|
1.舵وœ؛ه‡†ه¤‡
舵وœ؛وک¯هچ•ç‰‡وœ؛وœ؛و¢°وژ§هˆ¶ه…¥é—¨ه؟…ه¦çڑ„و¨،ه—,هœ¨ن¸€ن؛›وœ؛ه™¨ن؛؛ه…³èٹ‚ن¸ن¹ںوک¯é‡‡ç”¨èˆµوœ؛ن½œن¸؛وژ§هˆ¶ï¼Œه¦ن¹ ه¹¶ç†ں练وژŒوڈ،ن½؟用舵وœ؛وک¯وˆ‘ن»¬ه¯¹هچ•ç‰‡وœ؛çڑ„è؟›ن¸€و¥è®¤è¯†م€‚
و‰€ن»¥وˆ‘ن»¬ن¸چ能ن¸€ç›´ه±€é™گهœ°ن½؟用ه¼€هڈ‘و؟è؟›è،Œه¦ن¹ ,而وک¯و‰©ه±•ن¸€ن؛›ç”µهگو¨،ه—و¥è¾…هٹ©وˆ‘ن»¬و›´هٹ و·±ه…¥ن؛†è§£هچ•ç‰‡وœ؛م€‚و‰€ن»¥ه¤§ه®¶éœ€è¦پè‡ھè،Œè´ن¹°èˆµوœ؛م€‚
ه°ڈه‹çڑ„舵وœ؛ن¸ژه¤§ه‹çڑ„舵وœ؛وژ§هˆ¶هژںçگ†ه‡ ن¹ژه¤§هگŒه°ڈه¼‚,考虑هˆ°ç»ڈوµژçڑ„هگˆçگ†ن½؟用,وˆ‘ن»¬é€‰و‹©ه°ڈه‹èˆµوœ؛ن½œن¸؛ه…¥é—¨ه¦ن¹ ه’Œç®€هچ•ن½؟用هچ³هڈ¯م€‚
ه¸¸è§پçڑ„ه°ڈه‹èˆµوœ؛ه‹هڈ·ن¸؛“9g舵وœ؛â€ï¼Œه¤–观ه¤§ن½“ه¦‚ن¸‹

ن¸چè؟‡ç¬”者觉ه¾—è؟™ç§چه‹هڈ·çڑ„舵وœ؛虽然ن¾؟ه®œن¸”ه¤§ه®¶éƒ½و™®éپچن½؟用,ن½†وک¯è؟™ç§چ舵وœ؛è؟œو²،وœ‰é‡‘ه±èˆµوœ؛ه¥½ç”¨ï¼Œو‰€ن»¥ç¬”者è؟کوک¯ه»؛è®®ه¤§ه®¶é€‰و‹©è´ن¹°ن¸ژن¸ٹه›¾ن½“ه‹ه·®ن¸چه¤ڑن½†ن»·و ¼ç¨چè´µن¸€ç‚¹çڑ„金ه±èˆµوœ؛ن¸؛ه¥½ï¼Œوœ¬و•™ç¨‹ن½؟用çڑ„舵وœ؛ه‹هڈ·ه¦‚ن¸‹ه›¾و‰€ç¤؛

2.舵وœ؛وژ§هˆ¶هژںçگ†
وœ¬و•™ç¨‹ن½؟用çڑ„舵وœ؛ن¸؛9gه°؛ه¯¸ï¼Œه‹هڈ·ن¸؛“MG90Sâ€ن½œن¸؛ç¤؛ن¾‹و¨،ه—م€‚
è؟™ç§چ舵وœ؛çڑ„ن½œç”¨è§’ه؛¦ن¸؛0~180ه؛¦ï¼Œن¹ںه°±وک¯èˆµوœ؛و،¨هڈ¯ن»¥ن»»و„ڈهœ¨وںگن¸ھ角ه؛¦هچ،و»ن¸چهٹ¨ï¼Œç”±ن؛ژن¾›ç”µهژںه› وˆ‘ن»¬ن½؟用蛮هٹ›وک¯ه¾ˆéڑ¾وژ°هٹ¨èˆµوœ؛و،¨çڑ„,هڈھوœ‰èˆµوœ؛وژ‰ç”µن¹‹هگژ舵وœ؛و،¨و‰چن¼ڑن»»و„ڈهœ°è®©وˆ‘ن»¬و‰هٹ¨م€‚
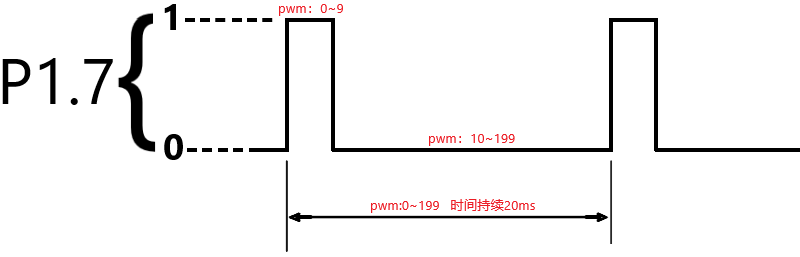
