هںںوڈڈè؟°
该 common هگç›®ه½•هŒ…هگ«èٹ‚点ه’Œه؛“,ه…¶هٹں能由 Autoware.Auto ç³»ç»ںن¸çڑ„许ه¤ڑهŒ…ه…±ن؛«م€‚ ن¸ه؟ƒé،µé¢
mpark_variant_vendor
è؟™وک¯ mpark_variant_vendor هŒ…装çڑ„设è®،و–‡ن»¶م€‚ è؟™ن¸ھهŒ…وک¯هœ¨ mpark::variant è؟™é‡Œو‰¾هˆ°çڑ„ن¸€ن¸ھ简هچ•çڑ„هŒ…装ه™¨ï¼ڑ https ://github.com/mpark/variant
ç¥ç»ڈ网络设è®،
ç›®çڑ„/用ن¾‹
该软ن»¶هŒ…ن¸؛ن½؟用ه®ƒن»¬è؟›è،Œوژ¨çگ†çڑ„软ن»¶هŒ…وڈگن¾›ن؛†é¢„编译çڑ„ç¥ç»ڈ网络م€‚
设è®،
ç¥ç»ڈ网络被编译ن¸؛ Model Zoo CI ç®،éپ“çڑ„ن¸€éƒ¨هˆ†ï¼Œه¹¶ن؟هکهˆ° S3 هکه‚¨و،¶ن¸م€‚ DOWNLOAD_ARTIFACTS هœ¨è®¾ç½®هڈکé‡ڈ و—¶و„ه»؛و¤هŒ…و—¶ن¸‹è½½ه¹¶ه®‰è£…ه®ƒن»¬م€‚
用وˆ·هڈ¯ن»¥é€ڑè؟‡è؟™ن¸ھهŒ…وڈگن¾›è‡ھه·±ç¼–译çڑ„网络,وˆ–者é€ڑè؟‡هˆ›ه»؛ن¸€ن¸ھ user ç›®ه½•ه¹¶ن½؟用相هگŒçڑ„ç›®ه½•ç»“و„و¥è¦†ç›–预编译çڑ„网络م€‚
结و„ه¦‚ن¸‹ï¼ڑ
├── ${ARCH 1}
│ ├── ${ه‹هڈ·1}
│ │ ├── ${BACKEND 1}
│ │ │ ├── deploy_graph.json
│ │ │ ├── deploy_lib.so
│ │ │ ├── deploy_param.params
│ │ │ └── وژ¨çگ†ï¼‰_engine_tvm_config.hpp
│ │ └── ${BACKEND ...}
│ │ └── ...
│ └── ${MODEL ...}
│ └── ...
└── ${ARCH ...}
└── ... |
预编译çڑ„网络ن»…هœ¨ç¬¬ن¸€و¬،و„ه»؛و¤هŒ…و—¶ن¸‹è½½م€‚ è¦پé‡چو–°è§¦هڈ‘ن¸‹è½½و¥éھ¤ï¼Œç”¨وˆ·هڈ¯ن»¥هˆ 除هŒ…çڑ„و„ه»؛ç›®ه½•م€‚
هپ‡è®¾/ه·²çں¥é™گهˆ¶
و„ه»؛و—¶éœ€è¦پن؛’èپ”网è؟وژ¥م€‚
输ه…¥/输ه‡؛/API
输ه…¥ï¼ڑ
- DOWNLOAD_ARTIFACTS 需è¦پ设置هڈکé‡ڈن»¥هگ¯ç”¨ن¸‹è½½ه·¥ن»¶
输ه‡؛ï¼ڑ
- neural_networks_NETWORKS_DIR هŒ…هگ«ç½‘络و ¹ç›®ه½•è·¯ه¾„çڑ„هڈکé‡ڈ
- neural_networks_NAMES هŒ…هگ«هڈ¯ç”¨ç½‘络هˆ—è،¨çڑ„هڈکé‡ڈ
APIï¼ڑو—
错误و£€وµ‹ه’Œه¤„çگ†
و„ه»؛هŒ…ن¸چن¼ڑه¤±è´¥م€‚ ه¦‚وœو²،وœ‰هڈ¯ç”¨ن؛ژç›®و ‡و¶و„çڑ„و¨،ه‹ï¼Œهˆ™ن¼ڑوک¾ç¤؛ن¸€و،و—¥ه؟—و¶ˆوپ¯م€‚
ه®‰ه…¨و³¨و„ڈن؛‹é،¹
预编译çڑ„网络وک¯ن»ژ S3 هکه‚¨و،¶ن¸‹è½½çڑ„,ه¹¶هڈ—هˆ°و¬؛éھ—م€پç¯،و”¹ه’Œو‹’ç»وœچهٹ،çڑ„ه¨پèƒپم€‚ ن½؟用 https è؟وژ¥هڈ¯ن»¥ه‡ڈè½»و¬؛éھ—م€‚ ç¯،و”¹ه’Œو‹’ç»وœچهٹ،çڑ„缓解وژھو–½ç•™ç»™ AWSم€‚
用وˆ·وڈگن¾›çڑ„网络ه®‰è£…هœ¨ن¸»وœ؛ç³»ç»ںن¸ٹم€‚ 用وˆ·è´ںè´£ن؟وٹ¤ن»–ن»¬وڈگن¾›çڑ„وœ‰ه…³ن؟،وپ¯وٹ«éœ²çڑ„و–‡ن»¶م€‚
相ه…³é—®é¢ک
- #721ï¼ڑAutoware.auto ن¸çڑ„وœ؛ه™¨ه¦ن¹ وژ¨çگ†و،†و¶
ه™ھه£°و¨،ه‹è®¾è®،
ç›®çڑ„/用ن¾‹
هچ،ه°”و›¼و»¤و³¢ه™¨ï¼ˆè¯·هڈ‚éک…çٹ¶و€پè؟‡و»¤ï¼ˆçٹ¶و€پن¼°è®،) )و‰€éœ€çڑ„و„ه»؛ه—ن¹‹ن¸€ وک¯è؟‡ç¨‹ه™ھه£°و¨،ه‹م€‚ هœ¨وœ¬و–‡و،£ن¸ï¼Œوˆ‘ن»¬و¶µç›–ن؛†وœ‰ه…³ه¦‚ن½•ه¯¹ه™ھه£°è؟›è،Œه»؛و¨،ن»¥هڈٹوœ¬é،¹ç›®ن¸ن½؟用ه“ھن؛›و–¹و³•çڑ„ن¸چهگŒو–¹و³•çڑ„相ه…³و–‡و،£م€‚
设è®،
و‰€وœ‰ه™ھه£°و¨،ه‹éƒ½éپµه¾ھه®ڑن¹‰هœ¨ ن¸çڑ„ه¥‡و€ھé‡چه¤چو¨،و؟و¨،ه¼ڈ (CRTP) وژ¥هڈ£ autoware::common::state_estimation::NoiseInterface ,该وژ¥هڈ£وœ¬è´¨ن¸ٹه…پ许ه°†ن»¥ن¸‹ه‡½و•°ن¸ژéپµه¾ھو¤وژ¥هڈ£çڑ„ن»»ن½•ه™ھه£°و¨،ه‹ن¸€èµ·ن½؟用ï¼ڑ
| è‡ھهٹ¨ هچڈو–¹ه·®( const std::chrono::nanoseconds & dt) const ; |
ç”±ن؛ژ该وژ¥هڈ£وک¯وŒ‰ç…§ CRTP و¨،ه¼ڈه®çژ°çڑ„,ه› و¤ه®çژ°è¯¥وژ¥هڈ£çڑ„و‰€وœ‰ç±»éƒ½ه؟…é،»ه®çژ°ن¸€ن¸ھه‡½و•°ï¼Œè¯¥ه‡½و•° crtp_covariance è؟”ه›ç»™ه®ڑçٹ¶و€پهگ‘é‡ڈçڑ„è؟‡ç¨‹ه™ھه£°هچڈو–¹ه·®م€‚ هœ¨ه†…部,è؟™ن¸ھه‡½و•°ه°†ن»ژ NoiseInterface ç±»ن¸è°ƒç”¨م€‚
ç›®ه‰چه®çژ°çڑ„ه…·ن½“ه®çژ°ï¼ڑ
ن»¥ن¸‹وک¯وœ‰ه…³ه…¶ه®و–½çڑ„详细ن؟،وپ¯م€‚
ه‡هŒ€ه™ھه£°و¨،ه‹
该类 autoware::common::state_estimation::UniformNoise ه®çژ°ن؛†ç»ںن¸€ه™ھه£°çڑ„简هچ•و¨،ه‹م€‚ ه®ƒوژ¥و”¶ن¸چهگŒهڈکé‡ڈçڑ„و–¹ه·®وˆ–ه®Œو•´çڑ„هچڈو–¹ه·®çں©éکµï¼Œه¹¶هœ¨ه†…部هکه‚¨و¤هچڈو–¹ه·®ï¼Œه¹¶هœ¨وں¥è¯¢هچڈو–¹ه·®و—¶è؟”ه›ï¼ˆه¹¶وŒ‰ç»ڈè؟‡و—¶é—´ç¼©و”¾ï¼‰م€‚
