 选و‹©è؟گè،Œو—¶و¨،و؟م€‚
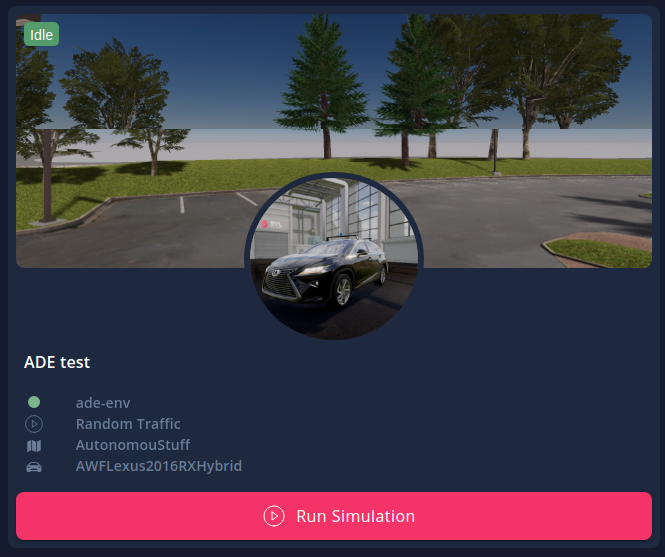
وˆ–è‡ھه®ڑن¹‰ن»؟çœںï¼ڑ
- Random Traffic ن»ژن¸‹و‹‰èڈœهچ•ن¸ 选و‹©è؟گè،Œو—¶و¨،و؟ï¼›
- ن½؟用و‚¨çڑ„ن¼ و„ںه™¨é…چç½® 选و‹© AutonomouStuff هœ°ه›¾ه’Œè½¦è¾†م€‚ AWFLexus2016RXHybrid 点ه‡» Next ï¼›
- 选و‹© Other ROS 2 Autopilot è‡ھهٹ¨é©¾é©¶ن»ھه¹¶ن؟ç•™ Bridge Connection é»ک认ه€¼م€‚
- هچ•ه‡» Next ,然هگژهچ•ه‡» Publish م€‚
و‚¨هڈ¯ن»¥è®؟é—® SVL و–‡و،£ ن»¥èژ·ه¾—و›´و·±ه…¥çڑ„وڈڈè؟°م€‚ ه¼€ه§‹ن»؟çœں
هˆ›ه»؛ن»؟çœںهگژ,و‚¨هڈ¯ن»¥é€ڑè؟‡هچ•ه‡» 视ه›¾ Run Simulation ن¸ن»؟çœںé…چç½®ه°ڈ部ن»¶و—پè¾¹çڑ„وŒ‰é’®و¥è؟گè،Œه®ƒم€‚ Simulations
ه¼€ه§‹ن»؟çœں,预设ن»؟çœں
ه¼€ه§‹ن»؟çœں,è‡ھه®ڑن¹‰ن»؟çœں
预设ن»؟çœں
API Ready و–‡وœ¬ه؛”ه‡؛çژ°هœ¨ SVL Simulator çھ—هڈ£ن¸ï¼ˆè€Œن¸چوک¯وµڈ览ه™¨ن¸ï¼‰ م€‚
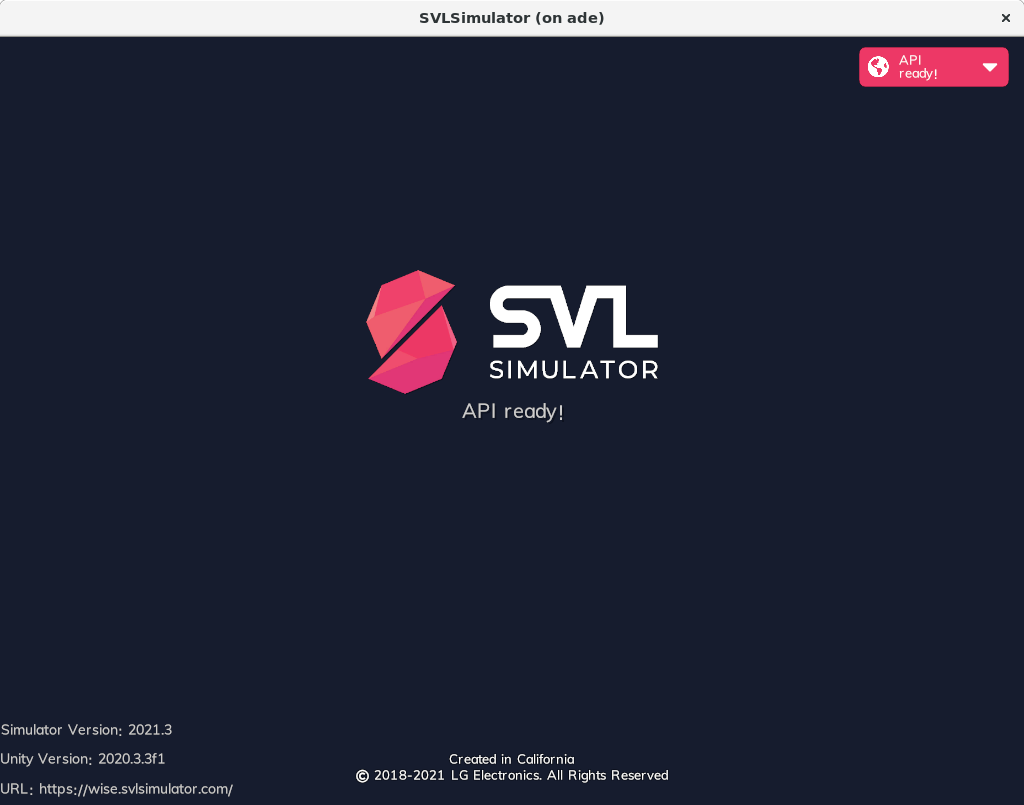
API Ready ن»؟çœںه™¨è§†ه›¾
وپه–œï¼Œه¦‚وœهˆ°ç›®ه‰چن¸؛و¢ن¸€هˆ‡و£ه¸¸م€‚ SVL 设置ه®Œوˆگم€‚
è‡ھه®ڑن¹‰ن»؟çœں
é›·ه…‹èگ¨و–¯ه؛”该ه‡؛çژ°هœ¨ SVL Simulator çھ—هڈ£ن¸ï¼ˆè€Œن¸چوک¯هœ¨وµڈ览ه™¨ن¸ï¼‰م€‚