舵وœ؛وœ‰ن¸‰و ¹ç؛؟,除ن؛†ن¾›ç”µçڑ„ن¸¤و ¹ç”µو؛گç؛؟è؟کوœ‰ن¸€و ¹ن؟،هڈ·ç؛؟,ه› ن¸؛وˆ‘ن»¬ن½؟用çڑ„وک¯5V电هژ‹هٹںçژ‡çڑ„舵وœ؛,و‰€ن»¥ه…¶ç”µو؛گç؛؟هڈ¯ن»¥ç›´وژ¥وژ¥هˆ°هچ•ç‰‡وœ؛çڑ„+5Vه’ŒGNDن¸ٹ,ن؟،هڈ·ç؛؟çڑ„è¯ه°±وژ¥هˆ°هچ•ç‰‡وœ؛çڑ„ن¸€ن¸ھIO端هڈ£ن¸ٹ,è؟™ن¸ھIO端هڈ£é€ڑè؟‡è¾“ه‡؛PWMوژ§هˆ¶èˆµوœ؛و،¨çڑ„角ه؛¦هœ¨ن»»و„ڈن½چç½®ن¸ٹه›؛ه®ڑهپœç•™م€‚
è؟™ن¸ھPWMçڑ„ه‘¨وœںن¸؛20ms,é«ک电ه¹³çڑ„و—¶é—´هœ¨0.5ms~2.5msن¹‹é—´هڈ¯ن»¥وژ§هˆ¶èˆµوœ؛و،¨è§’ه؛¦çڑ„هپœç•™ن½چç½®م€‚
0.5ms---------0ه؛¦م€‚
1.0ms---------45ه؛¦م€‚
1.5ms---------90ه؛¦م€‚
2.0ms---------135ه؛¦م€‚
2.5ms---------180ه؛¦م€‚
وˆ‘ن»¬وٹٹ舵وœ؛çڑ„电و؛گç؛؟وژ¥ه¥½ï¼Œç„¶هگژن؟،هڈ·ç؛؟è؟وژ¥P1.7,وٹٹن»£ç پن¸‹è½½è؟›هژ»ï¼Œèˆµوœ؛و،¨هœ¨ن¸ٹ电ن¹‹هگژه°±ن¼ڑو—‹è½¬هˆ°ن¸€ن¸ھه›؛ه®ڑ角ه؛¦çڑ„ن½چç½®ن¸ٹهپœç•™هœ¨é‚£ن¸چهٹ¨ï¼Œوˆ‘ن»¬وƒ³و‰هٹ¨èˆµوœ؛و،¨وک¯و¯”较هگƒهٹ›çڑ„م€‚
3.ن»£ç پ
#include <reg52.h>
#include <function.h>//详è§پ第ه…ç« ç¬¬8讲
#include <timer.h> //详è§پ第ه…«ç« 第11讲
sbit PWMOUT = P1^7;
void main()
{
LED_Init();
EA = 1;
TIM0_Init(100,9);
while(1);
}
void TIM0_IRQHandler() interrupt 1
{
static u8 pwm=0;
TH0 = T0RH;
TL0 = T0RL;
pwm++;
if(pwm>=200)pwm=0;
if(pwm<10)PWMOUT=1;
else PWMOUT=0;
}
|
وˆ‘ن»¬ç”»ه‡؛و³¢ه½¢ه›¾
و–电ن¹‹هگژوˆ‘ن»¬وٹٹ舵وœ؛و،¨و‰هˆ°هڈ¦ن¸€ن¸ھ角ه؛¦ن½چ置,然هگژه†چن¸ٹ电,观ه¯ں舵وœ؛و،¨çڑ„ه®éھŒçژ°è±،ه¥½ه¥½é¢†و‚ںè؟™ن¸ھه°ڈو¨،ه—çڑ„ه·¥ن½œهژںçگ†م€‚
|