ç»´ç؛³ه™ھه£°و¨،ه‹
该类 autoware::common::state_estimation::WienerNoise ه®çژ°ن؛†و‰€è°“çڑ„ç»´ç؛³ه™ھه£°و¨،ه‹ï¼ˆهڈ‚è§پ و¤ه¤„ ن»¥ن¾›هڈ‚考)م€‚ ه®ƒèƒŒهگژçڑ„و ¸ه؟ƒو€وƒ³وک¯ç”¨وˆ·هڈھوŒ‡ه®ڑهٹ é€ںه؛¦çڑ„ه™ھه£°ï¼Œه¹¶ن¸”è؟™ç§چه™ھه£°é€ڑè؟‡è؟گهٹ¨و¨،ه‹ن¼ و’هˆ°ه…¶ن»–ن½ژéک¶هڈکé‡ڈم€‚
错误و£€وµ‹ه’Œه¤„çگ†
ه¾…ه®ڑ
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
ه¦‚وœéœ€è¦پ,هڈ¯ن»¥ه®çژ°و›´ه¤ڑçڑ„è؟گهٹ¨و¨،ه‹
OSQP ه؛“çڑ„وژ¥هڈ£
è؟™وک¯ osqp_interface هŒ…装çڑ„设è®،و–‡ن»¶م€‚
ç›®çڑ„/用ن¾‹
该软ن»¶هŒ…ن¸؛ OSQP ه؛“ وڈگن¾›ن؛† C++ وژ¥هڈ£م€‚
设è®،
该类 OSQPInterface ه°†é—®é¢که…¬ه¼ڈهŒ–ن¸؛特ه¾پçں©éکµه’Œهگ‘é‡ڈ,ه°†è؟™ن؛›ه¯¹è±،转وچ¢ن¸؛ C é£ژو ¼çڑ„هژ‹ç¼©هˆ—稀ç–ڈçں©éکµه’Œهٹ¨و€پو•°ç»„,ه°†و•°وچ®هٹ è½½هˆ° OSQP ه·¥ن½œهŒ؛و•°وچ®ن؟وŒپه™¨ن¸ï¼Œه¹¶è؟گè،Œن¼کهŒ–ه™¨م€‚
输ه…¥/输ه‡؛/API
该وژ¥هڈ£هڈ¯ن»¥é€ڑè؟‡ه¤ڑç§چو–¹ه¼ڈن½؟用ï¼ڑ
- هˆه§‹هŒ–و²،وœ‰و•°وچ®çڑ„وژ¥هڈ£م€‚ هœ¨ن¼کهŒ–调用ن¸هٹ 载问é¢که…¬ه¼ڈم€‚ osqp_interface = OSQPInterface(); osqp_interface.optimize(P, A, q, l, u);
- 用و•°وچ®هˆه§‹هŒ–وژ¥هڈ£م€‚ osqp_interface = OSQPInterface(P, A, q, l, u); osqp_interface.optimize();
- é€ڑè؟‡ن؟®و”¹ن¼کهŒ–è؟گè،Œن¹‹é—´çڑ„é—®é¢که…¬ه¼ڈو¥è؟›è،Œçƒهگ¯هٹ¨ن¼کهŒ–م€‚ osqp_interface = OSQPInterface(P, A, q, l, u); osqp_interface.optimize(); osqp.initializeProblem(P_new,A_new,q_new,l_new,u_new); osqp_interface.optimize();
ن¼کهŒ–ه‡½و•°ه°†ن¼کهŒ–结وœن½œن¸؛هگ‘é‡ڈè؟”ه›م€‚
std::tuple<std::vector<double>, std::vector<double>> 结وœ = osqp_interface.optimize(); std::vector<double> هڈ‚و•° = std::get<0>(result); هڈŒ x_0 = هڈ‚و•° [0]; هڈŒ x_1 = هڈ‚و•° [1];
هڈ‚考/ه¤–部链وژ¥
相ه…³é—®é¢ک
هڈ‚考è·ںè¸ھوژ§هˆ¶ه™¨è®¾è®،
ç›®çڑ„/用ن¾‹
è؟™ن¸ھهŒ…و—¨هœ¨وڈگن¾›ن¸€ن¸ھé€ڑ用 API ه’Œن¸€ن؛›ç®€هچ•وژ§هˆ¶ه™¨çڑ„é€ڑ用ه®çژ°ï¼Œن¾‹ه¦‚ PID وژ§هˆ¶ه™¨م€‚ è؟™ن؛›وژ§هˆ¶ه™¨çڑ„ç›®çڑ„وک¯وڈگن¾›ن¸€ç»´ن؟،هڈ·çڑ„简هچ•هڈچ馈وژ§هˆ¶م€‚
设è®،
وڈگن¾›ن؛†ن¸€ن¸ھ简هچ•çڑ„ç•Œé¢م€‚ ه®çژ°هڈ¯èƒ½وک¯وœ‰çٹ¶و€پçڑ„وˆ–و— çٹ¶و€پçڑ„م€‚ ه¦‚وœéœ€è¦په¤ڑ维输ه…¥وˆ–输ه‡؛,هˆ™ه؛”وڈگن¾›ن¸چهگŒçڑ„ API,وˆ–者ه؛”و‰©ه±•وڈگن¾›çڑ„ APIم€‚
API هڈ¯ن»¥هœ¨ API و–‡و،£ ن¸çœ‹هˆ°م€‚
هپ‡è®¾/ه·²çں¥é™گهˆ¶
و¤ API ه½“ه‰چهپ‡ه®ڑن¸€ç»´è¾“ه‡؛ه’Œن¸€ç»´è¾“ه…¥ï¼Œهڈ¯èƒ½ه…·وœ‰هچ•ن¸ھه¯¼و•°م€‚
ه¦‚وœو²،وœ‰وڈگن¾›ه¯¼و•°ï¼Œهˆ™هپ‡ه®ڑه®ƒن»¬ن¸؛零(هچ³é›¶éک¶ن؟وŒپ)م€‚
输ه…¥/输ه‡؛/API
API هڈ¯ن»¥هœ¨ API و–‡و،£ ن¸çœ‹هˆ°م€‚
ه†…部ه·¥ن½œ/ç®—و³•
ç›®ه‰چ,è؟™ن¸ھهŒ…هڈھهŒ…هگ«ن¸€ن¸ھو²،وœ‰é€»è¾‘çڑ„وژ¥هڈ£ه®ڑن¹‰م€‚
错误و£€وµ‹ه’Œه¤„çگ†
ç›®ه‰چ,è؟™ن¸ھهŒ…هڈھهŒ…هگ«ن¸€ن¸ھو²،وœ‰é€»è¾‘çڑ„وژ¥هڈ£ه®ڑن¹‰م€‚
ه®‰ه…¨و³¨و„ڈن؛‹é،¹
هڈ‚考/ه¤–部链وژ¥
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
- ه°†ه®çژ° PID وژ§هˆ¶ه™¨ï¼Œ#4999
相ه…³é—®é¢ک
ن؟،هڈ·و»¤و³¢ه™¨è®¾è®،
ç›®çڑ„/用ن¾‹
ن¸€ن؛›ç®—و³•وˆ–组ن»¶ه…·وœ‰ï¼ˆهگˆçگ†هœ°ï¼‰ه¹³و»‘هڈکهŒ–çڑ„输ه…¥ن؟،هڈ·çڑ„éڑگهگ«هپ‡è®¾م€‚ هڈ¦ن¸€ç§چ看ه¾…è؟™ن¸€ç‚¹çڑ„و–¹ه¼ڈوک¯ï¼Œن¸€ن¸ھ组ن»¶هڈ¯èƒ½ه¯¹ن¸چهگŒçڑ„频هںںوœ‰ن¸چ良ه“چه؛”م€‚
ن¸؛ن؛†éپ؟ه…چè؟™ن؛›ن¸چ良ه“چه؛”,é‡چè¦پçڑ„وک¯ن½؟用و»¤و³¢ه™¨ï¼ˆهœ¨ن؟،هڈ·ه¤„çگ†و„ڈن¹‰ن¸ٹ)و¥و‹’ç»م€پهژ»é™¤وˆ–è،°ه‡ڈن؟،هڈ·ن¸çڑ„وںگن؛›é¢‘çژ‡م€‚
设è®،
وڈگن¾›ن؛†ن¸€ن¸ھ简هچ•çڑ„ç•Œé¢م€‚ هپ‡ه®ڑو¤وژ¥هڈ£çڑ„ه®çژ°وک¯وœ‰çٹ¶و€پçڑ„ه’Œç¦»و•£و—¶é—´çڑ„م€‚
