|
1.ه®ڑو—¶ه™¨&蜂鸣ه™¨
ن¸€èˆ¬ه®ڑو—¶ه™¨ن¸و–ه‡½و•°é‡Œçڑ„ه†…ه®¹وœ€ه¥½وک¯èƒ½ه¤ںه؟«é€ںهœ°هژ»و‰§è،Œه®Œï¼Œو¯”ه¦‚هڈھو‰§è،Œه‡ و،简هچ•çڑ„è¯هڈ¥ï¼Œè؟™و ·ن¸ژن¸»ه‡½و•°é…چهگˆو‰چن¼ڑن½؟程ه؛ڈو›´هٹ é«کو•ˆم€‚ه‰چوœںو•™ه¦é‡Œï¼Œوˆ‘ن»¬هڈھن½؟用ه®ڑو—¶ه™¨ن¸و–è´ںè´£وںگن¸ھIOه¼•è„ڑé—´éڑ”è·³هڈکوˆ–者ن½؟ن¸€ن¸ھهڈکé‡ڈé—´éڑ”è‡ھهٹ 1çڑ„简هچ•è¯هڈ¥م€‚
و¯”ه¦‚وˆ‘ن»¬çژ°هœ¨è¦په®çژ°é—´éڑ”50msه·¦هڈ³çڑ„و—¶é—´è®©وµپو°´çپ¯ه·¦هڈ³ه¾ھçژ¯ç§»هٹ¨çڑ„هگŒو—¶ï¼Œè؟ک需è¦پو— و؛گ蜂鸣ه™¨ن¸€ç›´ه“چ,è؟™و ·çڑ„هٹں能,و€è·¯è¯¥و€ژن¹ˆهژ»و€è€ƒï¼ں
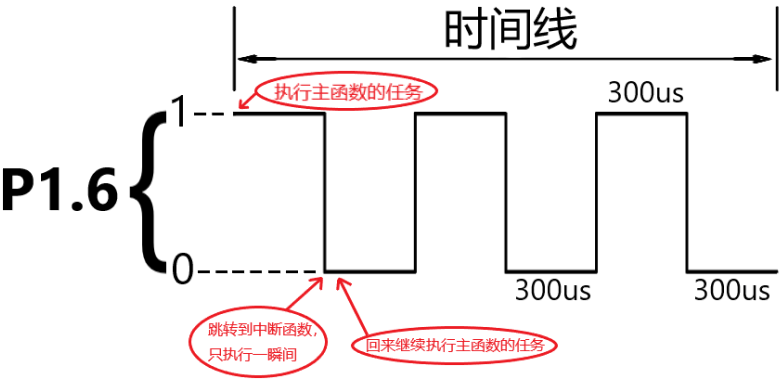
首ه…ˆوˆ‘ن»¬çں¥éپ“و— و؛گ蜂鸣ه™¨è¦پوƒ³é¸£هڈ«çڑ„و¯”较ه°–é”گ,那P1.6需è¦پن¸€ن¸ھهگˆé€‚çڑ„脉ه†²ن؟،هڈ·ï¼Œè؟™ن¸ھن؟،هڈ·ç¬”者و‰“ç®—ن½؟P1.6é«کن½ژ电ه¹³ن؟وŒپçڑ„و—¶é—´ن¸؛300ه¾®ç§’ن¸چو–ه¾ھçژ¯م€‚
و‰€ن»¥وˆ‘ن»¬ç”¨ه®ڑو—¶ه™¨ن¸و–ه®çژ°P1.6çڑ„电ه¹³é—´éڑ”è·³هڈک,ن¸»ه‡½و•°é‡Œè´ںè´£ه®Œوˆگوµپو°´çپ¯çڑ„ن»»هٹ،هچ³هڈ¯م€‚
2.ن»£ç پ
#include <reg52.h>
#include <function.h>//详è§پ第ه…ç« ç¬¬8讲
u8 T0RH, T0RL;
void TIM0_Init(u32 us,int trim)
{
u32 tmp;
tmp = 11059200 / 12;
tmp = ( tmp * (us/100) )/10000;
tmp = 65536 - tmp;
tmp = tmp+trim;
T0RH = (unsigned char)(tmp>>8);
T0RL = (unsigned char)tmp;
TMOD &= 0xF0;
TMOD |= 0x01;
TH0 = T0RH;
TL0 = T0RL;
ET0 = 1;
TR0 = 1;
}
void main()
{
u8 i,dir;
LED_Init();
EA = 1;
TIM0_Init(300,0);