ن¸‹ن¸€و¥وک¯وژ§هˆ¶é›·ه…‹èگ¨و–¯ه¹¶ه››ه¤„è،Œé©¶م€‚ وŒ‰ن¸‹ F1 هڈ¯وں¥çœ‹ه؟«وچ·و–¹ه¼ڈهˆ—è،¨ï¼Œç„¶هگژوŒ‰ن¸‹ه·¦ن¸‹è§’çڑ„ cookie وŒ‰é’®ن»¥èژ·هڈ–و›´ه¤ڑ UI وژ§ن»¶م€‚
هں؛وœ¬ه‘½ن»¤وک¯ن½؟用ç®ه¤´é”®و¥è½¬هگ‘ه’Œهٹ é€ں,ن½؟用 Page Up ه’Œ Page Down é”®هœ¨ه‰چè؟›ه’Œهگژ退ن¹‹é—´هˆ‡وچ¢م€‚
وپه–œï¼Œه¦‚وœهˆ°ç›®ه‰چن¸؛و¢ن¸€هˆ‡و£ه¸¸م€‚ SVL 设置ه®Œوˆگم€‚
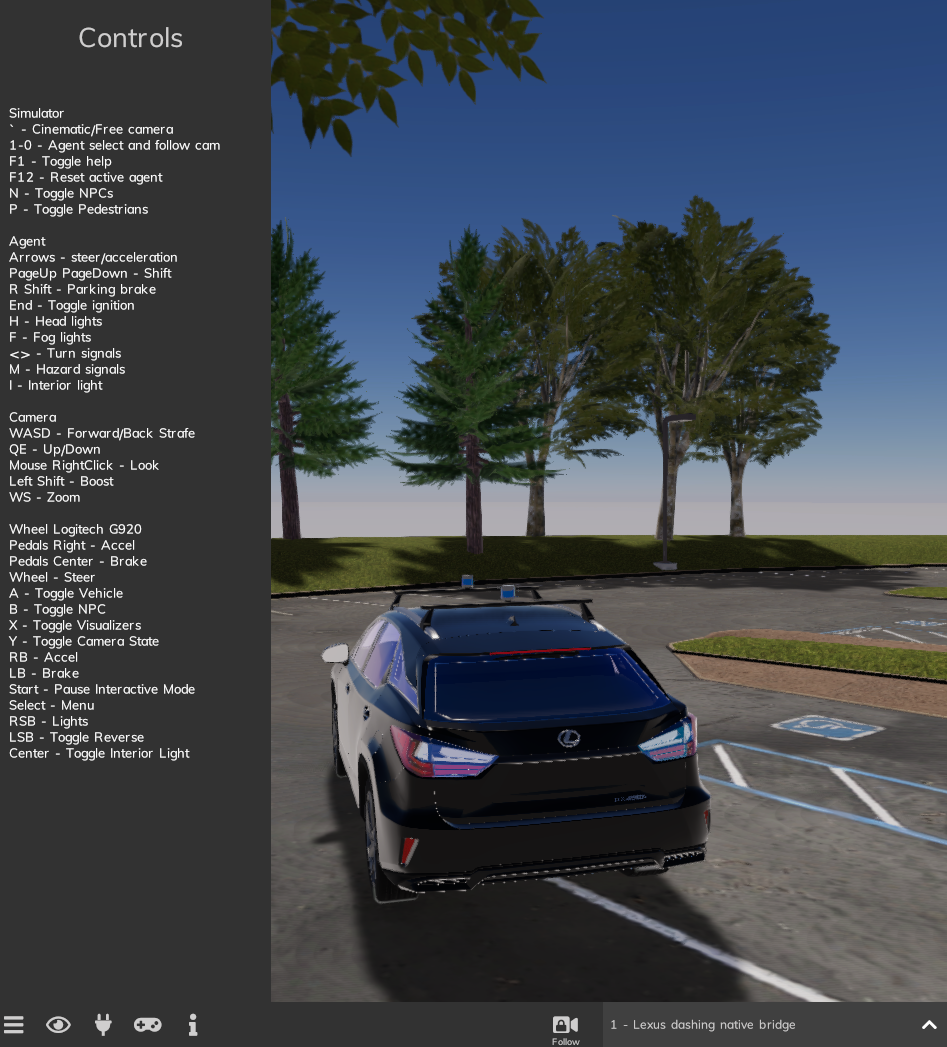
وژ§هˆ¶é›·ه…‹èگ¨و–¯
ن¸ژ Autoware.Auto و،¥وژ¥
SVL ن½؟用ن¸ژ ROS 2 ç؛¦ه®ڑن¸چç›´وژ¥ن¸€è‡´çڑ„ç؛¦ه®ڑم€‚ ه®çژ°çڑ„è،Œن¸؛çڑ„ه®Œو•´هˆ—è،¨
lgsvl_interface وک¯ï¼ڑ
- ه°† CCW و£هگ‘و—‹è½¬çڑ„وژ§هˆ¶è¾“ه…¥è½¬وچ¢ن¸؛ SVL ن»؟çœںه™¨و‰€وœںوœ›çڑ„ CCW è´ںهگ‘输ه…¥
- VehicleControlCommand é€ڑè؟‡هڈ¯هڈ‚و•°هŒ–çڑ„ن¸€ç»´وں¥و‰¾è،¨وڈگن¾›ن»ژ RawControlCommand SVL 预وœں çڑ„وک ه°„
è¦پ lgsvl_interface و‰‹هٹ¨è؟گè،Œï¼Œè¯·هœ¨و–°çڑ„终端çھ—هڈ£ن¸è¾“ه…¥ن»¥ن¸‹ه†…ه®¹ï¼ڑ
$ ade 输ه…¥