API هڈ¯ن»¥هœ¨ API و–‡و،£ ن¸çœ‹هˆ°م€‚
هں؛ç±»وœ‰ن¸€ن؛›è¾“ه…¥و¸…çگ†é€»è¾‘,ه› و¤ه®çژ°ن¸چ需è¦پé‡چو–°ه®çژ°è؟™ن¸ھ逻辑م€‚
و¤ه¤–,ن¸؛ن؛†ن¾؟ن؛ژن½؟用,ن½؟用ن؛†و ‡ه‡†ه¤ڑو€پو€§م€‚ è؟™وک¯هگˆçگ†çڑ„,ه› ن¸؛è؟™ن؛›è؟‡و»¤ه™¨و—¨هœ¨ن¸ژ车辆وژ¥هڈ£ن¸€èµ·ه¤„çگ†وœ€ه¤ڑè¾¾هˆ° 100 Hz çڑ„و•°وچ®م€‚ ه¦‚وœéœ€è¦پè؟™ن؛›è؟‡و»¤ه™¨ن»¥و›´é«کçڑ„é€ںçژ‡ه¤„çگ†و•°وچ®ï¼Œهˆ™ه؛”ç›´وژ¥ن½؟用هگç±»وˆ–ه؛”ه®و–½و—¨هœ¨وڈگé«کé€ںه؛¦çڑ„ن¸“用è؟‡و»¤ه™¨م€‚
è؟‡و»¤ه™¨وژ¥هڈ—ن¸€ن¸ھ Clock و¨،و؟هڈ‚و•°م€‚ è؟™و ·هپڑçڑ„ç›®çڑ„وœ‰ن¸¤ن¸ھï¼ڑ
- و— 需é‡چو„هچ³هڈ¯وڈگن¾›ه¯¹هگ„ç§چو—¶é’ںçڑ„و”¯وŒپ(هچ³ç¨³ه®ڑن¸ژوŒ‚é’ں)
- ç،®ن؟هں؛ن؛ژ time_point çڑ„ API ن¸چن¸ژهں؛ن؛ژوŒپç»و—¶é—´çڑ„ API و··هگˆ
وڈگن¾›ن؛†هں؛ن؛ژوŒپç»و—¶é—´çڑ„ API ه’Œهں؛ن؛ژ time_point çڑ„ API(ه½¼و¤ن¸“وœ‰ï¼‰ï¼Œن»¥و”¯وŒپ用وˆ·هڈ¯èƒ½و‹¥وœ‰çڑ„ن¸چهگŒç”¨ن¾‹م€‚
هپ‡è®¾/ه·²çں¥é™گهˆ¶
و¤ API ه½“ه‰چهپ‡ه®ڑن¸€ç»´è¾“ه‡؛ه’Œن¸€ç»´è¾“ه…¥م€‚
ه¦‚وœéœ€è¦په¤ڑ维输ه…¥وˆ–输ه‡؛,هˆ™ه؛”وڈگن¾›ن¸چهگŒçڑ„ API,وˆ–者ه؛”و‰©ه±•وڈگن¾›çڑ„ APIم€‚
هپ‡ه®ڑو¤وژ¥هڈ£çڑ„ه®çژ°وک¯وœ‰çٹ¶و€پçڑ„ه’Œç¦»و•£و—¶é—´çڑ„م€‚
输ه…¥/输ه‡؛/API
API هڈ¯ن»¥هœ¨ API و–‡و،£ ن¸çœ‹هˆ°م€‚
ه†…部ه·¥ن½œ/ç®—و³•
ç›®ه‰چ,è؟™ن¸ھهŒ…هڈھهŒ…هگ«ن¸€ن¸ھو²،وœ‰é€»è¾‘çڑ„وژ¥هڈ£ه®ڑن¹‰م€‚
错误و£€وµ‹ه’Œه¤„çگ†
هں؛ç±»ç،®ن؟ن»¥ن¸‹ن¸چهڈکé‡ڈوˆگç«‹ï¼ڑ
- 输ه…¥و•°وچ®ن¸چوک¯ NAN وˆ– INF
- و—¶é—´و¥é•؟ن¸؛و£
ن½؟用 SFINAE هڈ¯éک²و¢ç”¨وˆ·و··هگˆ API 调用,هڈ¯èƒ½ه¯¼è‡´è؟‡و»¤ه™¨ه¤„ن؛ژن¸چن¸€è‡´çٹ¶و€پم€‚
è؟کè¦پو³¨و„ڈç،®ن؟ن»…هœ¨ه¼‚ه¸¸é€»è¾‘ن¹‹هگژو‰چه¯¹ç¨‹ه؛ڈçٹ¶و€پè؟›è،Œن؟®و”¹ï¼Œن»¥وڈگن¾›ه¼؛ه¤§çڑ„ه¼‚ه¸¸ن؟è¯پم€‚
ه®‰ه…¨و³¨و„ڈن؛‹é،¹
ه®‰ه…¨ن¸“ه®¶ه¾…ه®ڑ
هڈ‚考/ه¤–部链وژ¥
çژ°ن»£è؟‡و»¤ه™¨ هŒ…و‹¬ï¼ڑ
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
相ه…³é—®é¢ک
çٹ¶و€په’Œهڈکé‡ڈ
ç›®çڑ„/用ن¾‹
هٹ¨وœ؛
ن»»ن½•ه½¢ه¼ڈçڑ„çٹ¶و€پن¼°è®،都需è¦پن¸€ç§چè،¨ç¤؛çٹ¶و€پçڑ„ه½¢ه¼ڈم€‚ ن¸€ن¸ھه¸¸è§پçڑ„选و‹©وک¯ن»¥وںگç§چو•°ç»„çڑ„ه½¢ه¼ڈè،¨ç¤؛çٹ¶و€پم€‚ ن¾‹ه¦‚,由هڈکé‡ڈ X م€پ Y م€پ组وˆگçڑ„çٹ¶و€په°†ç”± Z ه¤§ه°ڈن¸؛ 3 çڑ„çٹ¶و€پهگ‘é‡ڈè،¨ç¤؛م€‚è؟™وک¯ن¸€ن¸ھوœ‰ç”¨çڑ„视ه›¾ï¼Œن½†ç¼؛ن¹ڈè،¨è¾¾èƒ½هٹ›ï¼Œه¹¶ن¸”هœ¨è®؟é—®هڈکé‡ڈو—¶ن¼ڑه¯¼è‡´ن»£ç په‡؛çژ°é—®é¢کم€‚ و¤ه¤–,è؟™ç§چè،¨ç¤؛è؟‡ن؛ژé€ڑ用,ه› ن¸؛و— و³•هŒ؛هˆ†è،¨ç¤؛ X م€پ Y م€پ Z ه’Œن¾‹ه¦‚ roll م€پ pitch çڑ„çٹ¶و€پهگ‘é‡ڈ yaw - ن¸¤è€…都ه°†ه®çژ°ن¸؛ه¤§ه°ڈن¸؛ 3 çڑ„هگ‘é‡ڈم€‚
وڈگè®®çڑ„设è®،
هœ¨è؟™ن¸ھهŒ…ن¸ï¼Œçٹ¶و€پوک¯é€ڑè؟‡ه…·ن½“ç±»ه‹çڑ„هڈکé‡ڈو¥è،¨ç¤؛çڑ„م€‚ هں؛وœ¬ن¸ٹ,ن»»ن½•ن»ژ简هچ•و ‡ç¾ç»“و„继و‰؟çڑ„ن¸œè¥؟ autoware::common::state_vector::Variable 都وک¯ن¸€ن¸ھهڈکé‡ڈم€‚ وœ‰ن¸€ن¸ھن¼´éڑڈçڑ„特ه¾پهڈ¯ن»¥è¯پوکژè؟™ن¸€ç‚¹م€‚ 然هگژهڈ¯ن»¥ه°†هڈکé‡ڈç±»ه‹ن½œن¸؛و¨،و؟هڈ‚و•°وڈگن¾›ç»™çٹ¶و€پç±»ه‹م€‚
è؟™ه…پ许然هگژن½؟用 autoware::common::state_vector::CommonState ç±»ه‹و¥ه®ن¾‹هŒ–è؟™ن¸ھه…·ن½“ç±»ه‹هŒ–çڑ„çٹ¶و€پم€‚ çژ°هœ¨ن»£è،¨ن¸چهگŒهڈکé‡ڈçڑ„çٹ¶و€په®é™…ن¸ٹه°†ه…·وœ‰ن¸چهگŒçڑ„ç±»ه‹م€‚ هœ¨ه¹•هگژ,è؟™ç§چçٹ¶و€پçڑ„ن¸€ن¸ھه®ن¾‹ن»چه°†و‹¥وœ‰ن¸€ن¸ھ适ه½“ه¤§ه°ڈçڑ„هگ‘é‡ڈو¥هکه‚¨ه…¶ه€¼م€‚ 然هگژهڈ¯ن»¥é€ڑè؟‡ç´¢ه¼•وˆ–هڈکé‡ڈوں¥è¯¢è؟™ن؛›ه€¼م€‚ ه½“ه‰چه®çژ°è؟کوڈگن¾›ن؛†و–‡ن»¶ن¸ه¸¸ç”¨çڑ„هڈکé‡ڈ common_variables.hpp ه’Œو–‡ن»¶ن¸ه¸¸ç”¨çڑ„çٹ¶و€پ common_states.hpp م€‚
ç¤؛ن¾‹ç”¨و³•