while(1)
{
if(i<8)dir=0;
if(dir==0)P0=~(0x01<<i);
if(i>=8)dir=1;
if(dir==1)P0=~( 0x80>>(i-7) );
i++;
if(i>=15)i=1;
delay_ms(50);
}
}
void TIM0_IRQHandler() interrupt 1
{
TH0 = T0RH;
TL0 = T0RL;
BEEP=!BEEP;
}
|
هڈ¯ن»¥çœ‹هˆ°ن½؟用ه®ڑو—¶ه™¨ن¸و–و¯”ه¤–部ن¸و–触هڈ‘è؟کè¦پé«کو•ˆم€‚
3.讲解ه¾®è°ƒ
然هگژه›هˆ°ن¸ٹن¸€è®²è¯´è؟‡çڑ„و€ژن¹ˆوµ‹è¯•ç„¶هگژهژ»ه¾®è°ƒن½؟ه®ڑو—¶و—¶é—´و›´ç²¾ç،®م€‚
و‹؟وˆ‘ن»¬è؟™è®²çڑ„ن»£ç پو¥è¯´ï¼Œé¦–ه…ˆهœ¨ن¸چه¾®è°ƒçڑ„وƒ…ه†µن¸‹ï¼Œن¹ںه°±وک¯ن¼ ه…¥çڑ„هڈ‚و•°trimن¸؛0,看看ه®ڑو—¶çڑ„و—¶é—´وک¯ه¤ڑه°‘م€‚
è؟›ه…¥è½¯ن»¶è°ƒè¯•و¨،ه¼ڈ,هœ¨â€œBEEP=! BEEP;â€è®¾ç½®و–点,هœ¨و²،وœ‰ه¾®è°ƒن¹‹ه‰چ观ه¯ںو¯ڈو¬،و‰§è،Œâ€œBEEP
=! BEEP;â€çڑ„é—´éڑ”و—¶é—´م€‚

وŒ‰ن¸‹RSTه¤چن½چن¹‹هگژ,ه…ˆوŒ‰ن¸¤و¬،RUN

ه†چوŒ‰ن¸€و¬،RUN
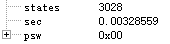
ه®ڑو—¶و—¶é—´ن¸؛0.003285-0.002979= 0.000306s
و‰€ن»¥ه®ڑو—¶و—¶é—´è¶…ن؛†6ه¾®ç§’,هˆ™éœ€è¦پç»™trimن¸€ن¸ھهگˆé€‚çڑ„هڈ‚و•°ï¼Œè؟™é‡Œç¬”者调ه‡؛ن؛†وœ€هگˆé€‚çڑ„و•°ن¸؛6,و‰€ن»¥وˆ‘ن»¬هˆه§‹هŒ–ه®ڑو—¶ه™¨و—¶و”¹ن¸؛
è؟™و ·و¯ڈو¬،跳转هˆ°ن¸و–ه‡½و•°هژ»و‰§è،Œçڑ„é—´éڑ”و—¶é—´ه°±ن¸؛ç²¾ç،®çڑ„300usن؛†م€‚
ه½“وˆ‘ن»¬è¦په®ڑو—¶هچپو¯«ç§’وˆ–者ن؛Œن¸‰هچپو¯«ç§’و—¶ï¼Œه¾®è°ƒçڑ„و•°هڈ¯èƒ½ه°±ن¸چوک¯6ن؛†ï¼Œè€Œوک¯20ن¹‹é—´وˆ–者ه…¶ن»–و•°ï¼Œو‰€ن»¥و¯ڈو¬،وƒ³è¦پç²¾ç،®ه®ڑو—¶ه°±éœ€è¦پ软ن»¶è°ƒè¯•ن؛²è‡ھوµ‹è¯•م€‚
|