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 è؟گè،Œ lgsvl_interface lgsvl_interface_exe --ros-args --params-file /opt/AutowareAuto/share/lgsvl_interface/param/lgsvl.param.yaml |
Autoware.Auto ن½؟用 PointCloud2 و¶ˆوپ¯ x,y,z,intensity 而ن¸چوک¯ x,y,z,intensity,timestamp ه—و®µم€‚
该èٹ‚点ه°†è½¬وچ¢ points_xyzi
è؟گè،Œ point_type_adapter ن»¥è½¬وچ¢و¶ˆوپ¯م€‚
$ ade 输ه…¥
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 هگ¯هٹ¨ç‚¹_type_adapter point_type_adapter.launch.py |
وœ‰ه…³ن½؟用 VehicleControlCommand SVL çڑ„ç¤؛ن¾‹ï¼Œè¯·هœ¨و–°çڑ„终端çھ—هڈ£ن¸è؟گè،Œن»¥ن¸‹و¼”ç¤؛ï¼ڑ
$ ade 输ه…¥
ade$ source /opt/AutowareAuto/setup.bash
ade$ ros2 هگ¯هٹ¨ lgsvl_interface lgsvl_vehicle_control_command.launch.py |
هœ¨ LGSVL ن¸ٹè؟گè،Œ Autoware و“چç؛µو†و¼”ç¤؛
è¦پوµ‹è¯• Autoware ه’Œ LGSVL ه®‰è£…,请وŒ‰ç…§ن»¥ن¸‹è¯´وکژن½؟用 Autoware هœ¨ LGSVL ن¸ن½؟用و“چç؛µو†é©¾é©¶è½¦è¾†م€‚
ه‡†ه¤‡ن¸€ن¸ھو“چç؛µو†م€‚ ه¤§ه¤ڑو•°و¸¸وˆڈو†éƒ½هڈ¯ن»¥هœ¨ /dev/input/js0 . Autoware هژںç”ںو”¯وŒپç½—وٹ€ F310 و‘‡و†ï¼Œه…¶وک ه°„و–‡ن»¶هڈ¯ن»¥هœ¨ joystick_vehicle_interface_nodes هŒ…ن¸و‰¾هˆ°م€‚