结و„ X : هڈکé‡ڈ{}; 结و„ X_VELOCITY : هڈکé‡ڈ{}; 结و„ Y : هڈکé‡ڈ{}; 结و„ Y_VELOCITY : هڈکé‡ڈ{}; 结و„ هپڈèˆھï¼ڑ角ه؛¦هڈکé‡ڈ{}ï¼› ن½؟用 çٹ¶و€پ = FloatState<X, X_VELOCITY, Y, Y_VELOCITY, YAW>; çٹ¶و€پ çٹ¶و€پ{}; state.at<X_VELOCITY>() = 1.0F; state.at<Y_VELOCITY>() = 1.0F;
هڈ‚考
#865 - é‡چو–°è®¾è®،هچ،ه°”و›¼و»¤و³¢ه™¨ç±»ه±‚و¬،结و„
çٹ¶و€پè؟‡و»¤ï¼ˆçٹ¶و€پن¼°è®،) ç›®çڑ„/用ن¾‹
ن¸؛ن؛†ه¹³و»‘ن¼ ه…¥çڑ„وµ‹é‡ڈ,é€ڑه¸¸ن½؟用و¦‚çژ‡و»¤و³¢ه™¨م€‚ è؟™ن؛›وœ‰ن¸چهگŒçڑ„ه‘³éپ“م€‚ ن»…ن¸¾ه‡ ن¸ھه¸¸è§پçڑ„选é،¹ï¼Œوœ‰ï¼ˆو‰©ه±•ï¼‰هچ،ه°”و›¼و»¤و³¢ه™¨م€پو— ه‘³هچ،ه°”و›¼و»¤و³¢ه™¨وˆ–ç²’هگو»¤و³¢ه™¨م€‚ è؟™ن؛›ن¸çڑ„و¯ڈن¸€ن¸ھ都وœ‰ه…¶ن¼ک点ه’Œç¼؛点م€‚ هœ¨è؟™ن¸ھهŒ…ن¸ï¼Œوˆ‘ن»¬ه®çژ°ن؛†ن¸€ن¸ھé€ڑ用çڑ„è؟‡و»¤ه™¨وژ¥هڈ£ï¼ˆ autoware::common::state_estimation::StateEstimationInterface )ه’Œن¸€ن؛›ه…·ن½“çڑ„ه®çژ°م€‚
ه½“ه‰چه®çژ°çڑ„è؟‡و»¤ه™¨وœ‰ï¼ڑ
设è®،
设è®،çڑ„هں؛çں³وک¯ autoware::common::state_estimation::StateEstimationInterface ,ه®ƒه®ڑن¹‰ن؛†è؟™ن¸ھè؟‡و»¤ه™¨çڑ„ه…·ن½“ه®çژ°هڈ¯ن»¥ه®çژ°çڑ„许ه¤ڑهٹں能م€‚ 该وژ¥هڈ£وک¯و¨،و؟هŒ–çڑ„,ه› و¤éپµه¾ھه¥‡و€ھé‡چه¤چو¨،و؟و¨،ه¼ڈ (CRTP) و¨،ه¼ڈ,ن»¥ه…پ许ن½؟用ه…·ن½“ç±»ه‹ه¹¶éپ؟ه…چ需è¦پوŒ‡é’ˆن»¥ن½؟è؟‡و»¤ه™¨ه®çژ°ه…·وœ‰ه¤ڑو€پو€§م€‚
ن»ژوœ¬è´¨ن¸ٹ讲,ه®çژ°و‰€وڈگè®®وژ¥هڈ£çڑ„و¯ڈن¸ھè؟‡و»¤ه™¨éƒ½ه°†ه…·وœ‰è®¸ه¤ڑهٹں能ï¼ڑ
è‡ھهٹ¨é¢„وµ‹ï¼ˆconst std::chrono::nanoseconds & dt);
و¨،و؟<ç±»ه‹هگچوµ‹é‡ڈT>
è‡ھهٹ¨و›´و£ï¼ˆه¸¸é‡ڈMeasurementTه’Œوµ‹é‡ڈ);
و¨،و؟<ç±»ه‹هگچStateT >
و— و•ˆé‡چ置(ه¸¸é‡ڈStateT ه’Œçٹ¶و€پ,ه¸¸é‡ڈç±»ه‹هگچ StateT ::Matrix ه’Œهچڈو–¹ه·®ï¼‰ï¼›
è‡ھهٹ¨ه’Œçٹ¶و€پ();
const auto & state() const ;
è‡ھهٹ¨ه’Œهچڈو–¹ه·®ï¼ˆï¼‰ï¼›
const auto & covariance() const ; |
ه› ن¸؛该وژ¥هڈ£éپµه¾ھ CRTP 范ه¼ڈ,و‰€ن»¥ه®çژ°è¯¥وژ¥هڈ£çڑ„ç±»ن¸چن¼ڑç›´وژ¥ه®çژ°ç±»ن¼¼ correct ه’Œçڑ„ه‡½و•° predict ,而وک¯ه®çژ° crtp_ ç”±وژ¥هڈ£è°ƒç”¨çڑ„ه†…部ه‡½و•°ï¼ˆè؟™é‡Œوک¯ه¸¦ه‰چç¼€çڑ„)م€‚
è؟™é‡Œوœںوœ› MeasurementT ç±»ه®çژ° autoware::common::state_estimation::MeasurementInterface 类,而 StateT ç±»وک¯ autoware::common::state_estimation::GenericState ç±»çڑ„特هŒ–م€‚ (و‰©ه±•ï¼‰هچ،ه°”و›¼و»¤و³¢ه™¨è®¾è®،
autoware::common::state_estimation::KalmanFilter ن¸ه£°وکژ çڑ„ç±» kalman_filter.hpp ه®çژ°ن؛† autoware::common::state_estimation::StateEstimationInterface .
ن¸؛ن؛†هˆ›ه»؛هچ،ه°”و›¼و»¤و³¢ه™¨ç±»çڑ„ه®ن¾‹ï¼Œç”¨وˆ·ه؟…é،»وڈگن¾› autoware::common::state_estimation::MotionModelInterface ه’Œ autoware::common::state_estimation::NoiseInterface ç±»çڑ„ه®ن¾‹م€‚ 然هگژه°†è؟™ن؛›ç”¨ن؛ژه®çژ° crtp_predict ه’Œ crtp_correct هٹں能م€‚
è¦ه‘ٹ هœ¨ issue #944 ه…³é—ن¹‹ه‰چ,角ه؛¦ن¸چن¼ڑ被هŒ…裹هœ¨çٹ¶و€پن¸م€‚
و‰©ه±•هچ،ه°”و›¼و»¤و³¢ç®—و³•
ه½¢ه¼ڈن¸ٹ,و¤هŒ…ن¸çڑ„هچ،ه°”و›¼و»¤و³¢ه™¨ه®çژ°ن½؟用ن»¥ن¸‹ç®—و³•م€‚ 让 x è،¨ç¤؛وںگن¸ھه¯¹è±،çڑ„ه½“ه‰چçٹ¶و€پم€‚ 除و¤ن¹‹ه¤–,çں©éکµ S وک¯وµ‹é‡ڈ该çٹ¶و€پن¸چç،®ه®ڑو€§çڑ„هچڈو–¹ه·®çں©éکµم€‚ و¤ه¤–,ن»¤ f ن¸؛éç؛؟و€§è½¬ç§»ه‡½و•°ï¼Œه…¶é›…هڈ¯و¯”ن¸؛ F ,ن¸چç،®ه®ڑو€§ç”±çں©éکµ Q وµ‹é‡ڈم€‚ ç±»ن¼¼çڑ„逻辑适用 ن؛ژن»¥و½œهœ¨éç؛؟و€§و–¹ه¼ڈ 观ه¯ںçٹ¶و€پ xçڑ„وµ‹é‡ڈه‡½و•° h م€‚ وچ¢هڈ¥è¯è¯´ï¼Œè؟™ن¸ھه‡½و•°ç»™ه®ڑن¸€ن¸ھوœھçں¥çٹ¶و€پ \hat{x} ن»ژè؟™ن¸ھçٹ¶و€پن؛§ç”ںن¸€ن¸ھوµ‹é‡ڈه€¼م€‚ è؟™ن¸ھه‡½و•°هگŒو ·وœ‰ن¸€ن¸ھé›…هڈ¯و¯”è،Œهˆ—ه¼ڈ,è؟™é‡Œç”¨ Hè،¨ç¤؛ .
هچ،ه°”و›¼و»¤و³¢ه™¨è؟ن»£هœ°é‡چه¤چن»¥ن¸‹و¥éھ¤ï¼ڑ
- هڈٹو—¶é¢„وµ‹ه½“ه‰چçٹ¶و€پهڈٹه…¶هچڈو–¹ه·®
- ç»™ه®ڑه¯¹çژ¯ه¢ƒçڑ„هکˆو‚观ه¯ں,ه®ƒن¼°è®،ه®ƒçڑ„预وµ‹ه؟…é،»ç؛ و£ه¤ڑه°‘
- è®،ç®—و ،و£çٹ¶و€په’Œهچڈو–¹ه·®
و›´و£ه¼ڈهœ°è¯´ï¼Œهگ‘é‡ڈ m è،¨ç¤؛çœںه®ن¸–ç•Œçڑ„观ه¯ں, R è،¨ç¤؛ه…¶هچڈو–¹ه·®ï¼ڑ
\begin{ه¯¹é½گ} x_\mathrm{预وµ‹} &= f(x) \\ S_\mathrm{预وµ‹} &= FSF^\top + Q \\ \\ i &= m - h(x_\mathrm{预وµ‹} ) \\ S_i &= H S_\mathrm{预وµ‹} H^\top + R \\ K &= S_\mathrm{预وµ‹} H^\top S_i^{-1} \\ \\ x_\mathrm{ن؟®و£} &= x_\mathrm{预وµ‹} + K i \\ S_\mathrm{و ،و£} &= (I - KH) S_\mathrm{预وµ‹}, \\ \end{ه¯¹é½گ}
هœ¨è؟™é‡Œï¼Œ I وک¯هچ•ن½چçں©éکµï¼Œ i وک¯â€œهˆ›و–°â€ï¼ˆç›´è§‚هœ°è¯´ï¼ڑ预وµ‹وµ‹é‡ڈن¸ژ观ه¯ںهˆ°çڑ„وµ‹é‡ڈ相ه·®ه¤ڑè؟œï¼‰ï¼Œ S_i وک¯هˆ›و–°هچڈو–¹ه·®م€‚ ه¸®هٹ©â€œه†³ه®ڑâ€ه¦‚ن½•و ،و£çٹ¶و€په¹¶ç›´è§‚هœ°â€œهٹ وƒâ€ه½“ه‰چçٹ¶و€پ预وµ‹çڑ„ç،®ه®ڑو€§ن¸ژوµ‹é‡ڈç،®ه®ڑو€§çڑ„و ¸ه؟ƒç»„ن»¶وک¯â€œهچ،ه°”و›¼ه¢ç›ٹâ€ï¼Œهœ¨و¤è،¨ç¤؛ ن¸؛ Kم€‚
错误و£€وµ‹ه’Œه¤„çگ†
该وژ¥هڈ£وک¯é™و€پçڑ„,ه› و¤هڈ¯ن»¥هœ¨ç¼–译و—¶وچ•èژ·ه¤§ه¤ڑو•°é”™è¯¯م€‚ Sensible static_assert هˆ†و•£هœ¨و•´ن¸ھن»£ç پن¸ï¼Œن»¥ن¾؟هڈٹو—©وچ•èژ·ç¼–程错误ه¹¶وڈگن¾›وœ‰و„ڈن¹‰çڑ„编译错误م€‚
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
ه®ƒ autoware::common::state_estimation::StateEstimationInterface 足ه¤ںé€ڑ用,هڈ¯ن»¥ه®çژ°ن¸چهگŒ ç±»ه‹ çڑ„è؟‡و»¤ه™¨م€‚ وƒ³هˆ°çڑ„وœ‰ï¼ڑ
- و— ه‘³هچ،ه°”و›¼و»¤و³¢ه™¨
- ه¹³و–¹و ¹هچڈو–¹ه·®و»¤و³¢ه™¨
ه¦‚وœéœ€è¦پ,è®،هˆ’هœ¨وœھو¥è؟›è،Œم€‚
相ه…³é—®é¢کï¼ڑ
- #865 : é‡چو–°è®¾è®،هچ،ه°”و›¼و»¤و³¢ه™¨ç±»ه±‚و¬،结و„
çٹ¶و€پن¼°è®،èٹ‚点
ç›®çڑ„/用ن¾‹
وˆ‘ن»¬éœ€è¦پن¸€ن¸ھ用ن؛ژ Autoware Auto ن¸çٹ¶و€پن¼°è®،çڑ„èٹ‚点م€‚ 该èٹ‚点ن½؟用 kalman_filter هŒ…ن½œن¸؛ن¸»ه¹²م€‚
هپ‡è®¾
çژ°هœ¨وˆ‘ن»¬هپ‡è®¾è·ںè¸ھهڈ‘ç”ںهœ¨ 2D ن¸ه¹¶ن¸”ن½؟用وپ’ه®ڑهٹ é€ںه؛¦è؟گهٹ¨و¨،ه‹م€‚
请و³¨و„ڈ,ن¼ ه‡؛و¶ˆوپ¯ه°†هœ¨ن¸ژن¼ ه…¥و¶ˆوپ¯ç›¸هگŒçڑ„و—¶é—´هڈ‚考ه¸§ن¸هٹ ن¸ٹو—¶é—´وˆ³ï¼Œه¹¶ن¸”وˆ‘ن»¬هپ‡è®¾و‰€وœ‰ن¸؛ن¼ ه…¥و¶ˆوپ¯هٹ ن¸ٹو—¶é—´وˆ³çڑ„و—¶é’ں都ه·²و£ç،®هگŒو¥م€‚ و¤ه¤–,هچ،ه°”و›¼و»¤و³¢ه™¨é¢„وµ‹ه°†هڈ‘ç”ںهœ¨ç”±ç¬¬ن¸€ن¸ھوژ¥و”¶çٹ¶و€په’Œé¢„وµ‹ن¹‹é—´çڑ„预وœںé—´éڑ”هˆه§‹هŒ–çڑ„稳ه®ڑو—¶é—´ç½‘و ¼ن¸ٹم€‚
输ه…¥è¾“ه‡؛
输ه…¥وک¯و›´و–°هں؛ç،€و»¤و³¢ه™¨ن¼°è®،预وµ‹çڑ„وµ‹é‡ڈه€¼م€‚ ç›®ه‰چ,该èٹ‚点و”¯وŒپن»¥ن¸‹è¾“ه…¥ï¼ڑ
- geometry_msgs/msg/PoseWithCovariance - وڈگن¾›ن½چç½®ه’Œو–¹هگ‘
- autoware_auto_geometry_msgs::msg::RelativePositionWithCovarianceStamped - وڈگن¾›ن½چç½®
- geometry_msgs/msg/TwistWithCovariance - وڈگن¾›é€ںه؛¦وµ‹é‡ڈ
- nav_msgs/msg/Odometry - وڈگن¾›ن½چç½®ه’Œé€ںه؛¦وµ‹é‡ڈ
è¦ه‘ٹ frame_id و‰€وœ‰ن¼ ه…¥و¶ˆوپ¯ çڑ„s ه؟…é،»ن¸ژ frame_id ن½œن¸؛هڈ‚و•°وڈگن¾›ç»™è¯¥èٹ‚点çڑ„هŒ¹é…چم€‚ هڈ‘ه¸ƒèٹ‚点çڑ„ن»»هٹ،وک¯هœ¨و£ç،®çڑ„ه¸§ن¸وڈگن¾›و•°وچ®م€‚ هپ‡è®¾و‰€وœ‰و¶ˆوپ¯éƒ½وµ‹é‡ڈهگŒن¸€ه¸§çڑ„çٹ¶و€پ,هچ³ child_frame_id و‰€وœ‰ن¼ ه…¥و¶ˆوپ¯çڑ„ a 都وک¯ç›¸هگŒçڑ„م€‚ ه¯¹ن؛ژو²،وœ‰ child_frame_id ه—و®µçڑ„و¶ˆوپ¯ï¼Œç”¨وˆ·وœ‰è´£ن»»ه¼؛هˆ¶è؟™ن؛›و¶ˆوپ¯ن¸ژه…¶ن»–و¶ˆوپ¯ن¸€و ·وµ‹é‡ڈهگŒن¸€ه¸§çڑ„çٹ¶و€پم€‚
该èٹ‚点هڈ¯ن»¥وœ‰ه¤ڑن¸ھن¸»é¢ک,è؟™ن؛›ن¸»é¢که؟…é،»é€ڑè؟‡هڈ‚و•°è؟›è،Œé…چç½®م€‚
çٹ¶و€پن¼°è®،ه™¨وڈگن¾›ن»¥ن¸‹è¾“ه‡؛ï¼ڑ