ه¯¹ن؛ژه…¶ن»–و¸¸وˆڈو†ï¼Œéœ€è¦پهˆ›ه»؛ç±»ن¼¼çڑ„وک ه°„و–‡ن»¶م€‚
هپœو¢ن»»ن½•و£هœ¨è؟گè،Œçڑ„ ADE ه®¹ه™¨ï¼ڑ
هپœو¢
هگ¯هٹ¨ن¸€ن¸ھو–°çڑ„ ADE ه®¹ه™¨ه¹¶ه°†و“چç؛µو†è®¾ه¤‡ن¼ 递给ه®ƒï¼Œهپ‡è®¾ js0 وک¯و‚¨çڑ„و“چç؛µو†è®¾ه¤‡م€‚ 然هگژهگ¯هٹ¨ن»؟çœںه™¨ï¼ڑ
$ ade --rc .aderc-amd64-foxy-lgsvl ه¼€ه§‹ --update --enter -- --device /dev/input/js0
ade$ /opt/lgsvl/ن»؟çœںه™¨ |
هœ¨ LGSVL ن¸ï¼Œهˆ›ه»؛ه¹¶هگ¯هٹ¨ن¸ٹè؟°ن»؟çœںهœ؛و™¯م€‚
وœ€هگژ,هœ¨و–°ç»ˆç«¯ن¸هگ¯هٹ¨ Autoware و“چç؛µو†و¼”ç¤؛ï¼ڑ
$ ade 输ه…¥
ade$ source /opt/AutowareAuto/setup.bash
# ه¦‚وœو‚¨ن½؟用çڑ„وک¯ç½—وٹ€ F310 و“چç؛µو†ï¼ڑ
ade$ ros2 هگ¯هٹ¨ joystick_vehicle_interface_nodes lgsvl_joystick.launch.py
# وˆ–者,ه¦‚وœو‚¨وœ‰è‡ھه®ڑن¹‰و“چç؛µو†وک ه°„ï¼ڑ
ade$ ros2 هگ¯هٹ¨ joystick_vehicle_interface_nodes lgsvl_joystick.launch.py​​ joy_translator_param:=/path/to/your/joystick/config.param.yaml |
|