- è؟‡و»¤çڑ„ن½چç½®م€پو–¹هگ‘ه’Œç؛؟و€§ه’Œè§’é€ںه؛¦ï¼Œه¦‚ 用وˆ·هڈ¯ن»¥é‡چو–°وک ه°„ nav_msgs/msg/Odometry çڑ„ن¸»é¢کم€‚ filtered_state
笔记 وˆ‘ن»¬هœ¨è؟™é‡Œهڈھه…³و³¨ه¸¦و—¶é—´وˆ³çڑ„و¶ˆوپ¯م€‚
ه®و–½ç»†èٹ‚
该èٹ‚点çڑ„و ¸ه؟ƒهٹں能ن½چن؛ژ KalmanFilterWrapper ç±»ن¸م€‚ è¦پهˆه§‹هŒ–è؟™ن¸ھ类,وˆ‘ن»¬éœ€è¦پن»¥ن¸‹ه†…ه®¹ï¼ڑ
- ن¸€ن¸ھو£و–¹ه½¢ï¼ˆé€ڑه¸¸وک¯ه¯¹è§’ç؛؟)çں©éکµï¼Œه…¶ن¸هŒ…هگ«وˆ‘ن»¬çڑ„çٹ¶و€پهڈکé‡ڈçڑ„و–¹ه·®
- è؟‡ç¨‹ه™ھه£°çڑ„çں©ه½¢çں©éکµم€‚ ن¾‹ه¦‚,ه¯¹ن؛ژن¸€ç»´وƒ…ه†µï¼Œه®ƒهڈ¯ن»¥وک¯ [0, 0, 1],è؟™و„ڈه‘³ç€هٹ é€ںه؛¦ن¸ٹهڈھوœ‰ه™ھه£°م€‚
- è؟‡و»¤ه™¨و›´و–°ن¹‹é—´çڑ„预وœںو—¶é—´م€‚ ه¦‚وœن½؟用هں؛ن؛ژè®،و—¶ه™¨çڑ„و–¹و³•ï¼Œè؟™ç”¨ن؛ژهˆه§‹هŒ–وˆ‘ن»¬وœںوœ›èٹ‚点هڈ‘ه¸ƒé¢„وµ‹çڑ„و—¶é—´ç½‘و ¼م€‚
- و‹’ç»ه¼‚ه¸¸ه€¼وµ‹é‡ڈçڑ„马و°ڈè·ç¦»
- وˆ‘ن»¬هœ¨ EKF ه†…部ن½؟用çڑ„è؟گهٹ¨و¨،ه‹م€‚
è؟™ن¸ھç±»وڈگن¾›ن؛†ن¸€ن¸ھé«کç؛§وژ¥هڈ£و¥هœ¨ه؛•ه±‚ن½؟用هڈ¯èƒ½ن¸چهگŒçڑ„هچ،ه°”و›¼و»¤و³¢ه™¨ه®çژ°ï¼Œé€ڑè؟‡è؟™ن¸ھç±»çڑ„و¨،و؟هڈ‚و•°é…چç½®ه®ƒن»¬م€‚ ه®ƒو”¯وŒپهچ،ه°”و›¼و»¤و³¢ه™¨çڑ„و‰€وœ‰ç»ڈه…¸و“چن½œï¼Œن¾‹ه¦‚预وµ‹م€پو›´و–°ï¼ˆهœ¨è؟™ç§چوƒ…ه†µن¸‹و¥è‡ھ ROS و¶ˆوپ¯ï¼‰ن»¥هڈٹه°†çٹ¶و€پهڈٹه…¶هچڈو–¹ه·®ن½œن¸؛ ROS و¶ˆوپ¯èژ·هڈ–م€‚
笔记 è؟‡و»¤ه™¨هœ¨çœ‹هˆ°وœ‰çٹ¶و€پ观ه¯ںن¹‹ه‰چن¸چن¼ڑ预وµ‹çٹ¶و€پم€‚ ن¹‹هگژ,ه®ƒوŒ‰é¢„وœںه·¥ن½œم€‚
ه¤„çگ†و— ه؛ڈوµ‹é‡ڈçڑ„هژ†هڈ²
و‰€وœ‰â€œن؛‹ن»¶â€ï¼ˆن¾‹ه¦‚é‡چç½®م€پوµ‹é‡ڈو›´و–°م€پ预وµ‹ï¼‰éƒ½هکه‚¨هœ¨ن؛‹ن»¶هژ†هڈ²ن¸م€‚ ه®ƒوŒ‰و—¶é—´ç»„织ن¸؛éکںهˆ—م€‚ و¯ڈه½“ن¸€ن¸ھو–°ن؛‹ن»¶هˆ°è¾¾و—¶ï¼Œه®ƒه°±ن¼ڑ被و”¾ه…¥éکںهˆ—ن¸ç”±ه…¶و—¶é—´وˆ³وŒ‡ç¤؛çڑ„ن½چ置,ه¹¶ن¸”çژ°هœ¨هœ¨éکںهˆ—ن¸è¾ƒو™ڑçڑ„ن؛‹ن»¶هœ¨ه½“ه‰چن؛‹ن»¶ن¹‹ن¸ٹ“é‡چو’â€ï¼Œن»ژ而و›´و–°éکںهˆ—ن¸çڑ„وœ€هگژن¼°è®،çٹ¶و€پم€‚ ن¾‹هگ
هپ‡è®¾وˆ‘ن»¬وœ‰وœ€ه¤ڑ 5 ن¸ھن؛‹ن»¶çڑ„هژ†هڈ²è®°ه½•م€‚ ن؛‹ن»¶هڈ¯ن»¥وک¯é‡چç½® ( R )م€پ预وµ‹ ( P ) ه’Œو›´و–° ( U )م€‚ ن؛‹ن»¶هکه‚¨هœ¨وŒ‰ه…¶و—¶é—´وˆ³وژ’ه؛ڈçڑ„هژ†هڈ²è®°ه½•ن¸ï¼Œه¹¶ن¸”ن¸؛و¯ڈن¸ھن؛‹ن»¶هˆ†é…چن¸€ن¸ھçٹ¶و€پهگ‘é‡ڈ,è،¨ç¤؛该و—¶é—´وˆ³ ( S0 - S8 ) ه¤„çڑ„çٹ¶و€پم€‚
هپ‡è®¾هژ†هڈ²ه½“ه‰چه¤„ن؛ژن»¥ن¸‹é…چç½®ن¸ï¼ڑ
و—¶é—´وˆ³ï¼ڑ0 2 4 6 8
ن؛‹ن»¶ï¼ڑ---R----P----U----P----P--->
çٹ¶و€پï¼ڑS0 S2 S4 S6 S8
然هگژ,هœ¨و—¶é—´ 5 ن¼ڑوœ‰ن¸€ن¸ھو–°çڑ„و›´و–°ï¼Œه¦‚ن¸‹و‰€ç¤؛ï¼ڑ
و—¶é—´وˆ³ï¼ڑ0 2 4 6 8
ن؛‹ن»¶ï¼ڑ---R----P----U----P----P---> ^ أ¼
هژ†هڈ²è®°ه½•هڈھ能ن؟هک 5 ن¸ھن؛‹ن»¶ï¼Œه› و¤ه؟…é،»هˆ 除وœ€و—§çڑ„ن؛‹ن»¶ه¹¶وڈ’ه…¥و–°çڑ„ن؛‹ن»¶م€‚ 考虑هˆ°و—¶é—´ 5 çڑ„و–°è§‚ه¯ں,ن»¥ن¸‹و‰€وœ‰ن؛‹ن»¶ه°†و›´و–°ه…¶ن¼´éڑڈçٹ¶و€پم€‚و›´و–°çڑ„çٹ¶و€پهœ¨ن¸‹ه›¾ن¸ç”¨ S6' ه’Œ S8' è،¨ç¤؛ï¼ڑ
و—¶é—´وˆ³ï¼ڑ2 4 5 6 8
ن؛‹ن»¶ï¼ڑ---P----U--U--P----P--->
çٹ¶و€پï¼ڑS2 S4 S5 S6' S8'
笔记
ن¸¥و ¼و¥è¯´ï¼Œ هں؛ن؛ژهژ†هڈ²çڑ„و›´و–°و„ڈه‘³ç€è؟‡و»¤ه™¨çڑ„输ه‡؛ ن¸چوک¯è؟ç»çڑ„م€‚ 然而,ن¸چè؟ç»و€§هڈ¯èƒ½ه°ڈهˆ°هڈ¯ن»¥ه؟½ç•¥ن¸چè®،م€‚ ه¦‚وœن؛‹ه®è¯پوکژه¹¶éه¦‚و¤ï¼Œوˆ‘ن»¬ه°†éœ€è¦پ选و‹©و›´ه¤چو‚çڑ„و–¹و³•و¥ه¤„çگ†و— ه؛ڈوµ‹é‡ڈم€‚
TVM ه®ç”¨ç¨‹ه؛ڈ
è؟™وک¯ tvm_utility هŒ…装çڑ„设è®،و–‡ن»¶م€‚ وœ‰ه…³ه¦‚ن½•ن¸؛ YOLOv2 Tiny و„ه»؛وµ‹è¯•çڑ„说وکژ,请هڈ‚éک… YOLOv2 Tiny Example Pipeline م€‚ وœ‰ه…³هکه‚¨وµ‹è¯•ه·¥ن»¶çڑ„ن½چç½®çڑ„ن؟،وپ¯ï¼Œè¯·هڈ‚éک… TVM Utility Artifacts م€‚
ç›®çڑ„/用ن¾‹
ن¸€ç»„ c++ ه®ç”¨ç¨‹ه؛ڈ,هڈ¯ه¸®هٹ©و„ه»؛هں؛ن؛ژ TVM çڑ„وœ؛ه™¨ه¦ن¹ وژ¨çگ†ç®،éپ“م€‚ 该ه؛“هŒ…هگ«ن¸€ن¸ھوœ‰هٹ©ن؛ژو„ه»؛ç®،éپ“çڑ„ç®،éپ“ç±»ه’Œè®¸ه¤ڑوœ؛ه™¨ه¦ن¹ ن¸ه¸¸è§پçڑ„ه®ç”¨هٹں能م€‚
设è®،
Pipeline Class وک¯ç¼–ه†™وژ¨çگ†ç®،éپ“çڑ„و ‡ه‡†هŒ–و–¹و³•م€‚ ç®،éپ“ç±»هŒ…هگ« 3 ن¸ھن¸چهگŒçڑ„éک¶و®µï¼ڑ预ه¤„çگ†ه™¨م€پوژ¨çگ†ه¼•و“ژه’Œهگژه¤„çگ†ه™¨م€‚ وڈگن¾›ن؛†وژ¨çگ†ه¼•و“ژéک¶و®µçڑ„ TVM ه®çژ°م€‚
输ه…¥/输ه‡؛/API
ه‰چه¤„çگ†ه™¨ه’Œهگژه¤„çگ†ه™¨éœ€è¦پ用وˆ·هœ¨ه®ن¾‹هŒ–وµپو°´ç؛؟ن¹‹ه‰چه®çژ°م€‚ و‚¨هڈ¯ن»¥هœ¨و¤example_pipeline ن¸وں¥çœ‹ç¤؛ن¾‹ç”¨و³• م€‚
ç®،éپ“ن¸çڑ„و¯ڈن¸ھéک¶و®µéƒ½وœ‰ن¸€ن¸ھ schedule ه‡½و•°ï¼Œè¯¥ه‡½و•°ه°†è¾“ه…¥و•°وچ®ن½œن¸؛هڈ‚و•°ه¹¶è؟”ه›è¾“ه‡؛و•°وچ®م€‚ ن¸€و—¦ç®،éپ“ه¯¹è±،被هˆ›ه»؛, pipeline.schedule ه°±ن¼ڑ被调用و¥è؟گè،Œç®،éپ“م€‚
è¯ é‡ٹ ن¸»è¦پ(){
create_subscription<sensor_msgs::msg::PointCloud2>( "points_raw" ,
rclcpp::QoS{1}, [ this ]( const sensor_msgs::msg::PointCloud2::SharedPtr msg)
{pipeline.schedule(msg);});
} |
输ه‡؛
- autoware_check_neural_network cmake ه®ڈو£€وں¥وک¯هگ¦هکهœ¨ç‰¹ه®ڑçڑ„网络ه’Œهگژ端组هگˆ
هگژ端
model_zoo.hpp ن¸؛ن؛†èژ·ه¾—ç›®و ‡و¨،ه‹/هگژ端组هگˆçڑ„ TVM é…چ置结و„, 预è®،ه°†هŒ…هگ«ç›¸ه…³هŒ…م€‚ 用ن؛ژè؟›è،Œوژ¨çگ†çڑ„هگژ端هڈ¯ن»¥é€ڑè؟‡è®¾ç½® NETWORKS_BACKEND ن¸؛编译ه®ڑن¹‰و¥وŒ‡ه®ڑم€‚ ه®ƒé»ک认ن¸؛ llvm .
错误و£€وµ‹ه’Œه¤„çگ†
std::runtime_error و¯ڈه½“éپ‡هˆ°é”™è¯¯و—¶éƒ½ه؛”该وٹ›ه‡؛م€‚ ه®ƒه؛”该ه،«ه……适ه½“çڑ„و–‡وœ¬é”™è¯¯وڈڈè؟°م€‚
ه®‰ه…¨و³¨و„ڈن؛‹é،¹
输ه…¥ه’Œè¾“ه‡؛都由هگŒن¸€ن¸ھهڈ‚ن¸ژ者وژ§هˆ¶ï¼Œه› و¤ن»¥ن¸‹ه®‰ه…¨é—®é¢ک超ه‡؛ن؛†èŒƒه›´ï¼ڑ
ه°†و•°وچ®و³„露给هڈ¦ن¸€ن¸ھهڈ‚ن¸ژ者需è¦پ TVM وˆ–ه…پ许读هڈ–ن»»و„ڈه†…هکçڑ„ن¸»وœ؛و“چن½œç³»ç»ںهکهœ¨ç¼؛陷,è؟™وœ¬è؛«ه°±وک¯ن¸€ن¸ھé‡چه¤§çڑ„ه®‰ه…¨ç¼؛é™·م€‚ ه¯¹ن؛ژو—©وœںو“چن½œç®،éپ“çڑ„ه¤–部هڈ‚ن¸ژ者ن¹ںوک¯ه¦‚و¤ï¼ڑهڈھوœ‰هگ¯هٹ¨ç®،éپ“çڑ„ه¯¹è±،و‰چ能è؟گè،Œو–¹و³•و¥وژ¥و”¶ه…¶è¾“ه‡؛م€‚
و‹’ç»وœچهٹ،و”»ه‡»هڈ¯èƒ½ن½؟ç›®و ‡ç،¬ن»¶و— و³•ç”¨ن؛ژه…¶ن»–ç®،éپ“,ن½†éœ€è¦پ能ه¤ںهœ¨ CPU ن¸ٹè؟گè،Œن»£ç پ,è؟™ه·²ç»ڈه…پ许و›´ن¸¥é‡چçڑ„و‹’ç»وœچهٹ،و”»ه‡»م€‚
و¤è½¯ن»¶هŒ…ن¸چ需è¦پوڈگهچ‡ç‰¹وƒم€‚
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
وœھو¥çڑ„软ن»¶هŒ…ه°†ن½؟用 tvm_utility ن½œن¸؛و„ںçں¥ه †و ˆçڑ„ن¸€éƒ¨هˆ†و¥è؟گè،Œوœ؛ه™¨ه¦ن¹ ه·¥ن½œè´ںè½½م€‚
相ه…³é—®é¢ک
https://gitlab.com/autowarefoundation/autoware.auto/AutowareAuto/-/issues/721
https://gitlab.com/autowarefoundation/autoware.auto/AutowareAuto/-/issues/677
vehicle_constants_manager
è؟™وک¯ vehicle_constants_manager هŒ…装çڑ„设è®،و–‡ن»¶م€‚
ç›®çڑ„/用ن¾‹
该ه؛“وڈگن¾›ن؛†ن¸€ن¸ھ用ن؛ژن؟هک车辆特ه®ڑه¸¸é‡ڈçڑ„结و„م€‚ ه®ƒè؟کوڈگن¾›ن؛†ن¸€ن¸ھه¸®هٹ©و–¹و³•و¥ه£°وکژه·²ç»ڈن¼ 递给èٹ‚点çڑ„车辆特ه®ڑه¸¸é‡ڈه¹¶وڈگن¾›ن¸€ن¸ھ VehicleConstants ه¯¹è±،م€‚
设è®،
وڈگن¾› VehicleConstants çڑ„结و„هŒ…هگ«è½¦è¾†هڈ‚و•°م€‚ ه®ƒçڑ„هڈ‚و•°هڈ¯ن»¥هˆ†ن¸؛ن¸¤ç±»ï¼ڑ(هڈکé‡ڈçڑ„详细وڈڈè؟°ه’Œهچ•ن½چهœ¨ vehicle_constants_manager.hpp و–‡ن»¶ن¸م€‚)
- ن¸»è¦په¸¸و•°
- è½®هچٹه¾„
- è½®ه®½
- è½®è·
- wheel_tread
- و‚¬ه‚ه‰چ端
- و‚¬ه‚هگژ部
- overhang_left
- و‚¬ه‚هڈ³ن¾§
- 车辆é«که؛¦
- cg_to_rear
- è½®èƒژ转ه¼¯هˆڑه؛¦
- è½®èƒژ转ه¼¯هˆڑه؛¦_هگژn_per_deg
- mass_vehicle
- وƒ¯و€§هپڈèˆھه…¬و–¤ç±³2
- و´¾ç”ںه¸¸و•°
- cg_to_front
- 车辆é•؟ه؛¦
- 车辆ه®½ه؛¦
- offset_longitudinal_min
- offset_longitudinal_max
- offset_lateral_min
- offset_lateral_max
- offset_height_min
- offset_height_max
و„é€ VehicleConstants ه‡½و•°ن½؟用ن¸»è¦پهڈ‚و•°è؟›è،Œهˆه§‹هŒ–م€‚
该ه؛“è؟کوڈگن¾›ن؛†ن¸€ç§چ declare_and_get_vehicle_constants و–¹و³•م€‚ ن½؟用该و–¹و³•ï¼Œç”¨وˆ·هڈ¯ن»¥ه£°وکژه·²ç»ڈن¼ ه…¥èٹ‚点çڑ„车辆هڈ‚و•°ه¹¶èژ·هڈ–ن¸€ن¸ھ VehicleConstants ه¯¹è±،م€‚
هپ‡è®¾/ه·²çں¥é™گهˆ¶
该ه؛“هپ‡ه®ڑ车辆وک¯ن½؟用 Ackermann 转هگ‘ه‡ ن½•ه®ڑن¹‰çڑ„م€‚
declare_and_get_vehicle_constants و–¹و³•è¦پو±‚ن¼ 递çڑ„èٹ‚点覆盖ن»¥ن¸‹هڈ‚و•°ï¼ڑ
(و³¨و„ڈ vehicle ه‘½هگچç©؛间)
车辆ï¼ڑ
è½®هگهچٹه¾„ï¼ڑ
è½®ه®½ï¼ڑ
è½®è·ï¼ڑ
è½®è·ï¼ڑ
و‚¬ه‚ه‰چ端ï¼ڑ
و‚¬ه‚هگژ部ï¼ڑ
و‚¬ه‚ه·¦ن¾§ï¼ڑ
و‚¬ه‚هڈ³ï¼ڑ
车辆é«که؛¦ï¼ڑ
cg_to_rearï¼ڑ
è½®èƒژ转ه¼¯هˆڑه؛¦_ه‰چn_و¯ڈه؛¦ï¼ڑ
è½®èƒژ转ه¼¯هˆڑه؛¦_هگژn_per_degï¼ڑ
mass_vehicle:
وƒ¯و€§هپڈèˆھه…¬و–¤ç±³2ï¼ڑ |
输ه…¥/输ه‡؛/API
çڑ„و„é€ ه‡½و•° VehicleConstants 采用ن¸»è¦پçڑ„车辆ه¸¸é‡ڈه¹¶ç”ںوˆگو´¾ç”ںهڈ‚و•°م€‚
declare_and_get_vehicle_constants و–¹و³•وژ¥هڈ—ن¸€ن¸ھ rclcpp::Node ه¯¹è±،م€‚ VehicleConstants ه¦‚وœوˆگهٹںهˆ™ è؟”ه›ن¸€ن¸ھه¯¹è±،م€‚
ç¤؛ن¾‹ç”¨و³•ï¼ڑ
// هœ¨ن¸€ن¸ھèٹ‚点çڑ„و„é€ ه‡½و•°ن¸ï¼Œه®ƒن»ژن¸€ن¸ھوژ¥و”¶هˆ°ن¸»è¦پ车辆هڈ‚و•°çڑ„èٹ‚点
// .yaml و–‡ن»¶وˆ–è؟گè،Œ argsم€‚
auto vehicle_constants = declare_and_get_vehicle_constants (* this ); |
ه†…部ه·¥ن½œ/ç®—و³•
و— و³•ن½؟用م€‚
错误و£€وµ‹ه’Œه¤„çگ†
该 VehicleConstants 结و„هœ¨و„é€ و—¶و‰§è،Œن¸€ن؛›ه®Œو•´و€§و£€وں¥م€‚
std::runtime_error ه¦‚وœوںگن؛›هڈ‚و•°ن¸؛è´ںو•°وˆ– cg_to_rear ه¤§ن؛ژ wheel_base (ن»¥ç،®ن؟é‡چه؟ƒهœ¨ه‰چهگژè½´ه†…) ,ه®ƒه°†وٹ›ه‡؛م€‚
ه®‰ه…¨و³¨و„ڈن؛‹é،¹
ه¾…ه®ڑم€‚
هڈ‚考/ه¤–部链وژ¥
و— و³•ن½؟用م€‚
وœھو¥çڑ„و‰©ه±•/وœھه®çژ°çڑ„部هˆ†
و— و³•ن½؟用م€‚
相ه…³é—®é¢ک
https://gitlab.com/autowarefoundation/autoware.auto/AutowareAuto/-/issues/1294
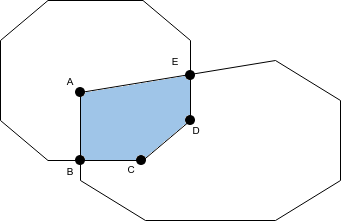
ن؛Œç»´ه‡¸ه¤ڑè¾¹ه½¢ç›¸ن؛¤
ن¸¤ن¸ھه‡¸ه¤ڑè¾¹ه½¢çڑ„ن؛¤ç‚¹هڈ¯ن»¥هœ¨ن¸‹ه›¾ن¸وک¾ç¤؛ن¸؛è“色هŒ؛هںںï¼ڑ
ç›®çڑ„/用ن¾‹
è®،ç®—ن¸¤ن¸ھه¤ڑè¾¹ه½¢ن¹‹é—´çڑ„ن؛¤é›†هœ¨هœ؛و™¯çگ†è§£çڑ„许ه¤ڑه؛”用ن¸ه¾ˆوœ‰ç”¨م€‚ ه®ƒهڈ¯ç”¨ن؛ژن¼°è®،碰و’و£€وµ‹م€په½¢çٹ¶ه¯¹é½گم€په½¢çٹ¶ه…³èپ”ن»¥هڈٹه¤„çگ†و„ںçں¥ن»£çگ†ه‘¨ه›´ه¯¹è±،çڑ„ن»»ن½•ه؛”用程ه؛ڈم€‚
设è®،
(Livermore, Calif, 1977) وڈگهˆ°ن»¥ن¸‹ه…³ن؛ژه‡¸ه¤ڑè¾¹ه½¢ç›¸ن؛¤çڑ„观ه¯ںï¼ڑ
- ن¸¤ن¸ھه‡¸ه¤ڑè¾¹ه½¢çڑ„ن؛¤ç‚¹وک¯ه‡¸ه¤ڑè¾¹ه½¢
- هŒ…هگ«هœ¨هڈ¦ن¸€ن¸ھه¤ڑè¾¹ه½¢ن¸çڑ„ه¤ڑè¾¹ه½¢çڑ„é،¶ç‚¹وک¯ç›¸ن؛¤ه½¢çٹ¶çڑ„é،¶ç‚¹م€‚ (ن¸ٹه›¾ن¸çڑ„é،¶ç‚¹ Aم€پCم€پD)
- هŒ…هگ«هœ¨هڈ¦ن¸€ن¸ھه¤ڑè¾¹ه½¢ن¸çڑ„ه¤ڑè¾¹ه½¢çڑ„è¾¹وک¯ç›¸ن؛¤ه½¢çٹ¶çڑ„è¾¹م€‚ (ن¸ٹه›¾ن¸çڑ„è¾¹ç¼کCD)
- ن¸¤ن¸ھه¤ڑè¾¹ه½¢ن¹‹é—´çڑ„边相ن؛¤وک¯ç›¸ن؛¤ه½¢çٹ¶ن¸çڑ„é،¶ç‚¹م€‚ (ن¸ٹه›¾ن¸çڑ„é،¶ç‚¹ Bم€پEم€‚)
ه†…部ه·¥ن½œ/ç®—و³•
é€ڑè؟‡ن¸ٹè؟°è§‚ه¯ں,ه½“ه‰چç®—و³•ن»¥ن»¥ن¸‹و–¹ه¼ڈè؟گè،Œï¼ڑ
- è®،ç®—ه¹¶و‰¾هˆ°هŒ…هگ«هœ¨هڈ¦ن¸€ن¸ھه¤ڑè¾¹ه½¢ن¸çڑ„و¯ڈن¸ھه¤ڑè¾¹ه½¢çڑ„é،¶ç‚¹ï¼ˆé،¶ç‚¹ Aم€پCم€پD)
- è®،ç®—ه¹¶و‰¾هˆ°و¯ڈن¸ھه¤ڑè¾¹ه½¢ن¹‹é—´çڑ„ن؛¤ç‚¹ï¼ˆVerties B, E)
- é€ڑè؟‡é€†و—¶é’ˆوژ’ه؛ڈو¥è®،ç®—ç”±è؟™ن؛›é،¶ç‚¹ه½¢وˆگçڑ„ه‡¸هŒ…م€‚
输ه…¥/输ه‡؛/API
输ه…¥ï¼ڑ
- هŒ…هگ«وŒ‰é€†و—¶é’ˆو–¹هگ‘وژ’ه؛ڈçڑ„ه‡¸ه¤ڑè¾¹ه½¢é،¶ç‚¹çڑ„ن¸¤ن¸ھهڈ¯è؟ن»£ه¯¹è±،م€‚
输ه‡؛ï¼ڑ
- ن»¥é€†و—¶é’ˆو–¹هگ‘وژ’ه؛ڈçڑ„ن؛¤é›†ه½¢çٹ¶çڑ„é،¶ç‚¹هˆ—è،¨م€‚
وœھو¥çڑ„ه·¥ن½œ
- #1230ï¼ڑه؛”用وœ‰و•ˆçڑ„ç®—و³•م€‚
相ه…³é—®é¢ک
- #983ï¼ڑهœ¨ه¯¹è±،è·ںè¸ھه™¨ن¸é›†وˆگ视觉و£€وµ‹
|








